Embedded Motion Control 2015 Group 2
Go back to the main page.
Group Members
| Name: | Student id: | Email: |
| Groupmembers (email all) | ||
| Wouter Kuijpers | 0864565 | w.j.p.kuijpers@student.tue.nl |
| Carel Wechgelaer | 0874762 | c.a.wechgelaer@student.tue.nl |
| Natalia Irigoyen | 0929175 | n.irigoyen.perdiguero@student.tue.nl |
| Stephanie Dávalos | 0925756 | s.davalos.segura@student.tue.nl |
| Georgi Hristov | 0931293 | g.s.hristov@student.tue.nl |
| Paul Padilla | 0926256 | g.p.padilla.cazar@student.tue.nl |
| Garbí Singla | 0932046 | G.Singla.Lezcano@tue.nl |
| Tutor | ||
| Luis Ferreira | n/a | L.F.Bento.Ferreira@tue.nl |
Initial Design
More information about the Initial Design can be found on the Intial Design-page. Here you can also find the Design Document and the Initial Presentation which was presented at 6th of May.
Corridor Competition
On the 13th of May 2015 the Corridor Competition was scheduled. Videos of our both attempts to reach the finish of the corridor can be viewed by clicking on the two pictures below
 |
 |
Analysis First Try
- Keeping Minimum Distance-algorithm: performs oké, an initial limit estimation was used ensuring that the robot keeps a safe distance to the wall.
- Turning: after making a 90 degree turn the coordinator presumably switched back to normal mode, then it saw a new end of the corridor on the left and wanted to turn immediately. In this case the coordinator had to be overwritten by first driving forward without the possibility of again turning.
Analysis Second Try
- Keeping Minimum Distance-algorithm: performs oké, an initial limit estimation was used ensuring that the robot keeps a safe distance to the wall.
- Turning: we do not know what went wrong here. So far we have also not succeeded recreating the same behavior in the simulator.
Lessons Learned
- A new algorithm is needed for keeping the minimum distance to the wall, this algorithm causes a large variation in the robot's orientation. In designing this new algorithm use can be made of the algorithm as a basis.
- A new algorithm is needed to detect possible turns or, in the real maze, intersections and T-junctions. In designing this new algorithm use can be made of the algorithm as a basis.
Composition Pattern
On the 27th of May the Composition Pattern presentation was given in the EMC lecture. In this presentation the (slightly revised) Task-Skill-Motion-framework was presented and the mapping from this to the Composition Pattern Hierarchy.
The slides of the presentation can be found here:
- Design Document - File:Presentation 27052015.pdf
Final Design
The Final Design will be presented aqui! The Final Presentation can be found at
- Final Presentation - File:EMC Gr2 FinalPresentation.pdf
(Mapping the Maze) Low-Level Feature Detection
(Mapping the Maze) Feature Detection
(Mapping the Maze) Robot Position

The main function of the Global Robot Positioning System (GRPS) is to provide the location of Special Situations after visiting them and "predict" the location of Special Situations when encountering one. The Global Position of Special Situations is of great importance in building a topological maze map. This functionality was fully integrated in a robotPosition-class in the C++-language. This class mainly contains the following elements, a more detailed explanation/description is given after this short one:
void robotPosition::initialDistance(emc::IO &io, emc::LaserData &scan);
// This method determines the distance to the next perpendicular wall.
void robotPosition::readyForCorner(emc::IO& io, emc::LaserData& scan);
// This method executes all the functionality when a Special Situation is detected for the first time.
bool robotPosition::Cornering(choices Direction, emc::IO& io, emc::LaserData& scan);
// This method is active when the robot is turning and keeps track of the robot's position during it.
// The choices Direction input specifies the direction we are turning to, Forward/Right/Back/Left
void robotPosition::CorneringFinished(choices Direction);
// This method executes after a corner has been completed. It makes sure that the LandMark is updated as well as PICO's own position.
