File:Map example.png
Size of this preview: 575 × 599 pixels. Other resolution: 682 × 711 pixels.
Original file (682 × 711 pixels, file size: 371 KB, MIME type: image/png)
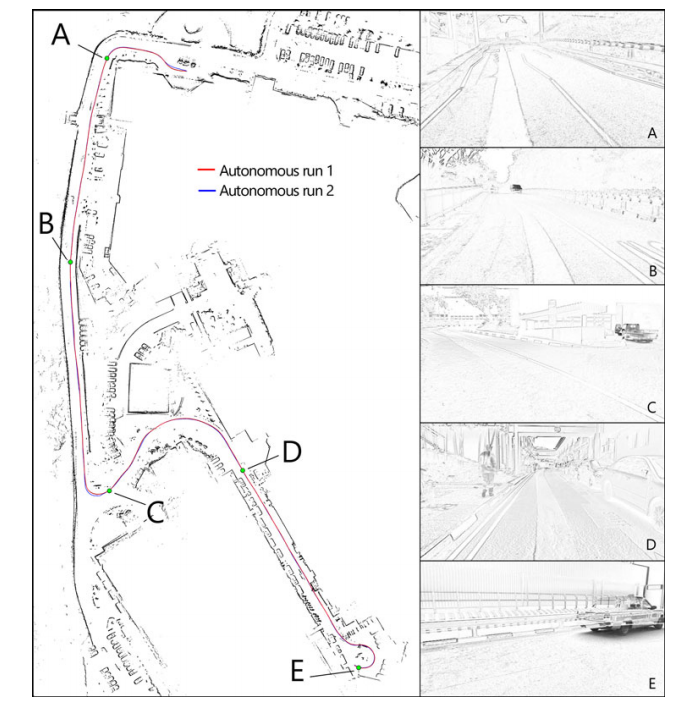
Example of visualization 2D mapping. Source: Z. J. Chong, B. Qin, T. Bandyopadhyay et al., “Synthetic 2D LIDAR for precise vehicle localization in 3D urban environment,” in IEEE International Conference on Robotics and Automation (ICRA), 2013, pp. 1554–1559.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:43, 18 February 2018 | | 682 × 711 (371 KB) | S148027 (talk | contribs) | Example of visualization 2D mapping. Source: Z. J. Chong, B. Qin, T. Bandyopadhyay et al., “Synthetic 2D LIDAR for precise vehicle localization in 3D urban environment,” in IEEE International Conference on Robotics and Automation (ICRA), 2013, pp. 155 |
You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}