Embedded Motion Control 2013 Group 1: Difference between revisions
| Line 243: | Line 243: | ||
The first distinction is the direction of a line. <br> | The first distinction is the direction of a line. <br> | ||
The line can be in the driving direction or perpendicular to the driving direction. <br> | The line can be in the driving direction or perpendicular to the driving direction. <br> | ||
===== | ===== In driving direction ===== | ||
Lines are indexed on base of it's position. <br> | Lines are indexed on base of it's position. <br> | ||
A line at the left side can be behind Pico, line-type L1, next to Pico, line type L2 or in front of Pico, Line type L3. <br> | A line at the left side can be behind Pico, line-type L1, next to Pico, line type L2 or in front of Pico, Line type L3. <br> | ||
For lines at the right it's the same except the line types are R1, R2 and R3. <br> | For lines at the right it's the same except the line types are R1, R2 and R3. <br> | ||
===== perpendicular to driving direction ====== | ===== perpendicular to driving direction ====== | ||
These lines are also indexed on base of it's position. <br> | These lines are also indexed on base of it's position. <br> | ||
Revision as of 20:36, 27 September 2013
Group Info
| Name: | Abbr: | Student id: | Email: |
| Groupmembers (email all) | |||
| Paul Raijmakers | PR | 0792801 | p.a.raijmakers@student.tue.nl |
| Pieter Aerts | PA | 0821027 | p.j.m.aerts@student.tue.nl |
| Wouter Geelen | WG | 0744855 | w.geelen@student.tue.nl |
| Frank Horstenbach | FH | 0792390 | f.g.h.hochstenbach@student.tue.nl |
| Niels Koenraad | NK | 0825990 | n.j.g.koenraad@student.tue.nl |
| Tutor | |||
| Jos Elfring | n.a. | n.a. | j.elfring@tue.nl |
Meetings
(Global) Planning
Week 1 (2013-09-02 - 2013-09-08)
- Installing Ubuntu 12.04
- Installing ROS Fuerte
- Following tutorials on C++ and ROS.
- Setup SVN
Week 2 (2013-09-09 - 2013-09-15)
- Discuss about splitting up the team by 2 groups (2,3) or 3 groups (2,2,1) to whom tasks can be appointed to.
- Create 2D map using the laser scanner.
- Start working on trying to detect walls with laser scanner.
- Start working on position control of Jazz (within walls i.e. riding straight ahead, turning i.e. 90 degrees).
- Start thinking about what kind of strategies we can use/implement to solve the maze (see usefull links).
Week 3 (2013-09-16 - 2013-09-22)
- Start work on trying to detect openings in walls.
- Start working on code for corridor competition.
- Continue thinking about maze solving strategy.
Week 4 (2013-09-23 - 2013-09-29)
- Decide which maze solving strategy we are going to use/implement.
Week 5 (2013-09-30 - 2013-10-06)
- To be determined.
Week 6 (2013-10-07 - 2013-10-13)
- To be determined.
Week 7 (2013-10-14 - 2013-10-20)
- To be determined.
Week 8 (2013-10-21 - 2013-10-27)
- To be determined.
Progress
Week 2
State diagram made of nodes Localisation and Situation
Software architecture

