PRE2024 3 Group14
Street Cleaning Robot
| Name | Student ID | Current Study Programme |
|---|---|---|
| Chantal Smits | 1689339 | Electrical Engineering |
| Julien Rodriguez | 1829599 | Computer Science and Engineering |
| Mihail Abramov | 1813978 | Applied Mathematics & Computer Science and Engineering |
| Anbiya Popal | 1838849 | Electrical Engineering |
| Danila Bogdanovs | 1782746 | Electrical Engineering |
Introduction
A lot of the streets in big cities all over Europe are full of litter. Only 10% of places do not have litter. This is something that is noticed by and bothers a lot of people. The litter is often washed away by rain and eventually ends up in our oceans. Therefore we are designing a robot that roams the city center of Eindhoven and collects this litter. Currently this is done by people once a day which is not only labor intensive, but also means that the litter can be on the streets for up to 24 hours, which means that the trash is more likely to end up in the sewers, and eventually the oceans. Besides keeping the streets cleaner, our robot is also more efficient, as it detects where trash is located and only cleans in those places. This means that energy is used more efficiently, the robot will be less of a disturbance and is cheaper than human labor over a long time. Combine that with the city streets being cleaned throughout the day, resulting in clean streets all day, and the city will end up cleaner, and therefore way more pleasant.
For this project we want to plan out the design of the robot, both its hardware and software. We are focusing this project on the people that will use it and therefore we are basing our requirements on both our own experiences in the Eindhoven center and on interviews with other residents. We will compare our final project with the current situation and prove that our project helps Eindhoven's municipality and residents keep their city cleaner then it is now.
Approach
This project serves as a preliminary design work in developing a robotic solution for trash collection problem. In the span of 7 weeks with a workforce of 5 students it is not possible to fully build a sophisticated trash collecting robot, obviously. Our goal, however is to research and design specific solutions for different aspects of the robot to give a basis for a potential future project to actually make such a robot using our developments.
In order to describe how the robot should be built physically, we design the appearance of the outer shell taking into account user preferences, design the construction of inner compartment, and study what area of Eindhoven is viable for the robot. We list the specific components that can be bought and used to build the robot.
An autonomous trash-collecting robot also must have sophisticated software responsible for perception of surroundings, collecting trash, and pathfinding in the dynamic environment of a street. We describe our trash collection strategy together with a human avoidance strategy to make a simulation in which we test the performance of the robot's algorithm in its goal of collecting trash. The part of perceiving the surroundings using a camera and identifying trash from the picture is out of the scope of this project and deserves a project of this scale on its own. Nevertheless, some guidelines are given for that part as well.
Phase 1 - Research
In this phase the project is started and initial idea is developed.
We define the topic of the project and conduct a literature review on the topic. Consecutively, we define the goal and the plan for the project.
Phase 2 - Requirements
In this phase the project idea is specified based on user opinions.
We perform a general user analysis and a user interview to identify the user's needs and preferences and find out user opinions on the topic. Based on user analysis and interviews, we define specific requirements for the robot.
Phase 3 - Implementation
In this phase the robot design is implemented.
We design the trash collection strategy with human interaction and write a simulation based on the strategy. We document the trash collection strategy and human interaction strategy in UML diagrams. We make a mechanical design of the robot's components and several designs of the outer shell.
Phase 4 - finalization
In this phase the project is wrapped up, implementation is tested and a final presentation is given.
We collect user opinions on the design of the outer shell and choose the most preferable option. We make adjustments on the design based on user comments. We make a benchmark of quality and efficiency of trash collection and test in simulation how good the robot strategy is compared to the approach currently in use by Eindhoven's municipality. We finalize the simulation and trash collection strategy based on feedback from testing.
Assumptions
To create the entire robot is too ambitious for the 7 weeks of this project, so we assume some parts of the robot already exist or can be created.
- GPS is used so the robot can locate its assigned route in the city and to locate the trash bins to deliver the trash when full.
- There are sensors that can sense anything within a 10m radius.
- An AI algorithm connected to these sensors can conclude whether these things are people, obstacles or trash to pick up.
- The wheels that need to be used on the robot should be able to turn on a pretty tight radius.
This means that what we are focusing on creating how the robot interacts with everything it detects and on how the robot looks.
Planning
Based on the chosen approach the planning of the project was created. The four phases of the project were split into more specific tasks and the timing for each task is specified. The planning is summarized in the following Gantt chart below:

