Opening
| Project Trajectory | Project Pages | ||
|---|---|---|---|
| Home | Problem Definition | Opening | locker |
| Planning and Milestones | Background Research | Chimney | |
| Meetings | Requirements | Chimney to Cubby | |
| Design Method(s) | Brainstorm | Cubby to Person | |
| Personal Logs | Concepts Chosen | Software | |
Click to view the process of Designing the Opening Component.
How It Works

- Drone Finds package delivery station X through GPS coordinate.=
- Drone receives signal from call unit & navigates toward the drop zone
- Signal from Drop Zone to Drone to say that platform is clear
- Package is dropped onto dropzone
- RFID of package is identified; coupled on a cubby location and information is sent to the next phase of system
- Garage Door opens
- Wiper x initiates and pushes tote to align with edge
- Wiper y initiates adn pushes tote into chimney
- Garage door closes
- Opening system resets awaiting next drone.
In Depth - How Opening Works
-
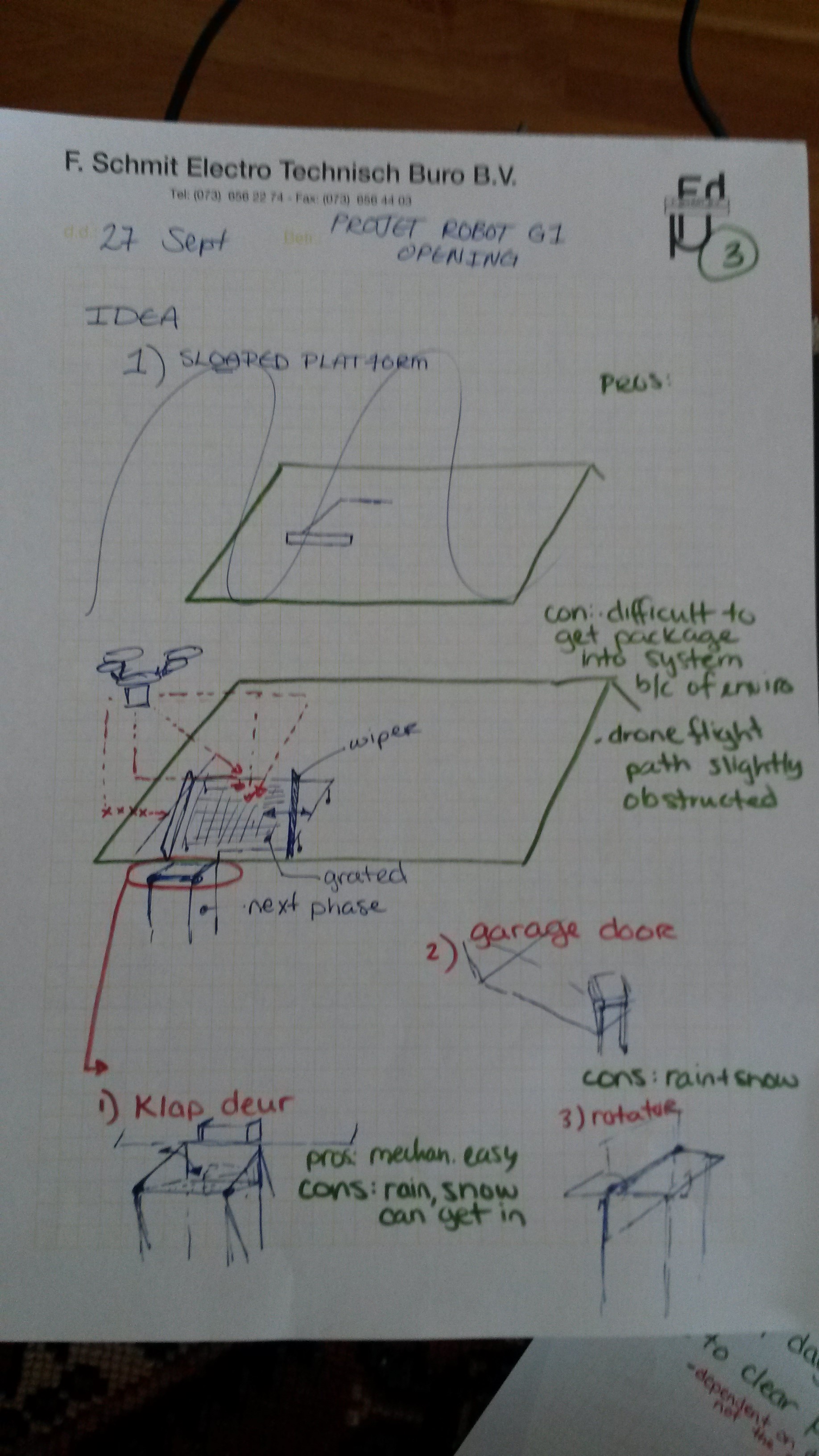 KS-OpeningP3-27-09
KS-OpeningP3-27-09
Sloped Platform & Door Ideas -
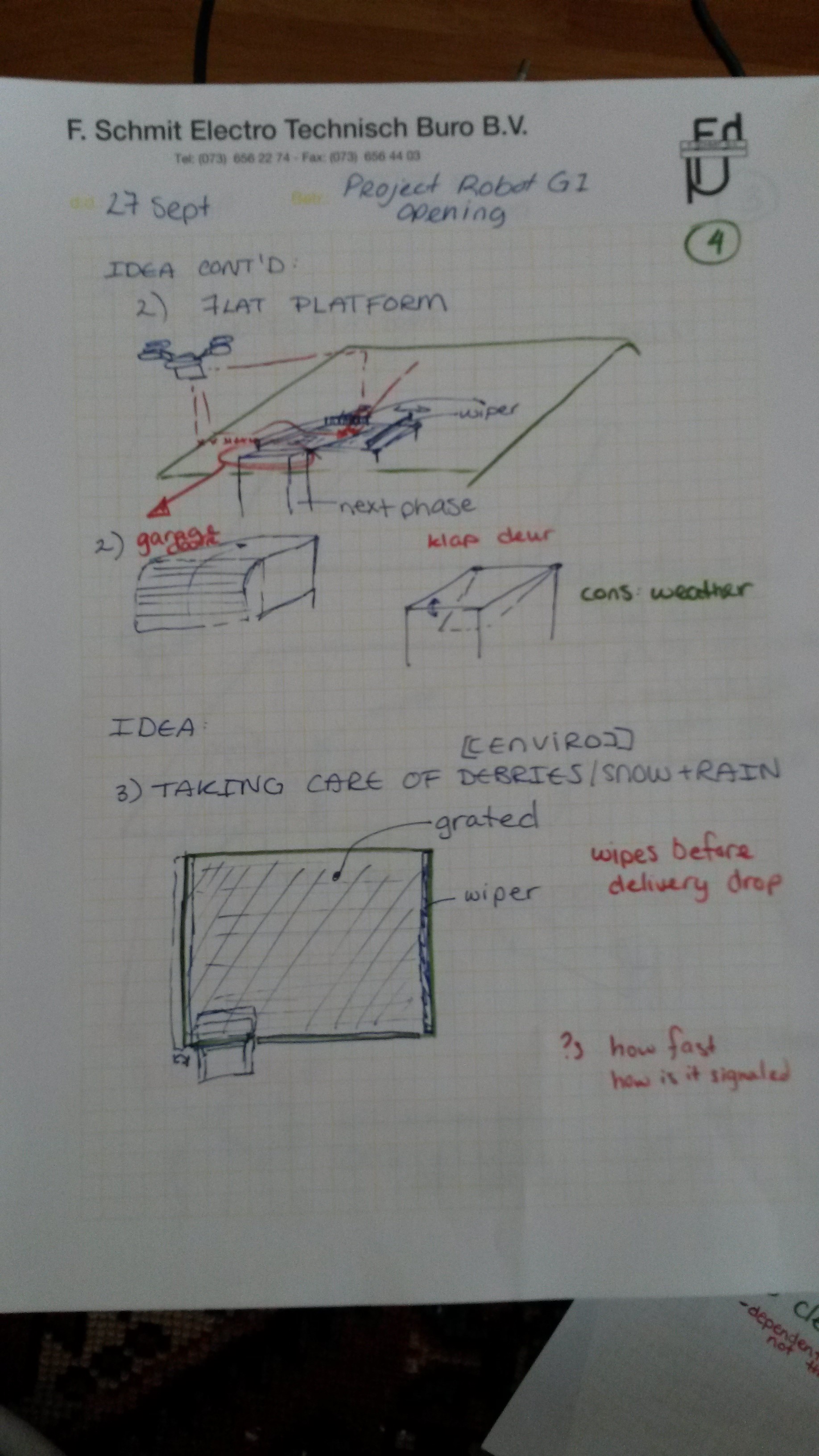 KS-OpeningP4-27-09
KS-OpeningP4-27-09
Flat Platform & Debris Ideas -
