Mobile Robot Control 2024 Wall-E
Group members:
| Name | student ID |
|---|---|
| Coen Smeets | 1615947 |
| Sven Balvers | 1889044 |
| Joris Janissen | 1588087 |
| Rens Leijtens | 1859382 |
| Tim de Wild | 1606565 |
| Niels Berkers | 1552929 |
Exercise 1
Instructions
- Create a folder called
exercise1in themrcfolder. Inside theexercise1folder, create ansrcfolder. Within thesrcfolder, create a new file calleddont_crash.cpp. - Add a
CMakeLists.txtfile to theexercise1folder and set it up to compile the executabledont_crash. - Q1: Think of a method to make the robot drive forward but stop before it hits something. Document your designed method on the wiki.
- Write code to implement your designed method. Test your code in the simulator. Once you are happy with the result, make sure to keep these files as we will need them later.
- Make a screen capture of your experiment in simulation and upload it to your wiki page.
Implementations:
Coen Smeets:
This section has been written with the following techniques. Firstly, I describe in rudimentary terms what should be in a paragraph and let Copilot convert it to Markdown, README.md file on git. This is then checked that it is still correct. Afterwards, I let copilot convert the Markdown to Mediawiki Markup for this page where I double check and manually change incorrect formatting. Is this method allowed within the course?
The provided C++ code is designed to prevent a robot from colliding with obstacles by using laser scan data and odometry data. Here's a step-by-step explanation of how it works:
- Initialization: The code starts by initializing the emc::IO object for input/output operations and the emc::Rate object to control the loop rate. It also initializes some variables for later use.
- Main Loop: The main part of the code is a loop that runs as long as the io.ok() function returns true. This function typically checks if the program should continue running, for example, if the user has requested to stop the program.
- Reading Data: In each iteration of the loop, the code reads new laser scan data and odometry data. If there's new data available, it processes this data.
- Processing Odometry Data: If there's new odometry data, the code calculates the linear velocity vx of the robot by dividing the change in position by the change in time. It also updates the timestamp of the last odometry data.
- Collision Detection: If there's new laser scan data, the code calls the collision_detection function, which checks if a collision is likely based on the laser scan data. If a collision is likely and the robot is moving forward (vx > 0.001), the code sends a command to the robot to stop moving. It also prints a message saying "Possible collision avoided!".
- Sleep: At the end of each iteration, the code sleeps for the remaining time to maintain the desired loop rate.
This code ensures that the robot stops moving when a collision is likely, thus preventing crashes.
Collision detection function
The collision_detection function is a crucial part of the collision avoidance code. It uses laser scan data to determine if a collision is likely. Here's a step-by-step explanation of how it works:
The collision_detection function is a crucial part of the collision avoidance code. It uses laser scan data to determine if a collision is likely. Here's a step-by-step explanation of how it works:
- Function Parameters: The function takes four parameters:
scan,angle_scan,distance_threshold, andverbose.scanis the laser scan data,angle_scanis the range of angles to consider for the collision detection (default is 1.7),distance_thresholdis the distance threshold for the collision detection (default is 0.18), andverboseis a boolean that controls whether the minimum value found in the scan data is printed (default is false). - Zero Index Calculation: The function starts by calculating the index of the laser scan that corresponds to an angle of 0 degrees. This is done by subtracting the minimum angle from 0 and dividing by the angle increment.
- Minimum Distance Calculation: The function then initializes a variable
min_valueto a large number. It loops over the laser scan data in the range of angles specified byangle_scan, and updatesmin_valueto the minimum distance it finds. - Verbose Output: If the
verboseparameter is true, the function prints the minimum value found in the scan data. - Collision Detection: Finally, the function checks if
min_valueis less thandistance_thresholdand within the valid range of distances (scan.range_mintoscan.range_max). If it is, the function returnstrue, indicating that a collision is likely. Otherwise, it returnsfalse.