The research should be performed in the first two weeks. The requirement identification will be performed up to week 3. Having the results from research and requirements phases, the implementation phase will be performed. Implementation will span from week 4 to week 6. The finalization phase concludes the project in weeks 6 and 7 after the implementation is completed.
Milestones
End of...
Week 1 - Having a plan for the project and research about the topic.
Week 3 - Finished interviews and user analysis. Specified robot requirements.
Week 5 - Designed robot algorithm and mechanical design
Week 6 - Made a simulation and UML diagram of robot functionality
Week 7 - Verified simulation on quality measures. Verified robot appearance satisfaction through surveys. Presented the project.
Literature Review
State of the art
Autonomous trash collecting robots are designed to identify, collect, and dispose of waste materials efficiently. Many of these robots use computer vision, AI-based object detection, and autonomous navigation to function effectively.
Sivasankar et al. (2017) describe an early-stage autonomous trash robot capable of collecting garbage using a predefined route. Nagayo et al. (2019) further enhance this concept by incorporating a wireless charging system, ensuring that the robot remains operational for extended periods in a campus environment.
A more advanced model by Kulshreshtha et al. (2021) integrates YOLOv4-tiny, a deep-learning-based object detection model, enabling higher accuracy in trash detection. Othman et al. (2020) contribute by designing an automated trash collector that uses sensors to improve object detection and classification.
Artificial intelligence in cleaning robots and multi-robot systems
Furthermore, Nayak et al. (2009) introduce the "TailGator", a semi-autonomous trash-collecting system designed for outdoor environments. These studies show how new waste management systems are powered by artificial intelligence in some way. Recent studies also researched multi-robot systems, where drones and ground robots collaborate to identify and collect litter. Milburn et al. (2023) present the Tandem Rover and Aerial Scrap Harvester (TRASH) system, which integrates a ground robot and a drone to collect waste more efficiently. Together with the aerial mapping waste detection system presented by Akbari et al., these two systems represent a state-of-the-art, multi-robot waste management approach. Integrating the two would result in a fully autonomous, intelligent waste collection system that detects waste using drones, maps and classifies waste with computer vision and GPS data and deploys a ground robot to collect waste, optimizing routes based on the drone’s findings.
Trash collector robots and the environment
Trash robots contribute significantly to environmental sustainability. MacLeod et al. (2021) highlight the global plastic pollution crisis, emphasizing the need for employing robots in waste collection. He et al. (2022) discuss microplastic pollution, noting how robotic trash collectors could aid in reducing the spread of plastic waste.
In urban settings, robotic solutions have been proposed to address litter issues caused by nightlife and tourism. Becherucci & Pon (2014) compare waste accumulation in nightlife-dense areas, while Fallahranjbar et al. (2018) propose urban planning strategies combined with robotic waste collection. Burlakovs et al. (2020) propose the use of IoT-based smart waste bins which help optimize waste collection schedules using AI-based analytics. These studies give sufficient grounds on which one could say that deploying robotic trash collection systems in highly polluted urban spaces has social and environmental benefits.
The trash robot's challenges
However, these technological advancements are having several challenges that complicate the adoption of trash robots. Firstly, most trash robots rely on battery power, limiting the time for which one such robot could operate. A solution could be deploying multiple robots that could work in “shifts”, but this sparks another challenge: high costs and scalability issues. Sunil & Shanavas (2023) discuss how autonomous office waste collection robots face financial and technical barriers in deployment, meaning that financial struggles are to be expected when deploying such systems on city scale. Lastly ethical concerns set in, particularly around labor displacement and public safety (Jamil et al., 2023). Additionally, regulatory frameworks must be developed to standardize the deployment of trash robots in urban settings.
To summarize, current technological advancements allow for trash detection, autonomous navigation and multi-robot collaboration. This has the potential of reducing plastic pollution and optimizing urban and tourist area waste management. Future research needs to be done on more energy-efficient designs, lowering costs of the robotic solutions and policy and regulation frameworks.
Littering
Littering remains a significant issue in cities across Europe, impacting environmental well-being and living standards among the people. A survey conducted by the Clean Europe Network indicates that large cities such as Brussels, Copenhagen, Edinburgh, Helsinki, Oslo, Stockholm, and Zurich all experience the same city litter issues. The one-day survey, carried out in various urban settings such as popular landmarks and public parks, showed that litter is prevalent in all these municipalities. The findings point out the necessity for comprehensive national policies against littering, as stipulated by EU legislation mandating the adoption of such policies.
Innovative solutions at the municipal level also have been implemented to minimize littering. In Amsterdam, mini-gardens were installed at the locations where trash bins were placed to make such places look attractive and put individuals off from littering. The measures saw little litter around such bins, showing how the design of urban spaces influences people's behavior.
In the Netherlands, also, efforts by the citizens have been an important reason for addressing litter. Anti-litter activist Dirk Groot, who is otherwise called "Zwerfinator," has played a big role in raising awareness for littering with his extensive data collection. Groot invested careful time measuring and collecting over 700,000 items of litter across the nation, and in doing so, highlighting how common littering is and citizen science's capacity to assist with solving environmental problems.
Specific to Eindhoven, Groot's fieldwork reflected certain litter patterns. His studies revealed that specific places, such as shopping areas and public spaces, were found more frequently littered. Data also revealed the average litter of cigarette butts and snack waste, providing informative material for targeted interventions in the city.
Urban litter has been known to have negative effects on urban residents' quality of life. A Keep Britain Tidy survey of the country concluded that only 10% of English streets and parks are litter-free. "A Rubbish Reality," a report, concluded that areas in the most disadvantaged areas were three times more likely to be littered. The common litter consisted of cigarette butts, sweet wrappers, and drink cans. The research emphasized the negative effect of litter on the mental well-being of residents, sense of security, and community economic growth, with most of the respondents hesitant to invest in areas with litter.
User and stakeholder analysis
The primary users of our product include city waste management departments, cleaning staff, urban residents, local businesses and tourists. City waste management teams wish to lower operational costs and improve street cleanliness but have to deal with high manual labor expenses and workforce limitations. The robot addresses these issues by offering round-the-clock cleaning. Municipal cleaning staff reap benefit from reduced physical efforts as the robot can perform repetitive tasks and leave more complex tasks for the staff. In addition, regular waste collection will improve the quality of life of the city’s residents who desire cleaner streets for hygienic and aesthetic reasons, local businesses who depend on tidy surroundings to attract their clientele and tourists who want to enhance their overall experience and who can build a good reputation for the city.
The stakeholders, parties indirectly affected by the robot’s implementation include city officials/ urban planners and environmental agencies. City officials and urban planners must take into account public perception, cleanliness standards, and budgeting, with the potential benefit of improved waste management and city image. Environmental agencies vouch for pollution reduction and sustainable waste disposal, which the robot could support through eco-friendly features, like being fully electric. Additionally, waste management companies must be able to integrate the robot into their existing collection systems, improving operations and facilitating collaboration.
Interviews
.jpg)
For the interviews ten residents of Eindhoven were interviewed on how clean the city is in their experience. The aim of these questions was to find out where in Eindhoven the biggest problem with trash is and how people would feel about a robot roaming the streets.
Interview questions
General questions about the current waste situation in Eindhoven
- Do you usually spot trash on the streets of eindhoven. If yes, then in what places of the city the most?
- Does it bother you if there is a lot of trash on a street?
- How much trash do you usually see in the city center?
- What do you think is the reason(s) why the trash is ending up on the ground?
- Is there anything the municipality should or could do to reduce the amount of trash on the streets?
- What types of trash do you see in eindhoven most often?
.jpg)
Questions about the robot
- Do you think robots cleaning the streets could help to reduce the amount of trash noticeably?
- Imagine you’re seated outside in the city center. What should be the intervals between a robot passing you to clean a street, so that you’re not disturbed by it? (Note: The idea of the question is that too frequent cleanings can disturb people)
- What behaviour would you expect from the robot in a crowded place? (How you would expect to behave if it has too pass through a crowded street)
- How close do you prefer the robot to pass relative to you, in order for you to feel comfortable?
- What actions of the robot do you think can repel or make people uncomfortable?
- Would you see a robot being exploited or vandalized often? In what way do you think it could happen?
- Would you have privacy concerns if a robot had cameras for protection?
Results
The answers of these interviews were collected, and have been documented in the images, so they can be used to find the requirements of the robot.
From the answers we understood that the trash needs to mostly be collected in the city center. Besides that we also count that most of the trash is rather small and it ends up on the street because of a lack of bins and negligence.
The interviewees seemed to like the idea of a robot, as long as it is efficient and not too disturbing. The answers about privacy concerns varied more among the participants, some people did not care, while others did not want to be filmed at all, for this reason we are need to minimize the amount that the robot films, while still keeping the robot safe. This is still necessary participants did indicate that they expect the robot to be vandalized.
Requirements
Safety features
The robot is required to have are the following: Advanced collision avoidance system, using LiDAR, ultrasonic sensors and computer vision to effectively identify people in its path and safely navigate around them without pushing into crowds and causing inconvenience. Speed control systems and smooth, predictable movement patterns to avoid inconsistent acceleration, sudden stops and potentially unsettling movements. Non-intrusive sound and light signaling, meaning no loud sounds or bright, flashing lights. Instead, it should use subtle sounds and light indicators similar to those of regular vehicles to communicate its movement and stops. The robot should keep a distance of at least one meter away from pedestrians for them to feel safe and comfortable. The robot must show environmental and context awareness. It should dynamically adjust its route based on pedestrian density data, moving to quieter streets if necessary.
Vandalism measures
The robot should have a low center of gravity to make it difficult to be toppled. Furthermore, a tough frame and casing and an alert system that notifies authorities in case of damage or theft attempts is in order.
Privacy
A reasonable compromise is having the system store only the last 15 minutes of camera data. This balances the the need for security and reduces the risk of mass surveillance or misuse of long-term data. The data recorded at the time of an incident will be stored until the issue has been resolved.
Movement
To ensure the robot interacts with humans in traffic in a safe manner, it should adhere to some rules. Based on the answers from the interviews, the following rules should be adhered:
Speed
One of the most-mentioned features was the speed of the robot. It should always, regardless of circumstances, keep to a certain maximum speed. When it sees any humans in front of it within 15 meters, it should decrease its speed to 60% of its maximum, and if humans are within 3 meters in front, the robot should reduce to 20%. If they are within 1.5 meters in front, the robot should gradually come to a stop, so as to not seem erratic (which many people described to be something the robot shouldn't do). By choosing 1.5 meters to already do this at, the robot can still stick to the 1 meter minimum distance and also slow down gradually.
An exception to this: The robot should, if it is not already at the 20% speed, slow down faster to prevent running someone over. This would occur if someone last-minute jumped in front of the robot, crossed the robots path very close to it, etc. This could be considered almost an 'emergency stop'.
When slowing down, it's important for the robot to emit a red light at the back similar to a car's brake lights. With this, pedestrians and cyclists know how to interact with the robot in traffic better, since they're used to this.
Crowds
An important fact that many interviewees mentioned was that the robot should avoid driving when large crowds are present. A way to measure crowdedness for the robots cameras could be to gauge what percentage of the road is blocked by pedestrians within e.g. 5 meters. With this, the robot can decide to slow down, or to stand still in the crowd completely if it is too busy. If they do this, they should have blinking lights akin to a cars warning light. People can then walk around the robot, since it's a stationary object. If they come to a restart when the crowd dies down, the robot should then start up very slowly.
Direction
The direction of the robot is also important. To be as predicatable as possible, the robot should try to pass pedestrians on the right as much as possible, since that's also what traffic laws would dictate. If there's a large crowd to the right of the robot however, the robot can always choose to divert to the left, granted it indicates its direction in advance the same way a car would (with lights). It should do this for any turns, as well as when passing someone on either side.
Conclusion
This description is left intenionally quite vague. There's various parameters from this that can be tweaked based on simulations. The following are up for variations:
- Maximum speed
- Percentage of max speed when people are near
- Percentage of max speed when people are within 3 meters
- De-acceleration of the robot when gradually stopping
- De-acceleration of the robot when emergency-stopping
- Acceleration when returning from standstill
- Percentage of path to be blocked for it to operate in crowd mode
List of requirements
| Index | Description |
| 1.1 | The robot shall be equipped with a camera |
| 1.2 | The robot shall have 4 wheels |
| 1.3 | The robot shall be equipped with a speaker |
| 1.4 | The robot shall have a container for trash |
| 1.5 | The robot shall have rotating sweepers |
| 1.6 | The robot shall have a vacuum mechanism |
| 1.7 | The robot shall be equipped with GPS |
| 1.8 | The robot shall be connected to the internet |
| 1.9 | The robot shall be equipped with LEDs |
| 1.10 | The robot shall be equipped with a rechargeable battery |
| 1.11 | The robot shall have a body casing to hold all electrical components |
| 1.12 | The robot shall be shorter than 1.5 meters |
| 1.13 | The robot shall be taller than 0.5 meters |
| 1.14 | The robot shall not be wider than 1 meter |
| 1.15 | The robot shall not be longer than 2 meters |
| 1.16 | The robot shall be able to store at least 30 liters of trash |
| Index | Description |
| 2.1 | The robot shall detect trash on the ground |
| 2.2 | The robot shall compute distance to detected trash |
| 2.3 | The robot shall detect people |
| 2.4 | The robot shall compute distance to detected people |
| 2.5 | The robot shall be able to suck up the trash directly beneath it |
| 2.6 | The robot shall move using its wheels |
| 2.7 | The robot shall be able to cross sidewalks |
| Index | Description |
| 4.1 | The robot shall detect when a person touches it |
| 4.2 | Upon a person touching the robot, it shall notify a person to stop touching it |
| 4.3 | The robot shall detect when a person approaches too close |
| 4.4 | Upon a person approaching too close to the robot, it shall notify a person to keep distance |
| 4.5 | The robot shall detect when it is being kicked |
| 4.6 | The robot shall detect when it is being overthrown |
| 4.7 | The robot shall detect when its components are being damaged |
| 4.8 | Upon being kicked or overthrown or damaged the robot shall make an loud signal notifying people to stop vandalization |
| 4.9 | Upon being kicked or overthrown or damaged the robot shall contact the security |
| 4.10 | The robot shall keep the footage at most 1 week |
| 4.11 | The footage shall be accessed only in case of robot being vandalized |
| Index | Description |
| 5.1 | The robot shall not move faster than 5km/h |
| 5.2 | The robot shall not move closer than 1 meter to people |
| 5.3 | The robot shall not make noise louder than 60 db |
| 5.4 | The robot shall not pass the same place more often than once in 30 minutes |
| 5.5 | The robot shall work for at least one day without human maintenance |
Area Description for Eindhoven

