PRE2018 4 Group6
Group members
| Name | Student ID | Department |
|---|---|---|
| Tom Vredenbregt | 1221775 | Applied Physics |
| Jur Kappé | 1252895 | Applied Physics |
| Jannes van Poppelen | 1238120 | Applied Physics |
| Yannick de Jong | 1250663 | Applied Physics |
| Thom Smits | 1227659 | Applied Physics |
Organizational Matters
Task division & Planning
Minutes
Throughout the course the group will have official meetings. A summary (minute) of what has been said/achieved in every meeting will be made. These summaries can be found here.
Agendas
Like the minutes, the agendas made by the chair will be published. The agendas for the meetings can be found here.
Problem statement
The implementation of smart traffic lights in big cities reduces the travel time substantially. Whilst this makes the traffic flow more efficiently in the cities, a different solution has to be found to improve the traffic flow on highways. The ever increasing amount of traffic jams during the rush hours in the Netherlands(https://www.anwb.nl/verkeer/nieuws/nederland/2019/april/lichte-filegroei-in-eerste-kwartaal) is a call to arms to find solutions to this time-consuming phenomenon known as traffic congestion. One of these solutions is the routing of navigation systems that changes based on the activity on the highways. Traffic jams would be avoided by rerouting the navigation to go around the traffic jams, should it be the faster alternative. Of course, this solution is one of many, and it will contribute minimally on its own to the general problem. A different potential solution could be to simply add more lanes to each highway. Not only would this be very excessive outside of the rush hours, but it also would not be very cost- nor time efficient. For this reason, we propose to look for a solution in which we would optimize and change the current highways to a state in which it can, in fact, improve traffic flow in general. This solution we are proposing is the so-called "smart road". These lanes will adapt dynamically to the activity of both sides of the highway, as will be clarified visually later on. During morning rush hours, lanes highways towards big cities are usually very busy, whereas the lanes on the opposite side aren't that busy at all. Being able to distribute the lanes such that both sides would have a sufficient amount of lanes would benefit the traffic flow. The opposite directions would apply for evening peak hours. This solution would not only improve the traffic flow on highways during rush hours, but it would serve as a basis for the traffic flow outside of the rush hours. Coincidentally, this would also substantially reduce the emission that cars produce in traffic jams by continuously stopping and driving off. Central to this problem would be to research the question: Is the introduction of "smart roads" on the Dutch highways a viable solution to traffic congestion on Dutch highways?
Approach
Producing an actual prototype for a smart road in 8 weeks seems rather unlikely. Instead, the problem will be tackled by literature analysis, as well as a simulation of a smart road using a mathematically developed model. The final product for the project would, therefore, be a combination of a report about the literature analysis, together with the analyzed simulation of the smart road.
The literature analysis will include the USE aspects of the selected problem and an analysis of the present state of smart roads. In-depth analyses for user, society and enterprise stakeholders will be made. Since smart roads are designed to accommodate the users' needs, the focus will be on the user, its needs, and how to satisfy them.
The simulation of the smart road will be constructed using a mathematical model. Central in this mathematical model is a constructed norm which determines the orientation of the smart road. This norm is based on lane occupation on each side of the highway, as well as the time of the day to account for the rush hours. Whenever this norm is exceeded, the smart road will change in such a way that this norm is no longer exceeded. There is a couple of things that need to be accounted for in the simulation. One of which is the possibility of accidentally ending up on the wrong side of the highway as a result of the smart road adapting to its surroundings.
State-of-the-Art (Literature Study)
Evaluation of a movable barrier concrete system
- This report reviews the cost, safety, and effectiveness of a movable barrier system used on highways. This system is not used for our specific use case (creating a flexible and reconfigurable road) but is used for road maintenance. The report analyses specific traffic accidents involving this system, as well as the advantages and disadvantages of the system overall. Eventually, the report states that the system performs adequately in the use case as described in the report.
Moveable Barrier Solves Work-Zone Dilemma
- This article describes a movable barrier system used temporarily during the renovation of a bridge. In this instance three lanes are used, where the middle lane is used based on traffic needs. It also highlights the advantages and disadvantages of this and other types of systems.