This function is used in the main loop of the code to check if a collision is likely based on the current laser scan data. If a collision is likely, the code sends a command to the robot to stop moving, thus preventing a crash.
Potential improvements:
While the current collision detection system is effective, it is sensitive to outliers in the sensor data. This sensitivity can be problematic in real-world scenarios where sensor noise and random large outliers are common. Safety is about preparing for the worst-case scenario, and dealing with unreliable sensor data is a part of that. Here are a couple of potential improvements that could be made to the system:
- Rolling Average: One way to mitigate the impact of outliers is to use a rolling average of the sensor data instead of the raw data. This would smooth out the data and reduce the impact of any single outlier. However, this approach would also introduce a delay in the system's response to changes in the sensor data, which could be problematic in fast-moving scenarios.
- Simplifying Walls to Linear Lines: Given that the assignment specifies straight walls, another approach could be to simplify the walls to linear lines in the data processing. This would make the collision detection less sensitive to outliers in the sensor data. However, this approach assumes that the walls are perfectly straight and does not account for any irregularities or obstacles along the walls.
This process involves several steps that may not be immediately intuitive. Here's a breakdown:"- All walls in the restaurant will be approximately straight. No weird curving walls." [1](https://cstwiki.wtb.tue.nl/wiki/Mobile_Robot_Control_2024)
- Data Cleaning: Remove outliers from the data. These are individual data points where the sensor readings are clearly incorrect for a given time instance.
- Data Segmentation: Divide the data into groups based on the angle of the sensor readings. A group split should occur where there is a significant jump in the distance reading. This helps differentiate between unconnected walls.
- Corner Detection: Apply the Split-and-Merge algorithm to each wall. This helps identify corners within walls, which may not be detected by simply looking for large jumps in distance.
Keep in mind that the complexity of the scene can significantly impact the computation time of this algorithm. However, given the scenes shown on the wiki, the additional computation time required to generate clean lines should be minimal. This is because the number of walls is relatively small, and the algorithm can be optimized in several ways. For instance, instead of processing each data point, you could select a subset of evenly spaced points. On average, these selected points should accurately represent the average location of the wall.
Based on my experience, prioritizing safety enhancements in the system is crucial. Establishing a strong safety foundation from the outset is key. By implementing robust safety measures early in the development process, we can effectively mitigate potential risks and issues down the line.
Rens Leijtens
General structure
- including libraries
- main starts
- initialization of objects and variables
- while loop that is active while io.ok() is true
- the laser and odometry data is checked and processed
- the movement is enabled or disabled if necessary
The included libraries are the following:
- iostream for print to terminal
- emc/rate for fixed loop time
- emc/io for connecting with the simulated robot
Movement
The movement is controlled using a simple boolean called "move" which will move the robot if true and stop the robot if false.
Sensor data processing
Check if data is new
check if a measurement point is closer then 0.2 meters then the robot will stop moving.
Improvements
this method also measures the side notes which will not be optimal if the robot needs to pass trough a small hallway.
Niels Berkers:
The code uses the standard library header <iostream>, which is used when printing outputs to the terminal. Furthermore, the <emc/io.h> package provides the structures and functions to read data from the LiDar sensor and other hardware information needed for robot movement. Finally the package <emc/rate.h> is used to set the appropriate frequency for a while loop.
Implementation:
After the packages are included the main function is called, which starts by creating an IO object of the class IO and setting the frequency to 10 Hz. Afterwards, a while loop starts running that only breaks if the IO tools are not ok. Inside the while loop the reference velocity is set so that the robot drives forward with a velocity of 0.1. Afterwards, if new laser data is obtained, it loops over all indexes of the scan data and checks if the a range is within 0.3 meters. If that is the case, the reference velocity is set to 0 for all directions and thus the robot stops driving.