To avoid the robot having to interact with traffic, and for it to clean the most relevant streets, the area it does and doesn't cover should be specified.
Outer bounds
The bounds of the map are mostly defined by what area is strictly pedestrian. In the north, we are bounded by the 18 Septemberplein, since north of it is shopping center Piazza, which is indoors (and out of scope of the robot).
The other bounds on the west are the Emmasingel and de Wal, and on the east side there's the Vestdijk. It will have to drive exclusively on the sidewalk closest to its region on these streets, as otherwise it would have to heavily interact with traffic. This means areas like the Clausplein and the Dommelstraat are not included.
In the south is the Dommel, which is the last bound.
Crossings
The only two areas where the robot risks interacting with traffic are the crossing between the Vestdijk and the Kanaalstraat, and the crossing between de Wal and Grote Berg. At the first, the robot can largely avoid traffic by taking the pedestrian area, meaning it only has to interact with traffic from cars going to the parking garage. This is not ideal, but still favorable compared to interacting with a busy crossing.

The other crossing, at de Wal and de Grote Berg, is also manageable. Cars are not allowed to drive into the center here. The only thing is to look out for cyclists and delivery vans that have exceptions, which don't usually show up during the day.


In the south, it should avoid the last bit of Stratumseind, since it's hard to reach and close to water. The path connecting the end of Stratumseind to the Vestdijk is a dirt path, which is most likely not that easy for the robot to drive on.
Squares
One important detail to take into account for the robot is the squares in the city center. There's a few: In the north is the 18 Septemberplein, which is quite large and connects to Piazza. This square sometimes hosts the market, which is when it should avoid this square.
A bit south of that is the Markt, but this square usually split into two streets on either side because of the terraces that restaurants put in the middle of it. It should be mindful of waiters walking from the restaurants to the terrace on busy days.
Another square is the one next to Dynamo, the Catharinaplein. This square often has a lot of trash, since it is close to Stratumseind. In the evening, on busy nights it is often used for bike parking.
Next to that is the area right at the start of Stratumseind. There's two kebab places next to it, so this often has a lot of trash, especially in the evenings and early mornings.
At the other end of Stratumseind, before the bridge, there's a part where the street connecting the Oude Stadsgracht to Stratumseind becomes a lot wider, which means it should also be regarded as a square for the robot's pathfinding.
Another large square is the Stadhuisplein.
Busy streets
In the map above, the larger streets (that have e.g. a lot of shops) are marked in green.
Busy segments that are excluded
Taking into account the bounds set by traffic described above, there's a few noteworthy streets and squares that are not covered.
First off, in the north, the area in front of the station is not covered. There's an Albert Heijn and a few restaurants close by, as well as the street connecting it to the Dommelstraat. The Dommelstraat is also not covered. This street has a lot of restaurants, some of which takeout, and bars. It connects Poppodium Effenaar on one side to the city center (to the Vestdijk). In the west, the street connecting to the PSV stadium is also quite far out of bounds. So is the Willemstraat, as well as the Clausplein. Both Kleine Berg and Grote Berg are also not included.
This is something to be taken into account. Some of these streets are quite busy. That being said, the busiest areas of the city center are all covered with minimal interaction with traffic.
It needs to be noted that this specification is a case study for Eindhoven specifically. If this system were to be implemented in other cities, it would have to be done again for said cities.
Algorithm
In this section the algorithm that decides the robot's actions on its whole lifecycle is described. The algorithm describes robot operation on a high level by abstracting from low level motor control, trash collection, trash disposal, recharging and image recognition functionality. Those are out of scope of this project because of significant amount of work required to develop all those functions. To be able to still execute the algorithm and verify it, a simulation environment is used. Two parts of the algorithm are described - trash collection and a human interaction algorithm, which guide the robot movement along its way.
The full path of the robot is a loop made of several streets, starting and ending at its hub - trash disposal and recharging place. Robot starts its path fully charged and empty. Upon reaching the end of the path, the robot empties its trash compartment and recharges. When fully charged, the robot starts the path again. To avoid the robot from looping and staying too long in one place, the robot only moves forward along its way on a street. Of course, the robot can move forward at an angle up to 90 degrees, which allows it to move left and right along the street as well. The primary goal of the robot is to collect trash. The trash collection algorithm is responsible for choosing the next trash spot to be cleaned. On the street the robot also encounters dynamic obstacles - humans. The human interaction algorithm is responsible for adjusting robot speed to prevent collision with people or too close proximity to people, which can make people uncomfortable. Together they allow robot to dynamically define its whole path from start to finish.
Trash collection algorithm