Some remarks about definitions: a special situation is defined as being a: corner (both to left and right), X-junction, T-junction, Dead-End, U-Turn. In the function-names above Cornering is being used, this method actually refers to turning of the robot it activates whenever the robot is changing orientation. Also throughout the next explanation the term LandMark will be used to indicate the representation of a Special Situation in the Maze Map. The global position of the robot will be represented by a (x,y)-coordinate where the (positive) x-direction is oriented along the East and the (positive) y-direction is oriented along the North.
Detailed Explanation/Description
Now we will give a more detailed explanation/description of the Global Robot Positioning System (GRPS)-class, this will be done using following the robot throughout a sample maze presented in the picture to the left. Also the execution of the different methods in the RobotPosition-class is presented in the FlowChart to the right. The following functionality is executed during its execution
Position 1: The Robot is initialized at Position 1 where first the initialDistance-method determines the distance from Position 1 to the perpendicular wall in front of the robot which is denoted by A. We store this distance in StoredDistance. The Robot then starts driving, at some point it will reach
Position 2: The method readyForCorner-method will be triggered by the detection of a Special Situation. At this point the distance from Position 2 to the perpendicular wall (A) in front of the robot is determined and stored in LeftInCorridor. Knowing the orientation of the robot (which is North when starting by definition) we can find the current position of PICO by adding the distance
to the y-coordinate. E.g.: the robot starts at (0,0) facing North, if then StoredDistance = 5 [m] and after arriving at Position 2, we find LeftInCorridor = 1 [m], we know that Position 2 is located at (0,4) with PICO (still) facing North. As the distance from the mid-point of the Special Situation (which will be the Global Position stored in the LandMark) to the point where the Special Situation is detected Position 2 is quite constant we can now estimate the Global Position of the LandMark. (This is also represented at Position 6) E.g.: using the previous example and the fact that the distance from the mid-point of the Special Situation to the point where the Special Situation is detected is 1 [m], we estimate that the LandMark is at (0,5). Aside from estimating the global position of the LandMark, the readyForCorner-method also stores the odometry data in StoredOdometry of the robot at Position 2 is stored in method, the General Coordinator then starts the execution the Cornering at the Special Situation. Position 3: During turning the CurrentOdometry is compared to the StoredOdometry in the Cornering-method, if the orientation of the robot changed 90 degrees in the correct direction (turning left or right) the distance from Position 3 to the perpendicular wall (B) in front of the robot is determined and stored in StoredDistance. When the General Coordinator recognizes that the Special Situation has ended the CorneringFinished-method is ran. This method adds the difference
to the global position of the PICO robot. Also the position of the LandMark will be determined more precise (hence not an estimate anymore): in this case the x-coordinate determined before turning (Position 2) and the y-coordinate after turning (Position 3) will be used to form the global position of the LandMark will be stored in the Map. E.g.: using the previous examples and the fact that the difference [math]\displaystyle{ CurrentOdometry-StoredOdometry }[/math] is 1.5 [m] in both directions the LandMark position which will be saved will be (0,4+1.5) = (0,5.5).

- Once the robot detects the Special Situation of Wall b the algorithms executes from step 2 above. Note that after this first turn the orientation of the robot has changed, note that the distance [math]\displaystyle{ StoredDistance-LeftInCorridor, }[/math] will now be added to the x-coordinate. This change in orientation will also be applied to the estimate of the LandMark-position in step 3. This describes the algorithm when the robot changes orientation, note that there are three special cases: U-Turns (Position 4), Dead-Ends (Position 5) and Straight-On-Junction (Position 6), these will be explained below
Position 4: On approaching a U-Turn we can not yet detect whether it is a U-Turn, therefore the U-Turn algorithm starts when the Cornering-method recognizes a U-Turn because the robot turned more than 135 degrees and the General Coordinator still didn't signal the end of the Special Situation. At the moment of detecting the U-Turn the measurement of the distance to the next perpendicular wall, which was taken when the robot turned 90 degrees, is discarded. A new measurement is made when the robot turned 180 degrees and then when the General Coordinator signals that the Special Situation is finished, the CorneringFinished-method is ran.
Position 5: On approaching a Dead-End we know that the it is a dead-end (or a door), the Door Algorithms executes. After waiting some time we either have to turn around, the General Coordinator signals a 180-turn. The same algorithm as for turning is used but know making the measurement at 180 degrees and of course changing the orientation differently.