Improvements:
The code can be improved by only looking at a window that is in front of the robot. When this would be implemented, it would also be possible to drive parallel and close to a wall. This would also decrease the amount of indexes that need to be checked. The code can also be improved by sending out a signal when the robot is too close to a wall, which could be handy in a future and possibly bigger algorithm.
Joris Janissen:
Packages Used
emc/io.h: This package provides functionalities for interfacing with hardware, including reading laser and odometry data, and sending commands to control the robot's movement.emc/rate.h: This package enables control over the loop frequency, ensuring the code executes at a fixed rate.iostream: This package facilitates input/output operations, allowing for the printing of messages to the console.cmath: This package provides mathematical functions used in the implementation.
Implementation
- Initialization: The
main()function initializes the IO object, which initializes the input/output layer to interface with hardware, and creates a Rate object to control the loop frequency. - Data Processing: Within the main loop, the code reads new laser and odometry data from the robot. It then calculates the range of laser scan indices corresponding to a specified angle in front of the robot.
- Obstacle Detection: The code iterates over the laser scan data within the specified range. For each laser reading, it checks if the range value falls within the valid range and if it detects an obstacle within a certain stop distance threshold.
- Action: If an obstacle is detected within the stop distance threshold, the code sends a stop command to the robot and prints a message indicating the detected obstacle and its distance. Otherwise, if no obstacle is detected, the code sends a command to move the robot forward.
- Loop Control: The loop sleeps for a specified duration to maintain the desired loop frequency using the
r.sleep()function.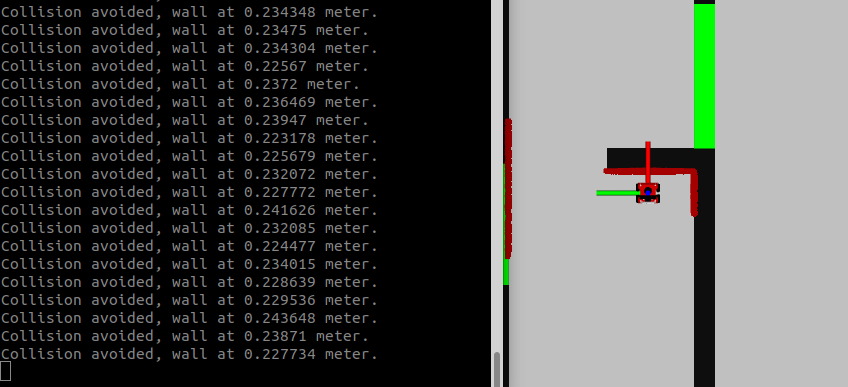

Improvements
- Data segmentation: The data points can be grouped to reduce computation time.
- Collision message: The collision message now spams the terminal, it can be improved to plot only once.
- Rolling average: The rolling average can be taken from the data points to filter out outliers or noise.
Conclusion
This documentation provides insights into the implementation of obstacle avoidance using laser scans in a robotic system. By leveraging the EMC library and appropriate data processing techniques, the robot can effectively detect obstacles in its path and navigate safely to avoid collisions, there are however some improvements.
Sven Balvers:
implementation:
Header Files: The code includes some header files (emc/io.h and emc/rate.h) which contain declarations for classes and functions used in the program, as well as the standard input-output stream header (iostream).
Main Function: The main() function serves as the entry point of the program.
Object Initialization: Inside main(), several objects of classes emc::IO, emc::LaserData, emc::OdometryData, and emc::Rate are declared. These objects are part of a framework for controlling a robot.
Loop: The program enters a while loop that runs as long as io.ok() returns true. This indicates that the I/O operations are functioning correctly, and thus is connected.
Control Commands: Within the loop, it seems to send a reference command to the robot's base at a fixed rate of 5 Hz using io.sendBaseReference(0.1, 0, 0). This command tells the robot to move forward at a certain velocity.
Data Reading: It reads laser data and odometry data from sensors attached to the robot using io.readLaserData(scan) and io.readOdometryData(odom).