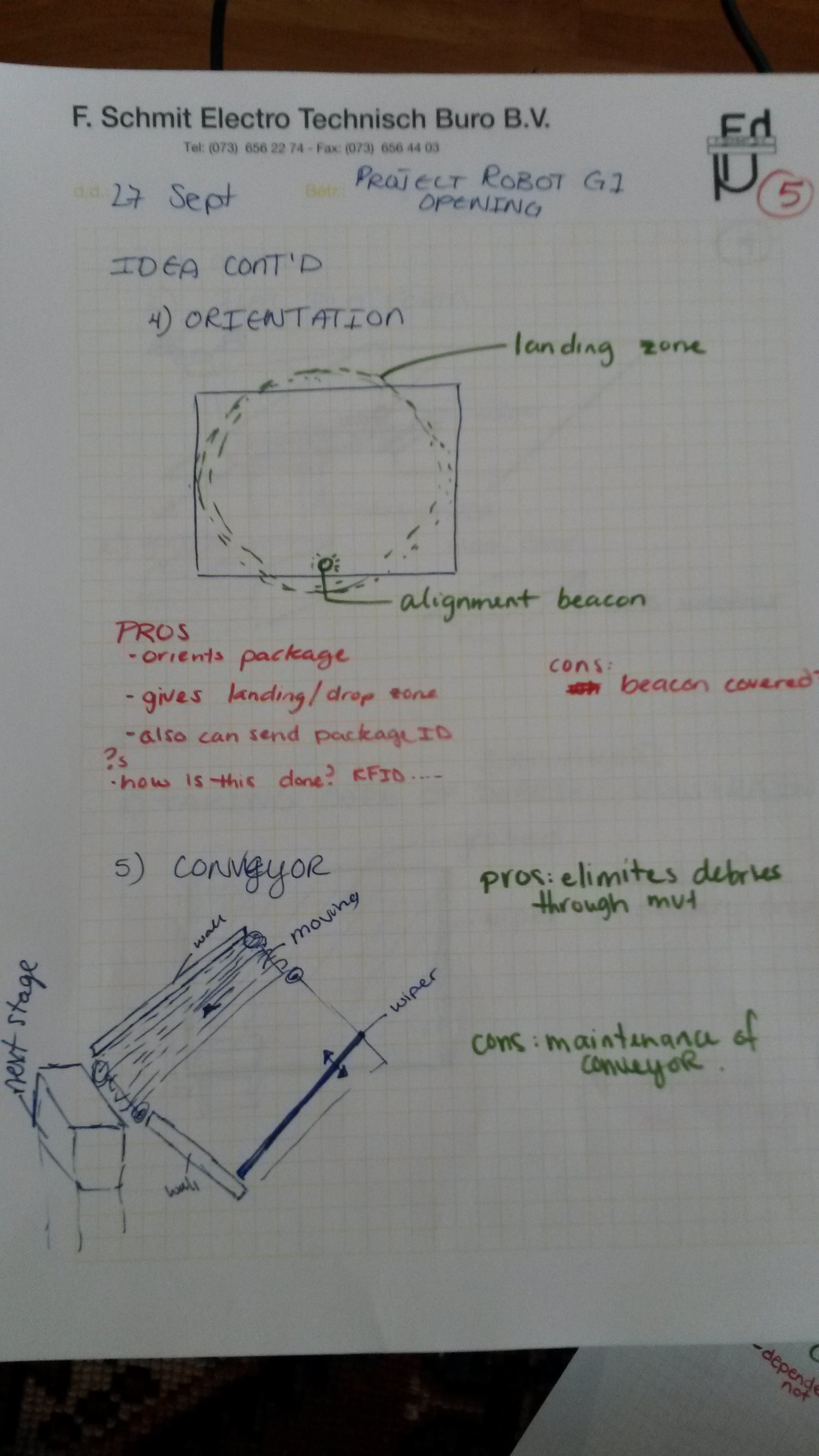 KS-OpeningP5-27-09
KS-OpeningP5-27-09
Orientation Idea & Conveyor Idea -
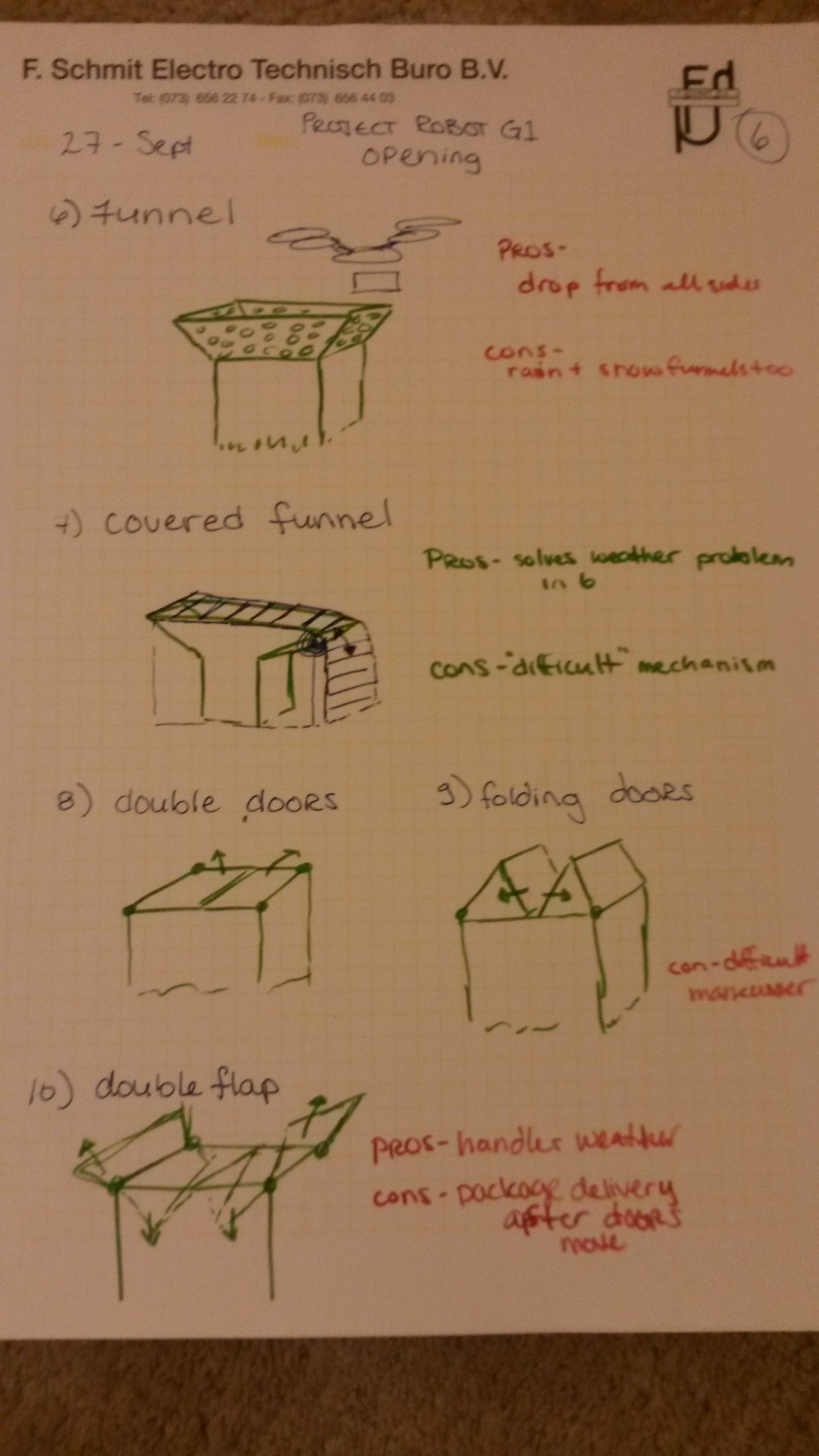 KS-OpeningP6-27-09
KS-OpeningP6-27-09
Funnel & Door Ideas




1. Finding Delivery Station
Each package pick-up station is placed at a certain location ( be it a supermarkt, in the center of a neighboorhood etc.), GPS location and Identification numbers are coupled to it.