The next trash spot to clean is chosen using a score function. A score is assigned to each trash spot. It represents the feasibility of cleaning a given spot. The spot with the highest score is chosen as the target. As was mentioned earlier, the robot only moves forward in direction, so only the trash in front of the robot is considered. Four different considerations in reasoning the feasibility of a spot are identified:
- The robot has a preference towards collecting bigger trash spots: A lot of trash in one place is more efficient and thus preferable.
- Trash the path to which is at a big angle with respect to the forward direction of the street is not preferable. The bigger the angle, the more the robot moves from side to side and disturbs people walking along the street.
- The robot should fill its compartment evenly along the path. This leads to even cleaning of all streets along the path. If the robot fills the compartment too fast it can end up being full before reaching the end and leave the last part of the path uncleaned.
- The robot should discharge its battery evenly along the path. This also leads to even cleaning of all streets along the path. If the robot discharges too fast it can die along the path or be forced to move towards the end straight away skipping all trash on the last part.
Addressing these four considerations, a score function is made as a weighted sum of four sub-scores.
Variables
We first describe the variables that are used for the score:
[math]\displaystyle{ x, y }[/math] - variables used for representing a trash spot,z
[math]\displaystyle{ am(x) }[/math] - amount of trash in the spot x (in fullness units of the robot),
[math]\displaystyle{ ang(x) }[/math] - the angle which forward street direction forms with the direction from robot towards the trash,
[math]\displaystyle{ t }[/math] - time passed from the moment robot started the path,
[math]\displaystyle{ T }[/math] - estimation of the total time it should take for the robot finish the path,
[math]\displaystyle{ dt(x) }[/math] - time it takes to reach trash spot [math]\displaystyle{ x }[/math],
[math]\displaystyle{ t_{cl} }[/math] - time it takes to clean a trash spot,
[math]\displaystyle{ t'(x) = t + dt(x) + t_{cl} }[/math] - time after cleaning trash spot [math]\displaystyle{ x }[/math],
[math]\displaystyle{ s }[/math] - distance covered by robot from the start of the path,
[math]\displaystyle{ S }[/math] - total length of the path,
[math]\displaystyle{ ds(x) }[/math] - distance to the trash spot x,
[math]\displaystyle{ s'(x) = s + ds(x) }[/math] - distance covered after cleaning trash spot x,
[math]\displaystyle{ f }[/math] - current fullness of the robot,
[math]\displaystyle{ F }[/math] - maximum allowed fullness of the robot (can be 100% or expressed as volume),
[math]\displaystyle{ f'(x) = f + am(x) }[/math] - fullness after cleaning trash spot x,
[math]\displaystyle{ \epsilon }[/math] - a number very close to zero to avoid division by zero,
[math]\displaystyle{ w_1, w_2, w_3, w_4 }[/math] - weights of the four sub-scores,
[math]\displaystyle{ max_y(h(y)) }[/math] - maximum of a function h over all trash spots.
Scores
Trash spot size
[math]\displaystyle{ s_{am}(x) = \frac{am(x)}{max_y(am(y)) + \epsilon} }[/math],
Angle of movement
[math]\displaystyle{ s_ang(x) = \frac{1 - ang(x)}{90} }[/math],
Even filling
[math]\displaystyle{ s_{full}(x) = 1 - | \frac{f'(x)}{F} - \frac{s'(x)}{S} | }[/math],
Even time
[math]\displaystyle{ s_{time}(x) = 1 - | \frac{t'(x)}{T} - \frac{s'(x)}{S} | }[/math],
Total score
[math]\displaystyle{ Score(x) = w_1 * s_{am}(x) + w_2 * s_{ang}(x) + w_3 * s_{full}(x) + w_4 * s_{time}(x) }[/math].
Weights are tuned during based on the feedback from simulation.
Human interaction algorithm
The human interaction algorithm defines the speed of the robot based on people nearby. One of the goals of the robot is to incorporate into street environment naturally, without causing much people disturbance, so it avoid approaching on sensitive distance to humans. Hall's proxemic zones [Hall, E. T. (1959)] are used to define how comfortable a person is when robot is at certain distance. By Hall, circle of 1m radius is the personal space of a person, circle of 3.6 m radius is the social space of a person. Further starts the public space of a person.
The robot is designed to be allowed to enter public and social space of people, but it does not move into the personal space. The robot moves on full speed until it enters the middle of social space of a person - 2.5 meters distance. When robot approaches closer than 2.5 meters it slows down to 20% of speed to give people more flexibility in avoiding the robot from entering their personal space. Whenever robot reaches personal space of a person, 1 meters, it fully stops and waits for the person to pass the robot. This is not only the comfort measure, but also a safety measure to prevent robot from bumping into people or visa versa. The human interaction algorithm can be described in three options:
- The full speed mode is enabled when no person is closer than 2.5 meters from the robot - robot moves with full speed of 7 km/h.
- The slow mode is enabled when there are people closer than 2.5 meters, but no person closer than 1 meters from the robot - robot moves with 20% of speed, 1.5 km/h.
- The stop mode is enabled when there are people closer than 1 meters from the robot - robot stops completely.
Simulation
In order to verify the trash collection and human interaction algorithm in action, a simulation is developed. The scope of simulation is one street along the whole path of the robot, to reduce the simulation complexity and make it more understandable visually. The street is populated with people passing along it and throwing trash occasionally. Robot passes through the street and collects trash according to the described algorithm. After the robot reaches the end of the street, it disappears for some time - this simulates the robot moving along the rest of its path, unloading trash, recharging and coming back to the simulated street.
Additionally to the robot trash collection, the current way of collecting trash in Eindhoven is simulated as well. The trash in Eindhoven is collected once a day in the morning, so in simulation of this trash collection strategy the trash is fully removed once in a day.
The robot trash collection algorithm is compared against the current trash collection way, which allows to make some conclusions about performance of the robot algorithm. The user can easily switch between cleaning strategies with "Enable Robot" checkbox.
Simulation environment
For development of the simulation, Mesa simulation environment (Python library) is chosen. Mesa is a modern simulation environment, which provides all convenient simulation functionality, similarly to NetLogo, but also is written in a modern high-level programming language - Python - which enhances capabilities for development of advanced path finding algorithms.
Parameter units and ranges
In the simulation, we assigned 1 unit of length to 1 meter, and 1 unit of time (or 1 step) to 1/10th of a second. The speeds of both people and the robot are measured in km/h. We define a trash unit as a singular piece of trash, which can include items like a cigarette butt, a plastic bottle, a tissue, an empty wrapper and an empty can, amongst other things. Below, we mention a littering rate parameter, this is defined as the number of trash units produced per person per day.
In order to finely tune our simulation for most accuracy, we added sliders for the following parameters:
- Street length [3m to 200m]
- Street width [3m to 20m]
- Number of people [1 to 200]
- Speed of Human [1km/h to 20km/h]
- Littering rate [0 to 100]
- Maximum speed of robot [1km/h to 50km/h]
- Robot capacity [0 trash unit to 200 trash units]
- Robot visibility [0m to 50m]
Simulation configuration

For the simulation, we decided to model Hermanus Boexstraat, a street in the middle of our boundary, stretching from the 18 Septemberplein all the way to Markt. The dimensions of this street are 120m by 15m. We will make multiple simulations with varying number of people, further details are provided below. As for the Speed of humans, we took the average walking speed of 5 km/h. The littering rate was chosen to be 12 trash units per person per day. The maximum robot speed is 7 km/h, this is the same speed as Avride delivery robots who have a similar build to ours. The robot's capacity was chosen to be 50 trash units and it's visibility to be 10m.
Human Movement and Trash Generation
Modeling human movement through the street is extremely complex. For this simulation, we boiled it down to people moving from 1 side to the other, their direction of movement is determined by which side of the street they enter from. Humans enter from both sides randomly, and have minor changes to their direction throughout their walk to make it seem less robotic. In addition, they will avoid staying in each other's personal space, defined as a 2.5m radius in front of each individual, if a person or the robot is detected in their personal space, they will slightly adjust their trajectory and move away. Depending on littering rate, each person will at a random time enter a littering state, when in this state, the person will look around in a 6m radius for trash on the floor, if they do find trash on the floor, they will go to that location and add litter to that pile, otherwise, they will litter at their current position. This mirrors the fact that humans will feel less guilty to litter in places that are already dirty. As there are multiple fast foods in our selected boundary which are a significant contributor to trash in the area, littering rates are tripled from 12:00PM to 2:00PM during lunch and 7:00PM to 9:00PM during dinner.
Running simulation
The simulation was developed on github repository REPOSITORY.
- Model.py has the main code of the simulation model
- Agents.py has the code of all the agents - humans, robot, trash
- App.py has the code which creates the visualization
- Algorithm.py has the logic of trash collection algorithm
The simulation can be installed and run by following the steps:
- Prerequisite - Python. Install python version 3.
- Open the RELEASE link with the files of runnable simulation.
- Download the archive file trash-simulation.zip and unzip it
- pen trash-simulation folder from the archive using terminal or an IDE.
- Inside trash-simulation folder run command: python run.py or python3 run.py
- The simulation will start running in a browser window.
Working with the simulation:
- Simulation can be played continuously by clicking resume button.
- Simulation can be reset anew using RESET button.
- Simulation can be played one step by clicking STEP button.
- Simulation parameters, mentioned in "Parameter units and ranges" section previously, can be adjusted using sliders and resetting the simulation using RESET button.
- Simulation can be speeded up or down using two top sliders.
- To see faster how robot collects trash, parameters "Littering rate" can be increased and parameter "Robot time out of screen" can be decreased.