Rough description of the USE stakeholders
In the case of smart roads, the following stakeholders in the USE frame can be defined. The stakeholders in the case of smart roads are:
Users
- Commuters (people who use the roads to go from their residence to their work)
- Leisure traffic (people who use the road for travels to the vacation or a day out)
- Public transport (as example buses and taxis)
- Residents living next to the roads (requirement: good traffic flow for a minimum noise problem)
Societity
- Government (the Dutch government is responsible for the maintenance and construction of the roads)
- Rijkswaterstaat
- Environment action groups
Enterprise
- Transport (transport of goods with use of lorries or other heavy traffic)
- Rijkswaterstaat (the active maintenance of the roads)
Requirements
The defined stakeholders and users in the list above have certain requirements in the case of smart roads. The requirements for each stakeholder can be found in the list below.
USERS
Commuters -> Commuters need well-maintained roads with enough lanes such they roads won't get jammed at rush-hour. Commuters use the roads to get to work. In the case that the roads get jammed, the commuters will be late on work or have to depart much earlier. But options are temporary, so the requirements for commuters are well accessible well-maintained roads which won't get jammed at rush-hour (between 07:00-09:00 and 17:00-19:00).
Leisure traffic -> Leisure traffic is traffic which uses the roads for pleasure purposes. The requirements for leisure traffic is the same as the requirements for commuters. The only difference is when the roads are needed. For leisure traffic, the roads need to be accessible around the weekends and vacation days.
Public transport Again the requirements are the same as the requirements mentioned above.
To conclude the requirements for the USER stakeholders are in general the same. The requirements for the USER are well accessible and well-maintained roads.
Society
Goverment -> Because roads are constructed from taxes money, is it key to keep it as cost efficient as possible. Another requirement for the government is that roads are well-useable. (ik heb echt geen idee)
Environment action groups -> These groups are fighting for less emission which is better for the milieu. This can be obtained by fewer cars on the (which isn't likely to happen) or better traffic flow such that there is less emission.
Enterprise
Transport traffic -> The requirements for transport traffic are well-maintained and accessible roads. An important note is that an important requirement for transport traffic is that it won't bother other road users. If transport traffic bothers road users, then the requirements of the above-mentioned users become in danger.
Rijkswaterstaat -> The requirements of for the maintenance of the road (rijkswaterstaat is responsible for the maintenance) is that the smart won't be too expansive to construct and not too expansive to maintain. So it is a requirement to keep the smart roads as simple as possible. If the smart road is simple, then maintance and the construction is in the scope of the construction workers.
Exact description of the USE stakeholders
As described in the section above ("rough description of the USE stakeholders") there are many groups of stakeholders which use the road. In this section, there is a better description and clarification of the defined stakeholders. The determined stakeholders are based on the sources about the chosen road and on defined stakeholders in section "rough description of the USE stakeholders". The percentages of the road users can be seen in figure (nog toevoegen).
Stakeholder
The first major stakeholders are commuters. Commuters are people who have to travel their living place to their workplace. Form the literature (bron toevoegen) it can be seen that (gekozen weg) is the connection between Amsterdam and the rest of the Netherlands. So it can be concluded that between 07:00 - 09:00 and from Monday up to and including Friday the road would be mainly used in the direction of Amsterdam (bron tegen aan gooien). The second important time period commuters use the road is around 17:00-19:00 on the same days. In this period most commuters will travel away from Amsterdam. As can be seen in the literature, the traffic jam (spits) causes by commuters is solvable through a simple solution (as for example an extra lane with gates at both ends). By designing the "'smart road" it is advisable to take these solutions into account. It is also advised to not defined the commuters as the main stakeholders by designing the "smart roads"
The second major stakeholders are traffic caused by transport. As can be seen in the literature the most common form of transport traffic is (heb hier bronnen voor nodig).
The third group of stakeholders are public transport. For the "smart road" public transport can be divided into two groups: scheduled transport, unscheduled transport. The first group (scheduled transport) is the larges group. The first group is the easiest in the problem of "smart roads", because of the schedule it easy to takes these into account. Secondly, public transport (like busses) are divided on the road. Because of the schedule of buses, it shouldn't be that multiple busses are presented at the same location at the same time. These two arguments based on the schedule it can be concluded scheduled public transport would not be the main focus by designing "smart roads". The second group is a negligible small group.
An important group of stakeholders are the people going on vacation. Here we have "heavy" vacation traffic and "light" vacation, here "heavy" vacation traffic are caravans and motorhomes. The "light" vacation traffic is the remaining vacation traffic. Because (gekozen weg) has a speed limit of 130 km/h "heavy" vacation traffic has a speed limit of at most 90 km/h. This speed is substantially different. In the case that a large group of "heavy" vacation traffic is going on the road at the same time (as for an example the dutch "zwarte vrijdag"), the road can get clogged. Vacations days are planned, this makes it possible to make a rough estimation. A possible case is that a large group of "heavy" vacation traffic and "light" vacation going on the road at an unpredictable time. By designing the "smart roads" vacation traffic is an important group to look at.