Obstacle Detection: If new laser data or odometry data is available, it checks the laser scan data for any obstacles within a certain range (less than 0.3 units). If an obstacle is detected, it sends a stop command to the robot's base using io.sendBaseReference(0, 0, 0), setting the value of the speed to 0.
Rate Control: The loop sleeps for a fixed duration (r.sleep()) to maintain the specified loop rate.
Improvements:
To prevent the noise of the measurement data there are multiple approaches, we can take a moving average of the samples this will cause a delay of the data. We can also take point near one another to merge as one point and taking the average. Than there isn't a delay present.
Another improvement that can be made is to limit the vision of the robot to a certain angle and not the full range from -pi to +pi. This will ensure the robot is able to pass through a narrow hall, which is important for the final code.
Exercise 1 (practical)
You now know how to work with the robot. For your first session, we suggest you start by experimenting with the robot. Document the answers to these questions on your wiki.
Go to your folder on the robot and pull your software.
On the robot-laptop open rviz. Observe the laser data. How much noise is there on the laser? What objects can be seen by the laser? Which objects cannot? How do your own legs look like to the robot.
The noise of the signal from the robot's Lidar is difficult to quantify, as noticed during testing of "dont_crash" file. When the robot drives straight towards an object, it stops abruptly, but when it approaches a wall at a sharp angle, it stutters slightly. This happens because only a limited number of data points are obtained in such cases, making the noise on the sensor apparent. The robot can only see object at the hight of the Lidar. The Lidar has a distribution of measuring points spredding a sertain angle. Due to this, the Lidar can have problems detecting thin objects such as chair legs. Objects it can observe are flat surfaces. The robot's scanning capability doesn't cover a full 360 degrees around itself but instead sees a 180-degree angle centered at the front.
Take your example of don't crash and test it on the robot. Does it work like in simulation? Why? Why not? (choose the most promising version of don't crash that you have.)
See implementation Coen Smeets.
If necessary make changes to your code and test again. What changes did you have to make? Why? Was this something you could have found in simulation?
We modified the code so that the robot doesn't stop when it reaches a wall but instead turns left until it has enough space to resume driving. What's noticeable is that the robot starts and stops repeatedly because it can drive a short distance and then stops again. To prevent this, the robot should turn slightly longer to maintain continuous movement. We could see this in the simulation however we only created this code to try when we were there.
Take a video of the working robot and post it on your wiki.
Answers:
Artificial Potential Field
Background
Artificial Potential Field is to treat the robot's configuration as a point in a potential field that combines attraction to the goal, and repulsion from obstacles. The resulting trajectory is output as the path. This approach has advantages in that the trajectory is produced with little computation. However, they can become trapped in local minima of the potential field and fail to find a path, or can find a non-optimal path. The artificial potential fields can be treated as continuum equations similar to electrostatic potential fields (treating the robot like a point charge), or motion through the field can be discretized using a set of linguistic rules.[1] A navigation function[2] or a probabilistic navigation function[3] are sorts of artificial potential functions which have the quality of not having minimum points except the target point.
Simulation and testing videos
"Add simulation video" "Add video working on the robot"
Advantages
One of the main advantages is the simplicity of the algorithm. It can be implemented with straightforward mathematical functions. Another advantage is the robot will always avoid obstacles and drive in a smooth path (if it doesn't encounter a local minimum.
Disadvantages
The main disadvantage is that the robot can become stuck in a local minimum or in al local minimum loop and will not reach its end goal. The effectiveness of the method heavily depends on the tuning of parameters like the strength of the attractive and repulsive potentials. Improper tuning can lead to poor performance. The method relies on local information and does not inherently consider the global environment. This can result in sub optimal paths or failure to find a path in complex environments. But this is where the global path finding comes in to action.
