From Control Systems Technology Group
Jump to navigation
Jump to search
Group Members
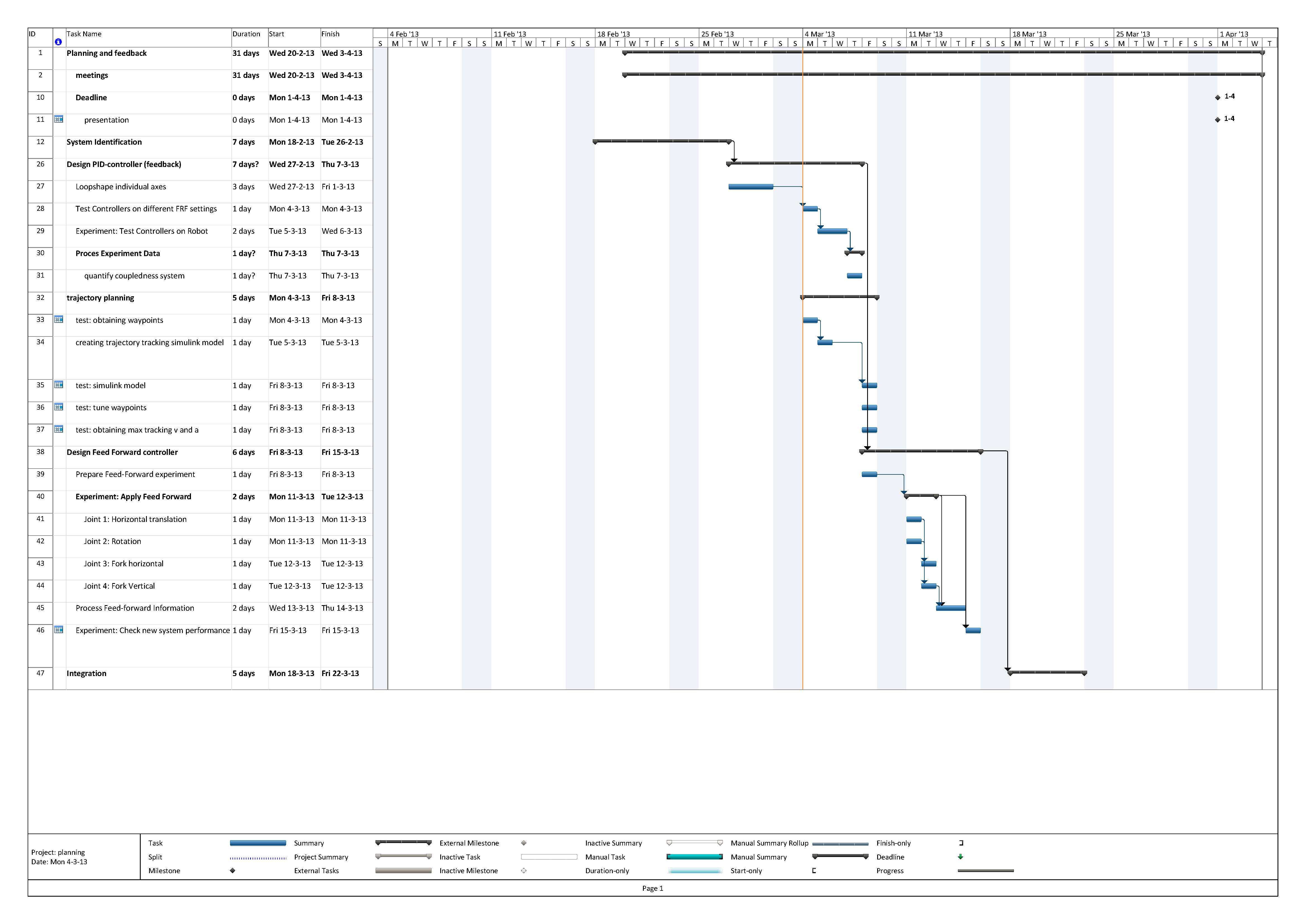
Planning
| Week:
|
Activities:
|
| Feb 18 - Feb 24 |
|
| Obtain robot specifications such as motor saturation (Frank - 4 hours). |
|
| Design FRF measurement white noise injection and conduct the measurement (Rens / Jeroen - 6 hours). |
|
| Make a selection of useful literature for the other group members (Jazz - 5 hours). |
|
| Feb 25 - Mar 3 |
|
| Design of kinematic model (not sure yet if needed) (Frank - 8 hours) |
|
| Analyze FRF data (Rens / Jazz - 8 hours) |
|
| Determine optimal algorithm: PID, LQG, H1, MPC or ILC (Jeroen - 4 hours) |
|
| Mar 4 - Mar 10 |
|
| Design controllers based on chosen algorithm for four axises separately (loop shaping) feedback and feedforward (All - 8 hours) |
|
| Mar 11 - Mar 17 |
|
| Test/tune designed controllers on the machine (Jazz / Rens - 5 hours) |
|
| Design optimal trajectory (Jeroen / Frank - 8 hours) |
|
| Mar 18 - Mar 24 |
|
| Test optimal trajectory on the machine (Frank / Jeroen - 3 hours) |
|
| Make presentation + solving unexpected problems (Rens / Jazz - 3 hours) |
|
| Apr 1 - Apr 7 |
|
Progress
Week 1
- List of what you have done and learned
- ...
Week 2