Least important stakeholder is the government. The Dutch government is responsible for maintaining and to construct the roads. It is important to take into account that the designed solution is not too expansive and not to technology hard to maintain. A too expansive "smart road" is not a feasible solution. An expansive "smart road" is possible for small local roads, but not for roads of large highways. For this research, it is looked at (gekozen weg) and the possibility of implementing the "smart road" on comparable roads. Secondly, the roads are paid form tax money. Impossible expansive roads would cost the taxpayer too much, such that the taxpayer would not accept it.
For the maintenance of the roads is Rijkswaterstaat. A road which is completely based on technology would require highly skilled maintenance staff (which again would be expansive to obtain). Also, the maintenance of the road would take a lot of time. At the moment road maintenance is (note this is a heavy simplified view) depositing concrete and painting the road stripes. When technology is heavy blended with technology, it would require a lot more preparation time (determining where what is) and more refined work. Form this is important that the "smart road" is designed such that it isn't technological to difficult.
Driver analysis
To simulate a road with traffic, a general idea of a basic human driver has to be implemented in code. In this simulation, it is assumed that everybody has an average response time with a slight (random) deviation each time. This response time is set to 1.4 seconds which is the 90th percentile according to this figure:

The random deviation that is taken is between -0.3 and 0.3 seconds, resulting in a final response time between 1.1 and 1.9 seconds
Improving traffic flow
Several concepts could be implemented to improve traffic flow on highways. Some are dynamic, meaning that the lane division of the road will change with the amount of vehicles on each side of the road, whereas other are stationary, thus will not the change the lane division, and don't exhibit any kind of element a smart road would have. Several of these concepts will be analysed below. This analysis will provide a basis for the quality of each concept (to what extent the concept actually solves the problem). Moreover, it will also demonstrate that our selected option is the most viable one around.
Carpool lanes
Carpool lanes (also sometimes called HOV-lanes) have already been around for a long time. They originate from the United States and Canada, but have also been present in Europe for quite a while (A1 Highway Netherlands, 1993). Their purpose is to minimize traffic congestion by allowing an extra lane for cars having multiple passengers. With the introduction of carpool lanes was also the intention to reduce the distance travelled by vehicles and thus minimize air pollution. It does not change the lane distribution, but instead adds an extra lane. It therefore would be a stationary solution to the main problem. 
Figure ... Current day carpool lane on a busy interstate in the United States.
Since it has been around for quite some time we will not have to speculate about its effictiveness. The introduction of carpool lanes in the United States was said to reduce traffic congestion, but to what extent is this actually the case? Analysis of traffic data obtained in California disproves the claim [21]. Whilst this is just one example, it certainly is not the only one. First and probably most crucial is the fact that carpool lanes are heavily underutilized. Traffic flow and lane capacity during peak hours(the amount of vehicles passing a detector per hour per lane) is substantially lower than what is promoted. California Department of Transportation consider the traffic flow to be 1650 vehicles per hour per lane, but 80% of the samples are a marginable amount below this. So much less vehicles drive on carpool lanes compared to regular lanes. Furthermore, travel time that is saved by utilizing carpool lanes is rather small.
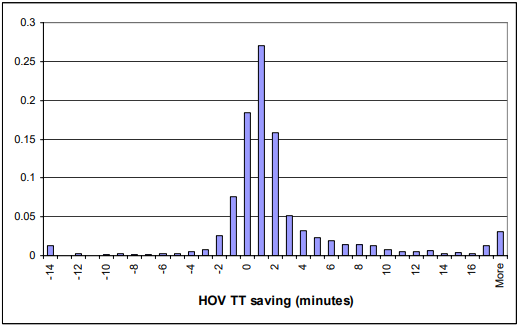

Figure ... Probabilty distribution of HOV travel time savings over a 10-mile route.