Solutions
First, the robot should never get stuck in a local minimum if the global path finding is sufficiently robust. However, if this does occur, two solutions have been implemented. Firstly, if the robot remains in a local minimum for 5 seconds and its position does not change significantly, the driving force will gradually be increased to help the robot escape. The second solution implemented is the detection of a situation where the robot remains in a local minimum for 30 seconds. The robot will then indicate that it wants an alternative route to reach its destination. This is done because the environment is dynamic and cannot be fully predicted.
To implement the integration of local planning with global planning, the global planner provides a list of way points for the local planner to follow. As the robot approaches a way point on the list, it switches to the next point on the list until the robot reaches its final destination.
Dynamic Window Approach
To be added
Probabilistic Road Map
It must be noted that this section has been heavily influenced by Coen Smeets's BEP report. Ideas and abstracts have been taken from this report as it was written by a groupmember.[4]
Probabilistic Road Maps, henceforth noted as RPM, are a method of creating a network in which a dedicated algorithm can find the shortest route. In order to be a good network for the purpose of navigating a mobile robot, the network has to be a correct representation of the enviroment where safety is of importance; Edges between nodes are safe. There are several methods to create a network, however, Tsardoulias et al. (2016) compared several techniques to optimise path planning and concluded that space sampling methods are most effective in two-dimensional Occupancy grid map, OGM.[5] The data for the environment has been pre-parsed to an occupancy grid map by the course. Space sampling shows great success rate, small execution times and short paths without excessive turns.
For space sampling, the Halton sequence technique presented in Tsardoulias et al. (2016) has been adapted to create a network, G. The network is a simplified representation of the movable space in the OGM. The Halton sequence combines the advantages of random sampling and uniform sampling. In random sampling, every cell can be sampled independently of its location, ensuring an unbiased representation. On the other hand, uniform sampling ensures that the sampled points are evenly distributed. Therefore, the Halton sequence offers the benefits of both approaches simultaneously. The network will consist of nodes, the sampled points in the OGM, and links between nodes, possible paths. The Halton sequence has low discrepancy and thus appears random while being deterministic.[6] It samples the space quasi-randomly but with an even distribution. The space is sampled in 2D by using a sequence of bases 2 and 3. The higher the base the more computationally demanding the calculations are, thus, base three is chosen in the evaluation between evenly spreading the nodes and computational power.[6] The sequences are subsequently scaled to the space the OGM takes up by using the number of rows and columns for the x and y coordinates, respectively and with the use of the resolution of the map.
The created two-dimensional Halton sequence contains the possible locations of nodes within the OGM. However, each node is additionally checked to determine whether it is located within a cell that is considered free. This check is necessary as the area spanned by all free cells can still contain occupied cells. Nodes should also not be placed in free cells close to occupied cells where collisions between the robot and the obstruction still occur. Free cells close to occupied cells are found by 'inflating' the occupied cells. This process operates by iterating over each pixel in the map, and if the pixel is identified as part of an obstacle, it sets the surrounding pixels within a specified radius to also be part of the obstacle.
When all nodes are placed, edges are created between each node with specific rules to ensure safety and an efficient network. Firstly, each edge should not surpass a distance threshold. This is mostly to optimise the second rule's calculations where it states that each edge should not pass through an occupied cell. This safety rule is checked with the use of Bresenham's line algorithm. Bresenham's line algorithm is an efficient method used in computer graphics for drawing straight lines on a grid by minimizing the use of floating-point arithmetic and rounding errors.[7] Edges are only placed when they are safe and not unnecessarily long. An additional minimum threshold for the distance can be added but by the use of the Halton sequence, as explained above, a certain uniformness in distribution of the quasi-random points can be assumed.
Combining these principles of placing nodes and edges, create a coherent network in an environment expressed in an occupancy grid map. This network is subsequently used in the A* path planning algorithm.