Position 6: It can also happen that we approach a T-(or X-)junction where we will go straight, in that case the junction has to be mapped anyway, in that case the estimate of the LandMark from the readyForCorner-method will be used. Then because we are driving straight the Cornering-method will not be triggered. Note that in this case we will not improve the location of the LandMark position as we do not turn on that junction.
Demonstration of Algorithm
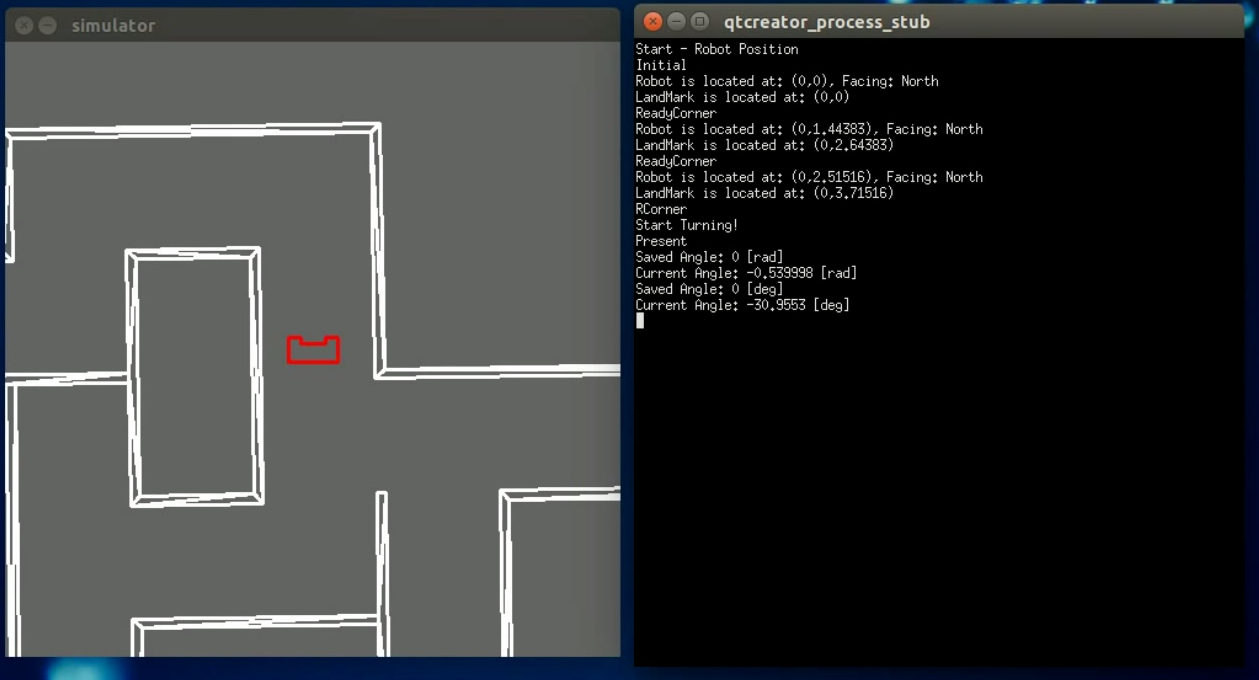
For a demonstration of the Global Robot Positioning System, click on the picture to the left. This will open a Youtube-Video (GRPS Demonstration) with a demonstration of the algorithm described above. To show the processing of the algorithm most clearly this test uses the teleoperation-tool for the simulator to drive PICO around, via the Qt-Creator terminal the Stimuli, normally provided by the General Coordinator, are provided by the user. The following commands are used:
- Initial: runs the 'initialDistance-method.
- ReadyCorner: runs the readyForCorner-method.
- LCorner: runs the readyForCorner-method with Direction left
- RCorner: runs the readyForCorner-method with Direction right
- DeadEnd: runs the readyForCorner-method with Direction back
- SpecSitFinished: runs the CorneringFinished-method.
- Present: presents the current angle and the saved angle from Odometry, this is used to position the robots in these simulations.