Stationary road barrier (slagboom)
Movable barrier system
Light system
Changing traffic lines
Simulation
The simulation will be made using the Unity3D software package. This software package will allow for relatively easy 3D simulations using ready-made models. It also includes physics simulations and scriptable interfaces.[1]
References
1. Bielli, M., Ambrosino, G., & Boero, M. (1994). Artificial Intelligence Application in Traffic. Retrieved 4 mei 2019, van https://books.google.nl/books?hl=en&lr=&id=3cEEdaHrykAC&oi=fnd&pg=PA3&dq=artificial+intelligence+in+traffic&ots=0qYOXTFD1B&sig=akDTYf3nqHL0U26K8-rPSvZnP6k&redir_esc=y#v=onepage&q=artificial%20intelligence%20in%20traffic&f=false
2. Li, L., Lv, Y., & Wang, F. (2016a, 10 Juli). Traffic signal timing via deep reinforcement learning - IEEE Journals & Magazine. Retrieved 4 mei 2019, from https://ieeexplore.ieee.org/abstract/document/7508798
3. Contreras, S., Kachroo, P., & Agarwal, S. (2016, 1 maart). Observability and Sensor Placement Problem on Highway Segments: A Traffic Dynamics-Based Approach - IEEE Journals & Magazine. Retrieved 4 mei 2019, from https://ieeexplore.ieee.org/abstract/document/7317783
4. Satyanarayana, M. (1970, 1 January). Intelligent Traffic System to Reduce Waiting Time at Traffic Signals f. Retrieved 4 mei 2019, from https://link.springer.com/chapter/10.1007/978-981-10-7868-2_28
5. NDW (z.d.). Documenten - Nationale Databank Wegverkeersgegevens. Retrieved 4 mei 2019, from https://www.ndw.nu/documenten/nl/
6. NDW, C. B. S. (2018, 1 maart). CBS Statline. Retrieved 4 mei 2019, from https://opendata.cbs.nl/statline/
7. Walraven, E. (2016, 1 June). Traffic flow optimization: A reinforcement learning approach. Retrieved 4 mei 2019, from https://www.sciencedirect.com/science/article/abs/pii/S0952197616000038
8. Nguyen T. (2018, 16-19 Sept.). Ahead of the Curb: Smart Roads. Retrieved 5 May 2019, from https://ieeexplore.ieee.org/document/8656667
9. El-Wakeel A., Li J., Rahman M. (2017, 14-16 Nov). Monitoring road surface anomalies towards dynamic road mapping for future smart cities. Retrieved 5 May 2019
10. Arbi Z., Belkahla O., Sbai M.K. (2017, 17-19 Feb). A multi-agent system for monitoring and regulating road traffic in a smart city. Retrieved 5 May 2019, from https://ieeexplore.ieee.org/document/8071843
11. Wang C., David B., Chalon R. (2014, 1-3 May). Dynamic road lane management: A smart city application. Retrieved 5 May 2019, from https://ieeexplore.ieee.org/document/6864085
12. Hausknecht M.m, Au T., Stone P., Fajardo D., Waller T. (2011, 5-7 Oct.). Dynamic lane reversal in traffic management. Retrieved 5 May 2019, from https://ieeexplore.ieee.org/document/6082932
13. Amditis A., Bimpas M., Thomaidis G., Netto M. (2010, 8 July). A Situation-Adaptive Lane-Keeping Support System: Overview of the SAFELANE Approach. Retrieved 5 May 2019, form https://ieeexplore.ieee.org/document/5504223
14. Chen Y., Krumm J. (n.d.). Probabilistic Modeling of Traffic Lanes from GPS Traces. Retrieved 5 May 2019
15. Yi R. (2016, 23 Jan). A Probability-Based Model of Traffic Flow. Retrieved 5 May 2019
16. Calvert S.C., Taale H., Snelder M., Hoogendoorn S.P., (2012, June). Probability in traffic: a challenge for modelling. Retrieved 5 May 2019
17. Caprani C., (2005, 10 Jan). Probalistic analysis of highway bridge traffic loading. Retrieved 5 May 2019
18. Li J., Gong S., Xiang T. (n.d.). Global Behaviour Inference using Probabilistic Latent Semantic Analysis. Retrieved 5 May 2019
19. Summala, Heikki. (2000). Brake Reaction Times and Driver Behavior Analysis. Transportation Human Factors. 2. 217-226. 10.1207/STHF0203_2. Retrieved 11 May 2019 from https://www.researchgate.net/publication/233039156_Brake_Reaction_Times_and_Driver_Behavior_Analysis
20. Olson, P. L., & Sivak, M. (1986). Perception-Response Time to Unexpected Roadway Hazards. Human Factors, 28(1), 91–96. https://doi.org/10.1177/001872088602800110
21. Kown, J., Varaiya, P. (2008). Effectiveness of California's High Occupancy Vehicle (HOV) system. Retrieved 10 May 2019 from https://www.researchgate.net/publication/222817805_Effectiveness_of_California's_High_Occupancy_Vehicle_HOV_system