Verification
In order to verify our robot's efficiency, we will define a cleanliness measure and a disturbance measure that will be calculated under varying levels of street activity.
Cleanliness Performance Measure
To test whether our robot has a bigger impact on the overall street cleanliness, we will plot the amount of trash on the street over a 24h time frame with the robot and without it. From this we can extract the maximum amounts of trash visible at any point and the average amount of trash on the street for both cleaning strategies. The aim is to minimize both the worst-case scenario and the average amount of trash on the street.
The reason behind choosing maximum and average trash on the street for our cleanliness performance measure is because, the maximum amount of trash represents the worst-case scenario, which leaves a strong emotional impact on pedestrians due to its shocking and overwhelming nature. As for the average amount of trash, it provides valuable insight on the city's general cleanliness, creating the overall perception of the city's upkeep, this perception has a lasting effect on pedestrians and tourists whether it is good or bad.
Disturbance Performance Measure
To test how disturbing the robot can be during its operation, we will calculate the percentage of time our robot is near people. We will define 3 levels of closeness:
- Contact: The robot is within 1m of a person
- Close: The robot is within 2.5m of a person
- Distant: The robot is further than 2.5m of any person
We can assess the percentage of time the robot spends in each category whilst it is on the street. The aim is to minimize the amount of time the robot is in Contact or Close to someone. Unfortunately it is not possible to compare the disturbance measure to the current way the streets are being cleaned. Given that the current cleaning procedure is once a day and early in the morning, it is arguable that it is not a nuisance to most people. There is no simple solution for making this robot less disturbing than the current cleaning procedure, the insight provided by this performance measure can only help us with making our judgement on which cleaning strategy is best overall.
Simulation parameters
We will run 3 simulations:
- Low traffic street: ~5 people at any given time

- Average street: ~20 people at any given time

- Crowded street: ~150 people at any given time

The number of people we decided to assign to each street is arbitrary, in reality the number of people on a street depends on multiple factors, street size, location and time of day. For sake of simplicity, we opted to keep the number of people in each street somewhat constant.
Low Traffic Street


In low traffic, the current cleaning strategy averages 36.6 units of trash in a whole day and amasses 73 units of trash at its worst right before 6:00AM when it gets cleaned again. In contrast, with the help of our robot, the street has an average of 3.8 units of trash at any given moment, and never exceeded 11 units of trash during the day. Notice that by midday, the amount of trash produced when there is no cleaning robot already exceeds the worst-case scenario when there is a robot operating. Furthermore, it only disturbed people 3% of the time during its operation. In this scenario, it seems that our robot is an obvious better option, as the average trash decreased by 89.62% and the maximum decreased by 84.93%, with minimal disturbance.
Average Street


In normal conditions, the current street-cleaning strategy has an average of 160.3 units of trash daily, peaking at 312 units. In contrast, our robot maintains an average of 17.2 units of trash at any time, with a maximum of 51 units throughout the day, so a 89.29% reduction in average trash and an 83.65% drop in peak accumulation. This time again, the base cleaning strategy reaches the maximum of 51 units of our proposed cleaning strategy at midday. However, the percentage of time where the robot was in a person's personal space increased from 3% to 11.9%.
Crowded Street


Finally, under crowded conditions, such as carnival or new years eve, the current cleaning system results in an average of 1217.9 units of trash daily, with accumulation peaking at 2383 units. In comparison, our robot maintains an average of 636.0 units of trash at any given time and caps daily maximum accumulation at 1160 units, achieving a 47.78% reduction in average trash and a 51.33% decrease in peak levels. In crowded conditions, the base cleaning strategy reaches the worst-case scenario of the robot cleaning strategy at 4:00PM. Unfortunately, the trade-off involves a considerable increased of robot's intrusion, It is 66.2% of the time in a person's personal space, 15.3% of which it is in close contact of said person.
These observations indicate that the robot would be most efficient in low traffic and normal conditions because it considerably decreases both the average and peak amounts of trash on the street whilst maintaining a reasonable level of disturbance. However, its performance is not nearly as remarkable when confronted with a busy street. The robot is constantly waiting for people to pass and cannot fulfill its function as intended, furthermore it does not seem to recover from the littering spikes during lunch and dinner as well as it did in the other runs.
Appearance
Although the robot cannot be less disturbing then a street sweeper passing once a day, we can minimize our robots intrusiveness by designing a proper and welcoming frame. In designing its appearance, we must carefully consider the size, functionality, and public perception. The robot needs to be efficient at cleaning while maintaining a presence that feels welcoming rather than intrusive. It has to be large enough to store a reasonable amount of collected waste but not too large that it would obstruct or bother pedestrians. To find the right balance, we developed five design concepts, each addressing different aspects of efficiency, size, and public interaction.
Short and Wide

This model is built for stability, featuring a compact, low-to-the-ground design that prevents it from being easily toppled over. Its broad structure allows for a sturdy, grounded appearance, which can be reassuring in busy pedestrian areas. However, its width makes it less suitable for navigating narrow sidewalks or tight spaces, potentially limiting its mobility in certain areas of the city center.
Storage Efficient

This design maximizes internal storage, allowing the robot to collect and store large amounts of waste before needing to return to the waste collection point. Its tall and elongated shape makes it highly efficient in terms of waste management. However, its imposing size might be seen as intrusive, potentially bothering pedestrians and disrupting the flow of traffic in more crowded areas.
Tall and Slim

This model emphasizes a tall and slim design, giving it a slightly more human-like presence. Its vertical build allows for a surprisingly good storage capacity despite its slender frame. The appearance is designed to create a welcoming presence in the city center, helping pedestrians feel at ease around the robot. However, its narrow base makes it more susceptible to tipping over, especially in crowded environments, which could pose a challenge in high-traffic areas.
Hybrid

This hybrid design blends the friendly appearance of a humanoid robot with practical efficiency, resembling a large cartoon character. It is soft and approachable but still maintains a decent amount of storage space for waste. While its friendly look can make the robot more acceptable in public spaces, its larger storage capacity could make it bulkier than necessary, possibly affecting its mobility.
Interactive

This model incorporates a large display screen (in blue) that can serve multiple purposes. The screen can provide real-time navigation updates, such as indicating turns or upcoming cleaning areas, improving pedestrian awareness. Additionally, it can display a face or other visual elements to make the robot feel more engaging and approachable. While this design enhances communication with the public, the inclusion of a large screen could affect its durability and energy consumption.

Our final selection aims to strike the right balance between efficiency and public acceptance. Each of these models will be carefully evaluated using the following
Verification of design
To create these designs we used the feedback that we got from the interviewees, this is why we had to verify with those interviewees whether or not our designs are what they would indeed like to see in the city center, since we did not have the ability to actually create the robot and see their responses, we conducted a second round of interviews with the same people we interviewed the first time.
For this we sent out a survey since setting up in-person interviews with each person was not possible within the time we had left for this project. In this survey we asked them the following 2 questions about all 5 designs, with the pictures of the designs included:
- How much do you like this robot design? (I don't like it at all - Don't like it - Neutral - Like it - I like it a lot)
- Why do you feel that way about this design?
After these questions about each design, we showed all the designs together and asked the final question:
- Which 2 designs are your most proffered?