During the video constantly the Current LandMark and Robot Position are updated and printed in the Terminal interesting to see is the LandMark Position of the second junction encountered:
- Before the Loop the Junction is placed at: (0,3.53)
- After the Loop the Junction is found to be at: (-0.03,3.38), which is off 3 cm in x-direction and about 15 in y-direction
Note that in the video around 5.14 (min) that the algorithm is when coordinator doesn't give the right commands and the robot is moved when the correct methods aren't active, note however that this would have a severe effect on the Global Position of the robot if it was moved during this period.
The code of the methods explained here and the class definition of the GRPS is presented on robotPosition-Class
Maze Map
In our design we decided to build a semantic map using a topological tree structure. To achieve this, we store each special situation in the maze in an array structure with unique identifiers and characteristics. The array entry for a single special situation has the following information inside it :

where :
- ID - unique number of the map entry.
- N - Entity in the north part of the junction.
- E - Entity in the east part of the junction.
- S - Entity in the south part of the junction.
- W - Entity in the west part of the junction.
- All of the above four are with respect to the fixed, global coordinate frame.
- Possible states are 0 for wall, 1 for opening.
- been_here - Marker that shows whether this situation has already been encountered.
- Possible states are 0 for never been here, 1 for been here once and 2 for been here twice.
- came_facing - Direction the robot came from. Again with respect to the fixed global coordinate frame.
- locX - Coordinates in 'x' as received from the GRPS
- locY - Coordinates in 'y' as received from the GRPS
- last_decision - Last decision made at this junction with respect to previously in the array stated characteristic of the situation.
With this method, all important information about the maze is stored and a semantic map of the maze can be built as all the data is available at all times inside the mapping class, where the solver logic has access. Most of the information about each special situation is recorded initially when the DetectJunc function detects one. Inside that function, each opening detected is checked with respect to the robot's current heading and the openings are classified and stored at their accurate location in the array. Also a flag is raised for the solver if the junction has already been recorded before to help with algorithm adaptation.
The rest of the information about the junction is recorded after the situation is resolved and a decision is already made from the solver. A function called RecordJunction reads the decision made by the solver, which is in the form [math]\displaystyle{ \left[\begin{array}{c|c|c|c}F&R&B&L\end{array}\right] }[/math]. Then depending on the direction taken, the current heading of the robot is recalculated with respect to the global frame by the following function, where the numbers 1, 2, 3, 4 denote North, East, South, West respectively :
// Forward drive (N)
if (decision.F == 1){
facing = facing;
}
// Clockwise turn (E)
if (decision.R == 1){
facing += 1;
};
// Anticlockwise turn (W)
if (decision.L == 1){
facing -= 1;
};
// 180 turn (S)
if (decision.B == 1){
facing += 2;
};
// Recalibration
if (facing < 1) {
facing = 4;
}
if (facing > 4) {
facing = 1;
}
|}
Note that the initial heading and global frame assignment are done at the beginning with North being PICO's starting direction. Finally the rest of the array is filled up - coordinates of the junction from the GRPS, decision which was just made and the value of been_here being incremented to make sure next time this junction is reached a different decision will be taken to avoid loops.
Solving the Maze
Global Coordinator

The working of the General Coordinator is described in the flowchart given in the figure on the left.
First, the robot is initializing his parameters. Also the robots position is initialized. Then, the robot is reading the Laser Range Finder (LRF) data, which is first checked on safety. If the robot is too close to a wall, the safety limit is breached and the robot moves backwards for 2 seconds before it continues with solving the maze.
If safety is not breached, the robot is driving forward until a ‘Special situation’ occurs. A special situation is defined as a corner, T- or X-junction, a possible door and an open space. If a corner occurs, the navigation of the robot makes the turn. When the turn is completed, the robot first checks if the corner was a U-turn. Then, the mapping updates the world map and the global position and the facing, e.g. north, west, south, east, of the robot.
Another option is that there is a T- or X-junction. In this case, the solving algorithm is used to determined which path to take. After the decision is made, the robot completes the action. The mapping updates the world map and robot positioning afterwords to keep track of all paths taken.