IO Data structures
| # | Datatype | Published by | Topic | Description |
| A | LaserScan | Pico | /pico/laser | Laser scan data. For info click here |
| B | Int32MultiArray | pico_line_detector | /pico/line_detector/lines | Every 4 elements represent a line element i.e. [x,y,x',y',...] with a maximum of n lines. Hence the array will at most contain 20 elements. The coordinates represent a line in the cartesian coordinate system with Pico being the center e.g. (0,0). The x- and y-axis in centimeters and the x-axis is in front/back of Pico while the y-axis is left/right. Further the coordinate system turns along with Pico. |
| C | Int32MultiArray | pico_line_detector | /pico/line_detector/lines | Every 4 elements represent a line element i.e. [x,y,x',y',...] with a maximum of n lines. Hence the array will at most contain 20 elements. The coordinates represent a line in the cartesian coordinate system with Pico being the center e.g. (0,0). The x- and y-axis in centimeters and the x-axis is in front/back of Pico while the y-axis is left/right. Further the coordinate system turns along with Pico. |
| D | Custom message (3x booleans, 1x Float32) | The 3 booleans represent possible driving directions at the upcoming desicion point. The float represents the distance to that waypoint | ||
| E | ||||
| F | Custom message (3x Float32) | first float is the average angle (in radians) between the 2 lines at the sides of pico. The second is the distance to the left hand detected line, the third is the distance to the right hand detected line | ||
| G | Custom message (2x Float32) |
Line detection
The pico_line_detection node is responsible for detecting lines with the laser scanner data from Pico. The node retrieves the laser data from the topic /pico/laser. The topic has a standard ROS sensor message datatype namely LaserScan. The datatype includes several variables of interest to us namely;

- float32 angle_min which is the start angle of the scan in radian
- float32 angle_max the end angle of the scan in radian
- float32 angle_increment the angular distance between measurements in radian
- float32[] ranges a array with every element being a range, in meters, for a measurement
Using the above data we can apply the probabilistic Hough line transform to detect lines. The detected lines are then published to the topic /pico/line_detector/lines.
Each line is represented by 2 points in the Cartesian coordinate system which is in centimeters. In the coordinate system Pico is located in the center i.e. at (0,0) and the world (coordinate system) moves along with Pico. The x-axis is defined to be front to back while the y-axis is defined to right to left.
Hough transform