From this we verified if the used requirements collected from the interviews are actually being implemented well and which of the designs is the most liked among our interviewees.
In the last question both design 1 and design 4 got the highest, equal score of 62% of participants liking it. For this reason we had to find the most preferred design from the first questions. We calculated which design was the most preferred by giving each response like it a lot a score of 5, like it a score of 4, neutral a score of 3, don't like it a score of 2 and don't like it at all a score of 4 and then dividing the scores by the amount of responses. With this calculation we found that design 1 had a score of 3.46, design 2 had a score of 3.08, design 3 had a score of 2.08, design 4 had a score of 4.08 and design 5 had a score of 3.
This is why we decided that our final design should be design 4: the hybrid design. Some of the reasons our interviewees gave for liking this one was that it loked cute, that it was both easy to spot but not too big and that it looks familiar.
Mechanical design
List of components:
- Parts that can be bought:
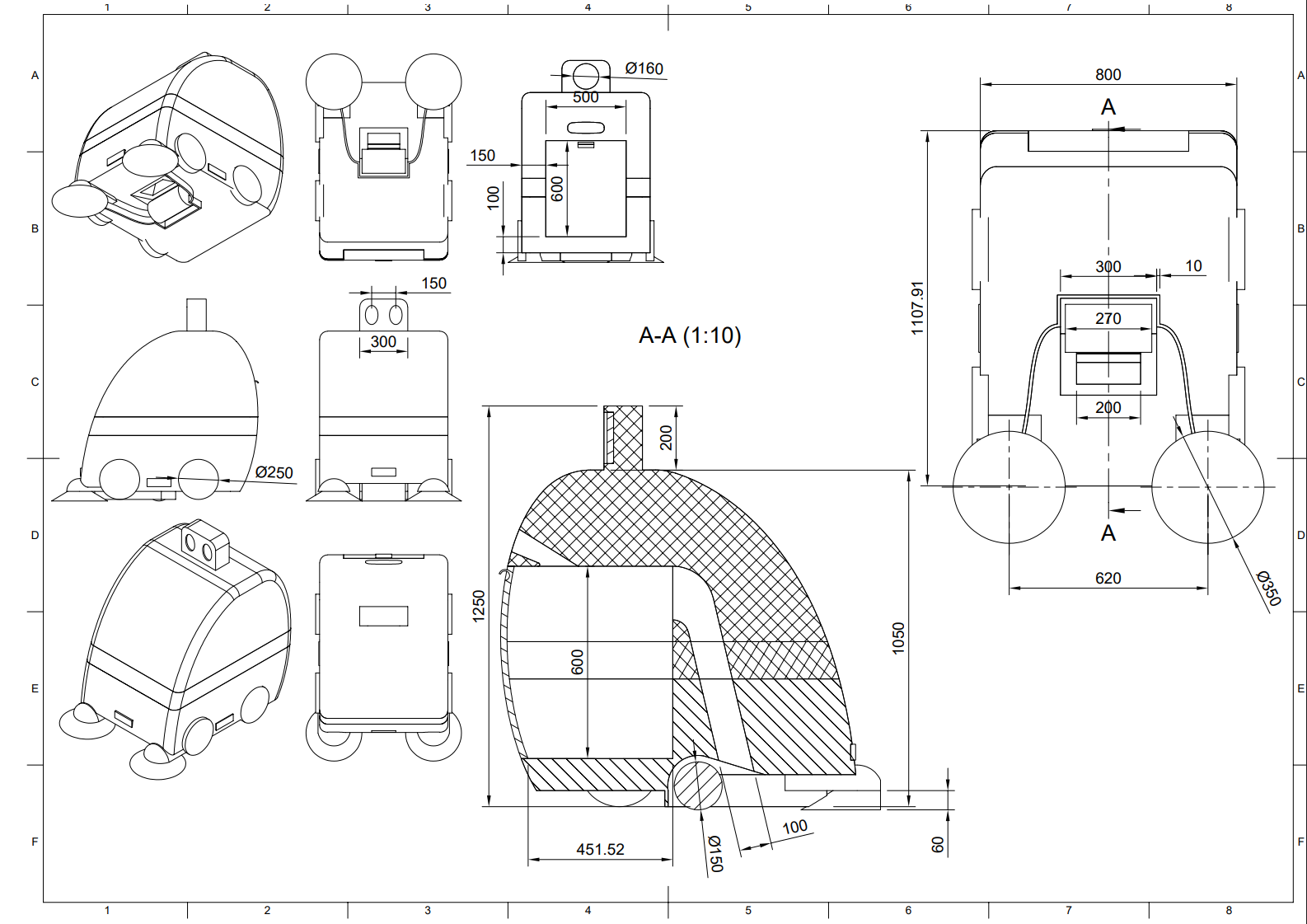
Blueprint of the final design of our robot - Control System: Raspberry Pi
- Battery: Any LiFePO4 battery with sufficient capacity to last a round trip. 2 x 12V 100Ah can be enough for 10h operation time and 200 m2/h of coverage
- Camera system: Intel® RealSense™ Depth Camera D435i
- Gutter brooms x2: Bortek industries [1] width: 35cm
- Central broom: Trombia central brush
- Debris-hopper (could also be built if none found in our size):
- Filters (for smell, potentially out of scope): Gausium Phantas Filtration Unit
- Motors: Bosch compact electric motors
- Parts that must be built:
- Rotating shaft with hammers (for trash compaction, out of scope)
- Vacuum channel, suction nozzle and debris-hopper (must be specific to the dimensions of robot)
- Frame and chassis: made out of sheet aluminum

other parts such as a dust filtration system, hydraulic system, automatic lubrication system are out of our scope.
The addressable RGB LED strip that wraps around the chassis of the robot (shown in blue on the render) allows the robot to provide its camera system with enough lighting, make itself visible and indicate its actions to the people around it. The robot does that similar to how regular road going vehicles indicate: blinking on the side when turning, making the back bright red for simulating break lights, blinking on both sides during a temporary stop, etc. This way it is intuitive for the people around to understand what the robot is doing from experience with vehicles on the road.


How Traditional Street Sweepers work

Understanding the operation of conventional, manned street sweepers is important in designing a street sweeper that is similar. These machines combine mechanical, pneumatic and hydraulic systems to efficiently remove waste from urban environments. The core function of all street sweepers is to collect dirt, dust, leaves, and litter from the surface of the road, then store it in an onboard hopper for later disposal.
Types of Street Sweeping Systems
There are three main types of street sweepers, categorized by how they collect debris:
- Mechanical Broom Sweepers
- These use rotating cylindrical brushes, usually located underneath the chassis, to dislodge and gather debris toward the center. Some systems have their brushes mounted on moving mechanical arms.
- The debris is then picked up by a conveyor system and transported into a debris hopper.
- Ideal for heavy or coarse material like gravel or sand.
- Vacuum (Suction) Sweepers
- Use powerful suction to pull debris through a nozzle positioned close to the ground.
- A fan system draws air through the nozzle, carrying trash and fine dust into a hopper.
- Often combined with water sprayers to prevent dust from lifting into the air.
- Regenerative Air Sweepers
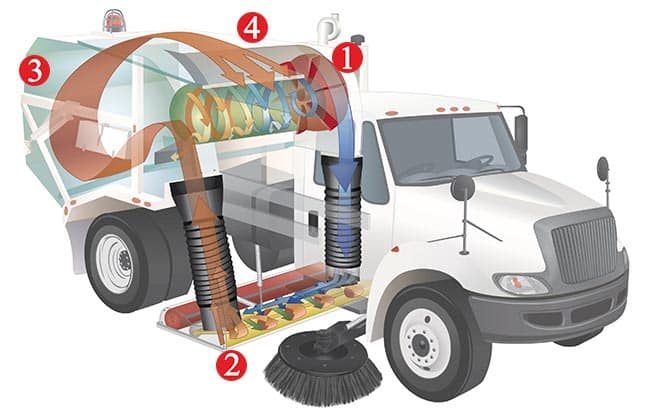
Airflow of regenerative air street sweeper system - These create a sealed vacuum beneath the vehicle using a blast of air and suction in a loop.
- Air is blown onto the ground to lift debris and is immediately sucked up, cleaned by filters, and reused.
- Efficient for both heavy and fine material, especially in dry or dusty climates.