It is also possible that a dead-end or a possible door in a straight corridor occurs. For both situations, the possible door has to be checked. Therefore, the robot has to stop and send an acoustic signal to request the door to open. Finally, after waiting for 7 seconds after the request is send, the door can be evaluated. If the possible door opens, the robot has to go through the door and update his mapping. If the door stays closed, mapping is done to prevent checking the door twice. Then, the robot continues forward for a possible door in a straight corridor. If the closed door was in a dead end, the robot rotates 180 degrees and continues forward.
The last situation is the open space. For the open space situation, the range of the LRF is increased to detect walls at every moment. Then, the target of the potential field can also be set and navigation can still perform his actions. When the open space is completed, the range is reset to his original value.
Maze Challenge
On the 17th of June 2015 the Maze Challenge was scheduled. The maze which has to be solved is shown in the pictures below.
 |
 |
Videos of our both attempts to reach the end of the maze can be viewed by clicking on the two pictures below
 |
 |
Analysis First Try
- The code we used was adjusted at many places without testing. Therefore, the robot made wrong decisions at some points. In the beginning the robot already had a collision with a wall. But after the collision, the safety algorithm made the robot to drive backwards and continue the maze challenge. Then, at the T-junction with the door, the robot chose to go forward, which was also implemented in our algorithm of the solving. Then, when the robot did the T-junction for the second time, the dead end was not recognized and therefore, a possible door was not checked.
Analysis Second Try
- For the second try, the code of the test time, the day before, is used. As there were some bugs in there, the robot was not able to take the turn and proceed to the open space. Therefore, the robot was making loops. At the X-junction, the potential field placed the target at the wrong point which leaded to a turn of 360 degrees.
- In the end, our team thinks that the code of our first trial was able to perform the maze challenge successfully when the door is open. Unfortunately, during the maze challenge, we chose for the safe version.
Conclusions & Lessons Learned
Here we will summarize our Conclusions and the Lessons we have learned:
- Decoupling is Important!: we reckon it impossible to work with 7 people on one piece of software which is not properly decoupled. We think the time we spend in carefully designing the software as decoupled as possible is very valuable and allowed us to work more efficiently.
- Coordination at Different Levels!: in the actual software one General Coordinator is controlling almost the full software (except for Navigation, where there is the Potential Field Coordinator). Whereas in the Composition Pattern-presentation we presented that we would also have a Mapping Coordinator (read: Mapping Functional Composite Entity with Mapping Coordinator); this one was, due to lack of time, not implemented. Looking back we think that if we would have implemented this coordinator earlier the software of the General Coordinator would be more easy, which would also greatly improve the structure of the total software.
- Start Easy!: we think that we started to early on programming high-level functionality (solving algorithms, Global Robot Positioning System,...) while low-level functionality (navigation, low-level feature detection,...) were not working robustly enough.
- GIT is Inevitable!: as nobody of us knew how to work with GIT we used Dropbox throughout a large part of the project. In the end Dropbox however gave problems when suddenly many versions of differently algorithms were published in a high pace. Spend time in getting to know how to work with GIT in software-projects of this size it is Inevitable!
- Make most efficient use of Time-Limited Resources!: we learned that for example test time on the PICO robot is extremely valuable, use this as efficient as possible; we have learned a lot in this area. We also experienced the meetings with our Tutor as extremely valuable. We have taken great care to make sure these Tutor-meetings were as effective possible: getting feedback, presenting new ideas and discussing them; we have made sure (using agenda's and minutes) that before each meeting we knew what we had to discuss.
- Step Back and Get Overview!: in the end we think that we should have taken a step back more often; take a step back, look at the full project again and then look at the things you are doing. Maybe in some points we have stared blind on some pieces of software trying to get them to work while the concept might not have been the best to use.
- Leadership is Required!: to make sure Team-meetings and Tutor-meetings are planned (agendas, location, notes, presentations) one person has to execute these tasks, reserve time for this as these meetings are valuable.
- Embedded Motion Control: we have all experienced the course as being "one-of-a-kind" within the department of Mechanical Engineering and as extremely useful and interesting. The course not only increases your knowledge about programming of Robotic Systems itself but also on how to work in teams on one piece of Software.