The drone, which has GPS navigation, can be input with the pick-up location ID and then navigate towards the GPS location.
This portion uses the system described in Patent US7636621.
It has been tweaked to suite the purposes of this design.
Description of how it works in the patent:

"Please refer to FIG. 2, which is a functional block diagram of an autonomous mobile device with its changing station according to the present invention. In FIG. 2, the autonomous mobile device 2 is comprises of: a capacity inspection unit 21, a power unit 22, a first control unit 23, a first wireless transmission unit 24, a first reception unit 25, a mobile unit 26 and a first charging interface 27; and the call unit 3 is comprised of: a second control unit 31, a second wireless transmission unit 32, a second wireless reception unit 33, and a second charging interface 34. The capacity inspection unit 21 is capable of detecting the power of the power unit 22 while transmitting the result of the inspection to the first control unit 23. As soon as the detection of the capacity inspection unit 21 shows that the power of the power unit 22 is too low and the first control unit 23 is informed of the detection result, the first control unit 23 will direct the first wireless transmission unit 24 to issue a first radio wave signal S1. As the first radio wave signal S1 is received by the second wireless reception unit 33, it is redirected to the second control unit 31 for enabling the same to command the second wireless transmission unit 32 to issue a second radio wave signal 52. Thereafter, as soon as the second radio wave signal S2 is received by the first wireless reception unit 25 and is redirected to the first control unit 23, the first control unit 23 will direct the mobile unit 26 to move toward the call unit 3. Therefore, as soon as the connection port P1 of the first charging interface 27 is in contact with the connection port P2 of the second charging interface 34 and by the cooperative operation of the first and the second control units 23, 31, the autonomous mobile device 2 is charged by the call unit 3." [1]
Tweaks made:
The capacity inspection unit 21 becomes a location inspection unit 21 and there will be no charging interface.
The scenario would be as follows:
"As soon as the detection of the Location inspection unit 21 shows that the current GPS location is the same as the destination GPS location and the first control unit 23 is informed of the detection result, the first control unit 23 will direct the first wireless transmission unit 24 to issue a first radio wave signal S1. As the first radio wave signal S1 is received by the second wireless reception unit 33, it is redirected to the second control unit 31 for enabling the same to command the second wireless transmission unit 32 to issue a second radio wave signal 52. Thereafter, as soon as the second radio wave signal S2 is received by the first wireless reception unit 25 and is redirected to the first control unit 23, the first control unit 23 will direct the mobile unit 26 to move toward the call unit 3. Therefore, as soon as the location inspection unit indicated 0 offset in the x and y direction and 1ft positive offset in the z direction from S2, hovering directly above call unit, the drone stops motion and awaits next signal."
N.B Calculation is performed to make the movements of the drone to the call unit. In these calculations there should be a 1ft offset in the positive z direction performed first to ensure that the drone hovers above the platform and not under it.
!!!!!!Insert Scenario sketch here!!!!!
3. Package Drop & Identification
4. Package To Chimney
Mechanics
The Drone is equipped with:
- a location inspection unit
- a GPS unit
- a 1st control unit (C1)
- a 1st wireless transmission unit (W1)
- a 1st reception unit (R1)
- a mobile unit
- an omnidirectional antenna
The Dropzone is equipped with:
- a 2nd control unit (C2)
- a 2nd wireless transmission unit (W2)
- a 2nd reception unit (R2)
- an omni-directional antenna
References
- ↑ Industrial Technology Research Institute-Taiwan. (2009). Path Guidance method for autonomous mobile device. <http://www.google.com/patents/US7636621>