Operation
- As the sweeper moves forward, side brushes sweep debris inward.
- The central brush / air duct gathers it beneath the chassis.
- Either a vacuum or conveyor moves debris into the hopper.
- Water spray is continuously applied to minimize airborne dust.
Conclusion
The research presented above gives a general overview of several aspects involving the design and implementation of an autonomous street cleaning robot. It delves into the physical design, and robot algorithm in trash collection and human interaction.
From the initial user interviews we concluded we found a majority of people would not mind a street cleaning robot, given it follows a set of constraints. With these constraints in mind we provided designs, and after a survey with different designs, a most successful design was picked and improved upon. This research shows signs that the general public can be welcoming towards autonomous trash cleaning robots, and provides readers with some insight as to what they are more open to in terms of design.
The algorithm section finds that in cases where the streets are not too busy, a trash cleaning robot following simple decision-making steps can outperform only doing cleaning once per 24 hours. It does show the cleaning is not perfect, especially in the case of very crowded streets. It should also be noted that the robot does cause some disturbance, especially when a street is crowded.
Overall, the presented research shows that autonomous cleaning robots can be a viable technology from both an efficiency- and a user-side, but leaves a lot of work to be done for implementation to actually be possible.
Reflection
The first idea for this project was to create a robot that cleans festival terrains after the guests have left. We quickly realized that this was not as much of a problem as we thought. After some research into how this is currently done, by giving people free tickets to the festival in exchange for having them clean the terrain, is already a good solution.
After that, we had the idea of a robot that cleans Eindhoven's Stratumseind, since we ourselves noticed that it is often very dirty there during the nights. We conducted interviews with some residents of Eindhoven and concluded that Stratumseind is often too crowded to fit such a robot, and that aggressive drunk people could become quite a big risk for the robot.
This led us to a street cleaning robot for the entire center of Eindhoven, throughout the day. We also concluded that this was a problem through interviews, and this problem was a lot easier to solve, as the peaks of people in entire center are less high then Stratumseind, however since there are still people there, we do need a good algorithm on how to interact with both the people and the trash as a basis. Also, for the people not to be to disturbed by the robot, both since it will improve their happiness in the center, and this would mean people will also most likely not disturb it. Therefore we focused on these two aspects on the creation of this robot.
Once we knew what we wanted to achieve exactly the project went a lot smoother and we were able to make a lot more progress each week and we are happy that we still managed to design a robot and an algorithm within the short period of time we had left.
Discussion and Further research
Parts left out of scope
The current project is only a touch on trash collecting robots, a lot of steps have to be done to build a working trash collecting robot. There are several aspect of the robot that were left out of scope of this project completely. Full inner construction of the robot has to be worked through, including vacuum system, filters and trash disposal system, the battery and charging system. A big topic of computer vision, capable of navigating in the environment reliably and distinguishing trash, was not touched as well. Developing such a system would be a big project on its own.
It won't be possible to create a fully autonomous trash collecting robot without developing an automatic trash emptying system. In the current project we assumed existence of such an emptying facility and didn't take this aspect into consideration during development of mechanical design. However, in a full scale project the robot outer and inner design should be also adjusted according to the needs of trash emptying mechanism.
The design process of this project was based on Eindhoven city center setup. The area of robot operation are fully pedestrian streets of Eindhoven city center. This simplifies the design process as the cars do not need to be taken into account, however many of the cities do not have completely car free areas. It can be further research how friendly the other cities are for a trash collecting robot. Presence of streets with cars would significantly complicate robot operation and create greater risks for robot to be hit by car.
Improving simulation
The aim of simulation was making the environment for trash collecting robot that is as close to real situation as the group could make. However, the developed simulation is definitely very far from representing the real world and implication from its results are not very strong. Several aspects can be improved.
- The human behavior is rather simplistic, they roughly walk along the street. It can be simulated that people go inside building, stand on a place in groups or try to interact with the robot. The whole topic of people interaction with robot is complicated and requires field studies of users to determine probable behavior of people when they see the robot.
- A complete robot path should be simulated for fuller picture. It would include turns and non-straight streets which the robot have to deal with accordingly. Also, in the current simulation setup the street is clean of any stationary obstacles. In real life there are trees, benches etc. which all will affect robot behavior.
- A more sophisticated robot algorithm could be developed as well. The current algorithm does incorporate people in the robot trajectory, it only changes the speed depending on proximity of people. A more advanced algorithm could dynamically choose a path that avoids approaching people by going around them. The problematic part is that people constantly move as well and such path finding algorithm would need to predict when people will be in the future and create path accordingly.
Different setups
From the interviews it was found that, even though people would prefer streets of Eindhoven be cleaner, most of respondents don't find Eindhoven a particularly dirty city. This reduces the chances that such complex project as autonomous trash cleaning robot will be implemented in Eindhoven. However, for cities with a worse trash situation there could be more incentive to invest a robotic solution.
It should be also critically noted that the trash collecting robot does not solve the root cause trash problem - people litter on streets - it only addresses the consequences by collecting trash on the streets. Introduction of a trash collecting robot might also cause unwanted effect - people could start littering more knowing that the litter will be cleaned soon after by a robot. Therefore, in the fight with trash problem, the preemptive methods, like social campaigns against littering, should be considered.
Worklog
| Week | Student | Work Done | Total Time |
|---|---|---|---|
| 1 | Julien | Brainstorm meeting and planning (2h), Wrote User and stakeholder study (1h) | 3h |
| Mihail | brainstorm meeting and planning (2h), described approach and planning of project (3h) | 5h | |
| Chantal | Introduction lecture (1h), brainstorm meeting and planning (2h), problem statement & objectives (1h) | 4h | |
| Danila | Introduction lecture (1h), brainstorm meeting and planning (2h), literature review (4h) | 7h | |
| Anbiya | brainstorm meeting and planning (2h), literature review (4h) | 6h | |
| 2 | Julien | group meeting (2h), taking pictures of stratum (1h) | 3h |
| Mihail | group meeting (2h), refined interview questions (1h) | 3h | |
| Chantal | group meeting (2h), write interview questions (1h) | 3h | |
| Danila | group meeting (2h) | 2h | |
| Anbiya | research into cleaning companies and email (1h) group meeting (2h) | 3h | |
| 3 | Julien | Group meeting (5h), Conducted interviews (3h), specify requirements (3h) | 11h |
| Mihail | group meetings (4h), redesigning the idea (3h), making new interview questions (1h),
Conduct interviews (3h), specific requirements (3h) |
14h | |
| Chantal | group meeting (4h) Conduct interviews (3h), extract user opinions from interviews (2h) | 9h | |
| Danila | group meeting (5h) interviews (1h) extending literature review (2h) safety features (1.5h) | 9.5h | |
| Anbiya | group meeting (4h), conduct interviews (2x1h), extracting user opinions from interviews (1.5h) | 7.5h | |
| 4 | Julien | Group meeting (2h), researched mechanical design and list components (5h),
reorganized user analysis (1h) |
8h |
| Mihail | Group meetings (2h), research on trash collection robots (1h), designing trash collection strategy (6h),
choosing simulation environment (1h) |
10h | |
| Chantal | Summarize interviews (4h), update introduction (1h), create assumptions list (1h), group meeting (2h) | 8h | |
| Danila | Group meeting (2h), research on workings of manned street sweepers (1h), research for components list (4h) | 7h | |
| Anbiya | Group meeting (2h), research existing trash collection (1h), analyze streets and write area description (4.5h) | 7.5h | |
| 5 | Julien | Group meeting (1h), Researcehd robot appearances and sketching/brainstorming appearances (short and wide, storage efficient and
tall and slim)(6h) |
7h |
| Mihail | Group meeting (1h), Rewriting the approach (2.5h), Algorithm (3h) was sick most of the week :( | 6.5h | |
