Mobile Robot Control 2024 Ultron:Solution 2
From Control Systems Technology Group
Revision as of 11:12, 30 April 2024 by
N.zhu@student.tue.nl
(
talk
|
contribs
)
(solution for exercise 2)
(diff) ← Older revision |
Latest revision
(
diff
) |
Newer revision →
(
diff
)
Jump to navigation
Jump to search
Exercise2
Hao
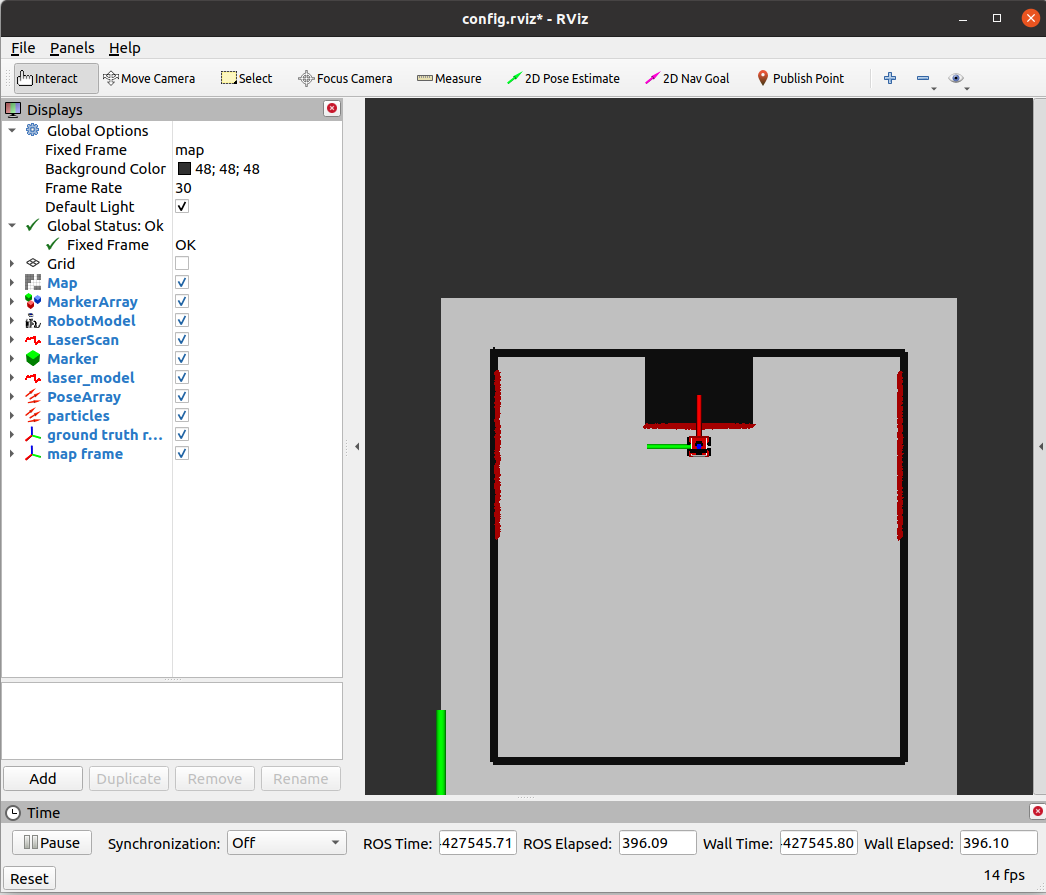
In map1 the robot can stop as the designed purpose.
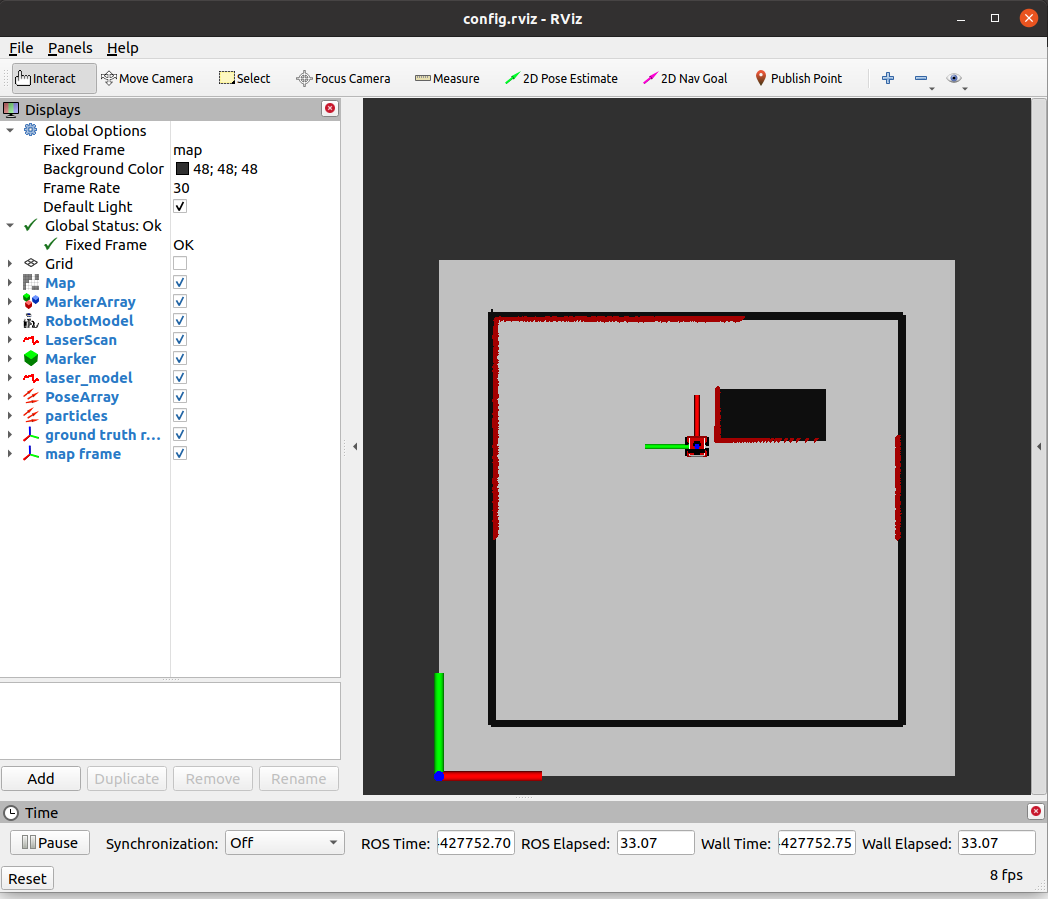
In map2 the robot stopped when detected the wall on the right side with distance<=0.2
Navigation menu
Personal tools
Log in
Namespaces
Page
Discussion
English
Views
Read
View source
View history
More
Search
Navigation
Main page
Projects
Recent changes
Random page
Help
Tools
What links here
Related changes
Special pages
Printable version
Permanent link
Page information