The Hough transform is a algorithm which is able to extract features from e.g. a image or a set of points. The classical Hough transform is able to detect lines in a image. The generalized Hough transform is able to detect arbitrary shapes e.g. circles, ellipsoids. In our situation we are using the probabilistic Hough line transform. This algorithm is able to detect lines the same as the classical Hough transform as well as begin and end point of a line.
How it works. Lines can either be represented in the Cartesian coordinates or Polair coordinates. In the first they are represented in [math]\displaystyle{ y = ax + b\,\! }[/math], with [math]\displaystyle{ a\,\! }[/math] being the slope and [math]\displaystyle{ b\,\! }[/math] being the crossing in the y-axis of the line. Lines can however also be represented in Polair coordinates namely;
[math]\displaystyle{ y = \left(-{\cos\theta\over\sin\theta}\right)x + \left({r\over{\sin\theta}}\right) }[/math]
which can be rearranged to [math]\displaystyle{ r = x \cos \theta+y\sin \theta\,\! }[/math]. Now in general for each point [math]\displaystyle{ (x_i, y_i)\,\! }[/math], we can define a set of lines that goes through that point i.e. [math]\displaystyle{ r({\theta}) = x_i \cos \theta + y_i \sin \theta\,\! }[/math]. Hence the pair [math]\displaystyle{ (r,\theta)\,\! }[/math] represents each line that passes by [math]\displaystyle{ (x_i, y_i)\,\! }[/math]. The set of lines for a given point [math]\displaystyle{ (x_i, y_i)\,\! }[/math] can be plotted in the so called Hough space with [math]\displaystyle{ \theta\,\! }[/math] being the x-axis and [math]\displaystyle{ r\,\! }[/math] being the y-axis. For example the Hough space for the point [math]\displaystyle{ (x,y) \in \{(8,6)\} }[/math] looks as the image below on the left. The Hough space for the points [math]\displaystyle{ (x,y) \in \{(9,4),(12,3),(8,6)\} }[/math] looks as the image on the right.
 |
 |
The three plots intersect in one single point namely [math]\displaystyle{ (0.925,9.6)\,\! }[/math] these coordinates are the parameters [math]\displaystyle{ (\theta,r)\,\! }[/math] or the line in which [math]\displaystyle{ (x_{0}, y_{0})\,\! }[/math], [math]\displaystyle{ (x_{1}, y_{1})\,\! }[/math] and [math]\displaystyle{ (x_{2}, y_{2})\,\! }[/math] lay. Now we might conclude from this that at this point there is a line i.e. to find the lines one has to find the points in the Hough space with a number of intersections which is higher then a certain threshold. Finding these points in the Hough space can be computational heavy if not implemented correctly. However there exists very efficient divide and conquer algorithms for 2D peak finding e.g. see these course slides from MIT.
Psuedo algorithm
algorithm HoughTransform is
input: 2D matrix M
output: Set L lines with the pair (r,theta)
define 2D matrix A being the accumelator with size/resolution of theta and r
for each row in M do
for each column in M do
if M(row,column) above threshold
for each theta in (0,180) do
r ← row * cos(theta) + column * sin(theta)
increase A(theta,r)
look at boundary, the center row and the center column of A
p ← the global maximum within
if p is a peak do
add pair (row,column) to L
else
find larger neighbour
recurse in quadrant
return L
In action
Simulation
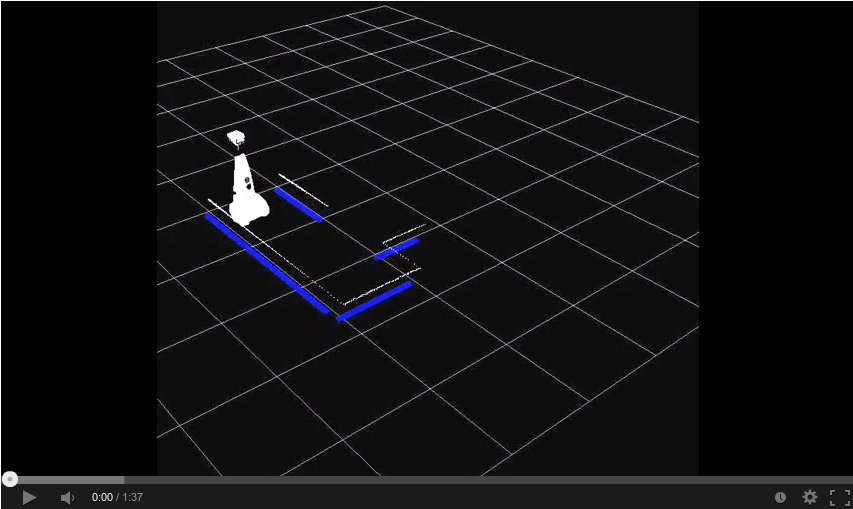
Practice
Situation
The situation node is used to detect different types of envriroment.
A few examples are a straight corridor, a side way to the left or a corner at the end of the corridor.
The Situation node first indexes all different types of lines it gets of the line detector.
The first distinction is the direction of a line.
The line can be in the driving direction or perpendicular to the driving direction.
In driving direction
Lines are indexed on base of it's position.
A line at the left side can be behind Pico, line-type L1, next to Pico, line type L2 or in front of Pico, Line type L3.
For lines at the right it's the same except the line types are R1, R2 and R3.
perpendicular to driving direction =
These lines are also indexed on base of it's position.
A line which is only located to the left of Pico is line-type SL, only to the right is of type SR.
If the line crosses the driving direction it is indexed as S0.
The next image makes the location of the different line-types clear.

After the lines are indexed the value of the 3 booleans is desided.
The following flowchart shows how the dessisons are made.

Localisation
Reasoning
Motion
Software development
Theory
include hough transform here
Usefull links / References
- Information about maze solving: http://en.wikipedia.org/wiki/Maze_solving_algorithm
- Nice java applet about Hough transform http://www.rob.cs.tu-bs.de/content/04-teaching/06-interactive/HNF.html
- OpenCV Hough transform tutorial http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/hough_lines/hough_lines.html