| Chantal | Group meeting (1h), fixed first interviews (1h), wrote first draft of the reflection (1h) | 3h | |
| Danila | Group meeting (1h), research on existing cleaning robots (3h), started designing trash collection mechanism (1h), got very sick | 5h | |
| Anbiya | Group meeting (1h), Improve area description (1h), write movement specification based on interview answers (3h) | 5h | |
| 6 | Julien | Group meetings (3h), Made proper designs for all robot appearances (added Hybrid and Interactive designs)(5h), Briefly studied Mesa
and example projects for simulation (2h) |
10h |
| Mihail | Group meetings (3h), Writing the simulation (11h) | 14h | |
| Chantal | Group meetings (3h), made state machine diagram trash collection (2h), started on the presentation (3h),
read the wiki to find errors and fix them (1h), created 2nd interviews about design (2h), updated reflection (1h) |
12h | |
| Danila | Group meeting (2h), Research in existing mini street sweepers and cleaning robots (2h), started on chassis blueprint (1h), still sick | 5h | |
| Anbiya | Group meeting (2h), work on presentation (5h), | 7h | |
| 7 | Julien | Group meetings (3h), Writing simulation (9h), Presentation (1h) | 13h |
| Mihail | Group meetings (3h), Presentation (3h), Writing simulation (14h) | 20h | |
| Chantal | Group meetings (3h), Presentation (2h), Working on presentation (2h) | 7h | |
| Danila | Group meeting (2h), blueprint of robot (6h) Presentation (3h) | 11h | |
| Anbiya | Group meeting (2h), Finish up presentation (2.5h), presentation (3h), spellchecking and fixing style of entire wiki (4h) | 11.5h | |
| 8 | Julien | Group meeting(4h), writing simulation and verification(4h), final fixes of wiki(1h), generated plots for verification+reworking simulation(10h) | 19h |
| Mihail | Group meetings(4h), Writing about simulation in wiki (10h) | 14h | |
| Chantal | Group meetings (4h), Writing discussion (1h), Write verification (2h), final fixes of the wiki (1h) | 8h | |
| Danila | |||
| Anbiya | Group meetings (4h), writing conclusion (1h), final touchups to wiki (2h) | 5h |
Reference list
Sivasankar, G., Durgalakshmi, B., & Seyatha, K. (2017). Autonomous trash collecting robot. Int. J. Eng. Res, 6(04), 162-165. https://www.researchgate.net/publication/368142998_Autonomous_Trash_Collecting_Robot
Kulshreshtha, M., Chandra, S. S., Randhawa, P., Tsaramirsis, G., Khadidos, A., & Khadidos, A. O. (2021). OATCR: Outdoor autonomous trash-collecting robot design using YOLOv4-tiny. Electronics, 10(18), 2292. https://www.mdpi.com/2079-9292/10/18/2292/
S. S. Chandra, M. Kulshreshtha and P. Randhawa, "A Review of Trash Collecting and Cleaning Robots," 2021 9th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 2021, pp. 1-5, doi: 10.1109/ICRITO51393.2021.9596551. https://ieeexplore.ieee.org/abstract/document/9596551/
Othman, H., Petra, M. I., De Silva, L. C., & Caesarendra, W. (2020). Automated trash collector design. In Journal of Physics: Conference Series (Vol. 1444, No. 1, p. 012040). IOP Publishing. https://iopscience.iop.org/article/10.1088/1742-6596/1444/1/012040/meta/
Nagayo, A. M., Vikraman, B. P., Al Saidi, M. S., Al Hosni, A. S., Al Kharusi, A. K., & Jamisola, R. S. (2019). Autonomous trash collector robot with wireless charging system in a campus environment. https://repository.biust.ac.bw/handle/123456789/190/
Nayak, S., Hood, B., Allen, O., Foskey, C., Stevens, R., Kallal, E., ... & Schwartz, E. M. (2009). TailGator: Design and Development of Autonomous Trash collecting Robot. In Florida conference on recent advances in robotics (pp. 1-12). https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=8d437c479d06b461536c9284926b9688c2974a85/
John Paul Q. Tomas, Marlon Nathan D. Celis, Timothy Kyle B. Chan, and Jethro A. Flores. 2022. Trash Detection for Computer Vision using Scaled-YOLOv4 on Water Surface. In Proceedings of the 11th International Conference on Informatics, Environment, Energy and Applications (IEEA '22). Association for Computing Machinery, New York, NY, USA, 1–8. https://doi.org/10.1145/3533254.3533255/
Rad, M.S. et al. (2017). A Computer Vision System to Localize and Classify Wastes on the Streets. In: Liu, M., Chen, H., Vincze, M. (eds) Computer Vision Systems. ICVS 2017. Lecture Notes in Computer Science(), vol 10528. Springer, Cham. https://doi.org/10.1007/978-3-319-68345-4_18/
He, Y., Gu, Q., & Shi, M. (2020). Trash Classification Using Convolutional Neural Networks Project Category: Computer Vision. https://cs230.stanford.edu/projects_spring_2020/reports/38847029.pdf/
Yeaminul Islam, S.M., Alam, M.G.R. (2023). Computer Vision-Based Waste Detection and Classification for Garbage Management and Recycling. In: Hossain, M.S., Majumder, S.P., Siddique, N., Hossain, M.S. (eds) The Fourth Industrial Revolution and Beyond. Lecture Notes in Electrical Engineering, vol 980. Springer, Singapore. https://doi.org/10.1007/978-981-19-8032-9_28/
Akbari, Y., Almaadeed, N., Al-maadeed, S. et al. Applications, databases and open computer vision research from drone videos and images: a survey. Artif Intell Rev 54, 3887–3938 (2021). https://doi.org/10.1007/s10462-020-09943-1/
Jamil, S., Jalil Piran, M., & Kwon, O.-J. (2023). A Comprehensive Survey of Transformers for Computer Vision. Drones, 7(5), 287. https://doi.org/10.3390/drones7050287/
Matthew MacLeod et al. ,The global threat from plastic pollution. Science 373, 61-65 (2021). DOI: https://www.science.org/doi/10.1126/science.abg5433/
Hannah Ritchie, Veronika Samborska and Max Roser (2023) - “Plastic Pollution” Published online at OurWorldinData.org. Retrieved from: https://ourworldindata.org/plastic-pollution/
McDermott, Kristin L., "Plastic Pollution and the Global Throwaway Culture: Environmental Injustices of Single-use Plastic" (2016). ENV 434 Environmental Justice. 7. https://digitalcommons.salve.edu/env434_justice/7/
He, L., Ou, Z., Fan, J., Zeng, B., & Guan, W. (2022). Research on the non-point source pollution of microplastics. Frontiers in Chemistry, 10, 956547. https://www.frontiersin.org/journals/chemistry/articles/10.3389/fchem.2022.956547/full/
Fallahranjbar, N., Chen, H. H., & Dietrich, U. (2018). Environmental design and planning strategies to mitigate waste condition in nightlife zones: The case of Reeperbahn street, Hamburg, Germany. In WIT Transactions on The Built Environment (pp. 281-291). WIT Press. https://repos.hcu-hamburg.de/handle/hcu/796/
Becherucci, M. E., & Pon, J. P. S. (2014). What is left behind when the lights go off? Comparing the abundance and composition of litter in urban areas with different intensity of nightlife use in Mar del Plata, Argentina. Waste management, 34(8), 1351-1355. https://www.sciencedirect.com/science/article/abs/pii/S0956053X14000725/
Nidhin, G., Fonceca, C. M., & Raj, M. A. (2024). Nightlife and Environmental Consciousness: Perspectives of Young Adults in Chennai. NATURALISTA CAMPANO, 28(1), 1232-1243. https://museonaturalistico.it/index.php/journal/article/view/237/
Burlakovs, J., Jani, Y., Kriipsalu, M., Grinfelde, I., Pilecka, J., & Hogland, W. (2020, March). Implementation of new concepts in waste management in tourist metropolitan areas. In IOP Conference Series: Earth and Environmental Science (Vol. 471, No. 1, p. 012017). IOP Publishing. https://iopscience.iop.org/article/10.1088/1755-1315/471/1/012017/meta/
Adedeji, O., & Wang, Z. (2019). Intelligent waste classification system using deep learning convolutional neural network. Procedia Manufacturing, 35, 607-612. https://www.sciencedirect.com/science/article/pii/S2351978919307231/
Sarc, R., Curtis, A., Kandlbauer, L., Khodier, K., Lorber, K. E., & Pomberger, R. (2019). Digitalisation and intelligent robotics in value chain of circular economy oriented waste management–A review. Waste Management, 95, 476-492. https://www.sciencedirect.com/science/article/abs/pii/S0956053X19304234/
Satav, A.G., Kubade, S., Amrutkar, C. et al. A state-of-the-art review on robotics in waste sorting: scope and challenges. Int J Interact Des Manuf 17, 2789–2806 (2023). https://doi.org/10.1007/s12008-023-01320-w/
Mohan, S., & Moosafintavida, S. (2023). A Perspective of Autonomous Office Trash Collector Robot: The Research and Development in Field Robotics. Advances in Business Informatics empowered by AI & Intelligent Systems, 126. https://books.csmflpublications.com/wp-content/uploads/2023/03/9788195732203_preview_chapter_9.pdf/
Milburn, L., Chiaramonte, J., Fenton, J., & Padir, T. (2023). TRASH: Tandem Rover and Aerial Scrap Harvester. arXiv preprint arXiv:2301.01704. https://arxiv.org/abs/2301.01704/
Mohan, S., Moosafintavida, S. (2023). A Perspective of Autonomous Office Trash Collector Robot: The Research and Development in Field Robotics. In P.K. Paul, S. Sharma, E. Roy Krishnan (Eds.), Advances in Business Informatics empowered by AI & Intelligent Systems (pp 126-137). CSMFL Publications. https://dx.doi.org/10.46679/978819573220309/
Ballatore, A., Verhagen, T. J., Li, Z., & Cucurachi, S. (2021). This city is not a bin. https://www.researchgate.net/publication/352552322_This_city_is_not_a_bin_Crowdmapping_the_distribution_of_urban_litter
Amsterdam is planting mini-gardens around trash cans with hopes to cut littering. https://www.brightvibes.com/amsterdam-is-planting-mini-gardens-around-trash-cans-with-hopes-to-cut-littering/
EU Cities Litter Survey - Press Statement https://cleaneuropenetwork.eu/en/blog/eu-cities-litter-survey-press-statement-/awu/
A Rubbish Reality: Our litter problem and why it matters. https://www.keepbritaintidy.org/rubbish-reality-our-litter-problem-and-why-it-matter/
https://blog.comac.it/street-sweeper-guide/?lang=en
https://www.tymco.com/wp-content/themes/va/scripts/Overlay/how-it-works-frame.htm
Hall, E. T. (1959). The silent language. Doubleday.