A* path planning
Background
The A* (A-star) algorithm is a popular and widely used path finding and graph traversal algorithm. It is especially well-known for its use in applications such as AI in games, robotics, and GPS navigation systems. The A* algorithm combines the strengths of Dijkstra's algorithm [8] and Greedy Best-First-Search to efficiently find the shortest path between nodes in a graph. Staring form a specific node, it aims to find a path to the given goal node having the smallest cost. It does this by maintaining a tree of paths originating at the start node and extending those paths one edge at a time until the goal node is reached. At each iteration the algorithm needs to determine which part to extend. It does this by taking in to account the cost to come and the heuristic cost to go to the end node. The heuristic cost is can be different for different implementations of the algorithm, here however it is the absolute distance between the node that is being checked and the final node. It is important that the heuristic cost is never over estimated. The algorithm described so far gives us only the length of the shortest path. To find the actual sequence of steps, the algorithm can be easily revised so that each node on the path keeps track of its predecessor. After this algorithm is run, the ending node will point to its predecessor, and so on, until some node's predecessor is the start node.
More efficient note placement
A more efficient way of placing the nodes is to place nodes only in the corners where the robot would, or can change direction, this makes the graph easier to navigate due to the fewer points present. See figure below.
https://dsdwiki.wtb.tue.nl/images/Beter_node_placement.png
Is RPM for a maze efficient
It is not a good idea to use RPM for a maze since RPM is not well suited for narrow hallways. A maze is basically a network of only narrow hallways.
What would happen if the map updates?
If the map is updated, the robot will first attempt to follow the pre-determined path. If it encounters a local minimum and cannot proceed, the robot will request a new global route and continue from its current position.
Combining PRM with A*
To be added
Questions
Add answers of questions
1. How could finding the shortest path through the maze using the A* algorithm be made more efficient by placing the nodes differently? Sketch the small maze with the proposed nodes and the connections between them. Why would this be more efficient?
2. Would implementing PRM in a map like the maze be efficient?
3. What would change if the map suddenly changes (e.g. the map gets updated)?
4. How did you connect the local and global planner?
5. Test the combination of your local and global planner for a longer period of time on the real robot. What do you see that happens in terms of the calculated position of the robot? What is a way to solve this?
6. Run the A* algorithm using the gridmap (with the provided nodelist) and using the PRM. What do you observe? Comment on the advantage of using PRM in an open space.
Citations
- ↑ Wolf, J. C., Robinson, P., & Davies, J. M. (2004). Vector field path planning and control of an autonomous robot in a dynamic environment. In the Proceedings of the 2004 FIRA Robot World Congress (Paper 151).
- ↑ Lavalle, Steven, Planning Algorithms Chapter 8
- ↑ Hacohen, S., Shoval, S. & Shvalb, N. Probability Navigation Function for Stochastic Static Environments. Int. J. Control Autom. Syst. 17, 2097–2113 (2019). https://doi.org/10.1007/s12555-018-0563-2
- ↑ Smeets, C., (2023) Active Exploration with Occupancy Grid Mapping for a Mobile Robot. Bachelor’s final Project (2022-2023) DC2023.054 https://www.overleaf.com/read/vjscmwgpvkdn#47a804
- ↑ Tsardoulias, E. G., Iliakopoulou, A., Kargakos, A., & Petrou, L. (2016). A review of global path planning methods for occupancy grid maps regardless of obstacle density. Journal of Intelligent & Robotic Systems, 84(1–4), 829–858. https://doi.org/10.1007/s10846-016-0362-z
- ↑ 6.0 6.1 Halton, J. H. (1964). Algorithm 247: Radical-inverse quasi-random point sequence. Communications of the ACM, 7(12), 701–702. https://doi.org/10.1145/355588.365104
- ↑ Angel, E., & Morrison, D. (1991). Speeding up Bresenham’s algorithm. IEEE Computer Graphics and Applications, 11(6), 16–17. https://doi.org/10.1109/38.103388
- ↑ Dijkstra, E. W. (1959). A note on two problems in connexion with graphs. Numerische Mathematik, 1(1), 269–271.