E\Boxes are used in some of the courses. In this section, students can find the necessary information regarding to these courses.
Common Information
The information and manuals presented in this section is used for all courses. The steps given below should be followed before conducting the experiments of 4G031-Printer Casus and 4K410-Digital Motion Control. The courses specific information is given in 4G031-Printer Casus and 4K410-Digital Motion Control sections.
Installation of Ubuntu with Wubi
WARNING: This installation will only work on a normal installation of the Windows Operating System as it depends on the Windows Boot loader. If you use another operating system or if you are unsure please contact one of the course supervisors.
Wubi is a linux installer for Windows which can install and uninstall Ubuntu in the same way as any other Windows application in a simple and safe way. Ubuntu will be installed within a file in the Windows system ebox_root.disk. This file is seen by Ubuntu as a real hard disk.
The installation of Ubuntu used for this course takes up 30 GB of free-space. Therefore, it is recommended to install Ubuntu by connecting to TU/e network via an ethernet cable. Using VPN or wireless is strongly discouraged!
The wubi-installer can be obtained from the TU/e network share: \\ai-stosrv02\EBox. Install by opening the executable "wubi_dd-mm-yy-time". Because the installation is quite large this will take some time, especially creating the virtual disk, so please be patient. Connected to gigabit network the installation will take approximately 15 minutes, on a 100 mbits network connection it will take about an hour.
When you have installed Ubuntu with Wubi, you can start ubuntu by rebooting your computer. A menu will appear during startup which allows you to choose whether to run Windows and Ubuntu. When you choose Ubuntu in this menu, you will go to a new bootloader called GRUB. Here you can choose which version of Ubuntu to run as well as alter the start-up commands for running Ubuntu. Unless you are having problems starting up, you should just select the default version by pressing enter. When prompted for account information use the following:
Username: ebox<\code>
Password: ebox123<\code>
You can change the password if desired.
Installing software for experiments
Activating Matlab
The version of Matlab installed on Ubuntu needs to be activated. To do so, start matlab from a terminal window with
sudo su<\code>
matlab<\code>
and follow the instructions and use the activation key linked on the campus software site. Matlab activatie
If the student activation key doesn't work, take the employee activation key
Update to the latest experiment software
The software to perform experiments is already present, but possibly outdated. To update the software and simulink models used, you have to checkout the latest stable revision from the SVN (subversion) server. This can easily be done using the svn_update<\code> script:
Open a terminal (via the icon on the desktop)
Type svn_update<\code>
If you are experiencing any problems (bugs/errors) with the experiment software, then first make sure you have checked out and installed the latest software revision from the SVN by repeating steps Update to the latest experiment software and Compiling and installation the software. Since this update will also update the simulink templates used in the experiments, it is recommended to save any changes made to these files with a different filename and/or in a different location, preferably on your harddisk.
Compiling and installation the software
First start matlab from a terminal (if not done already):
Change the Matlab current directory to /home/ebox/svn/trunk/src/E-box
Run make_all_clean in matlab
Run make_all_install in matlab, answer yes to TU/e toolboxes installation question
Preparation prior to performing experiments
Connecting the E/BOX, changing ethernet index number
Connect the power supply to the E/BOX. Use a network cable to connect your laptop to the In-port of the E/BOX. Since the index number of the Ethernet port you are using can vary for different pc's, the right number has to be set:
Open a terminal
Type sudo geteth (returns the right port number, only when the E/box is connected)
Start matlab (type sudo matlab)
Type changeeth(x) in the matlab command window where x is the port number found with geteth.
These commands set the right ethernet index number, this needs to be done each time a new software revision is checked out.
Save data
To be safe, you should save the data you obtain via experiments outside of Ubuntu. This means that it will not be deleted if Ubuntu is uninstalled. You can save it to your Windows hard disk or use a web service such as Dropbox or Box. The partition of your hard disk on which you have installed Ubuntu can be found under \host, any other partitions can be found in \media or in the places menu from the taskbar.
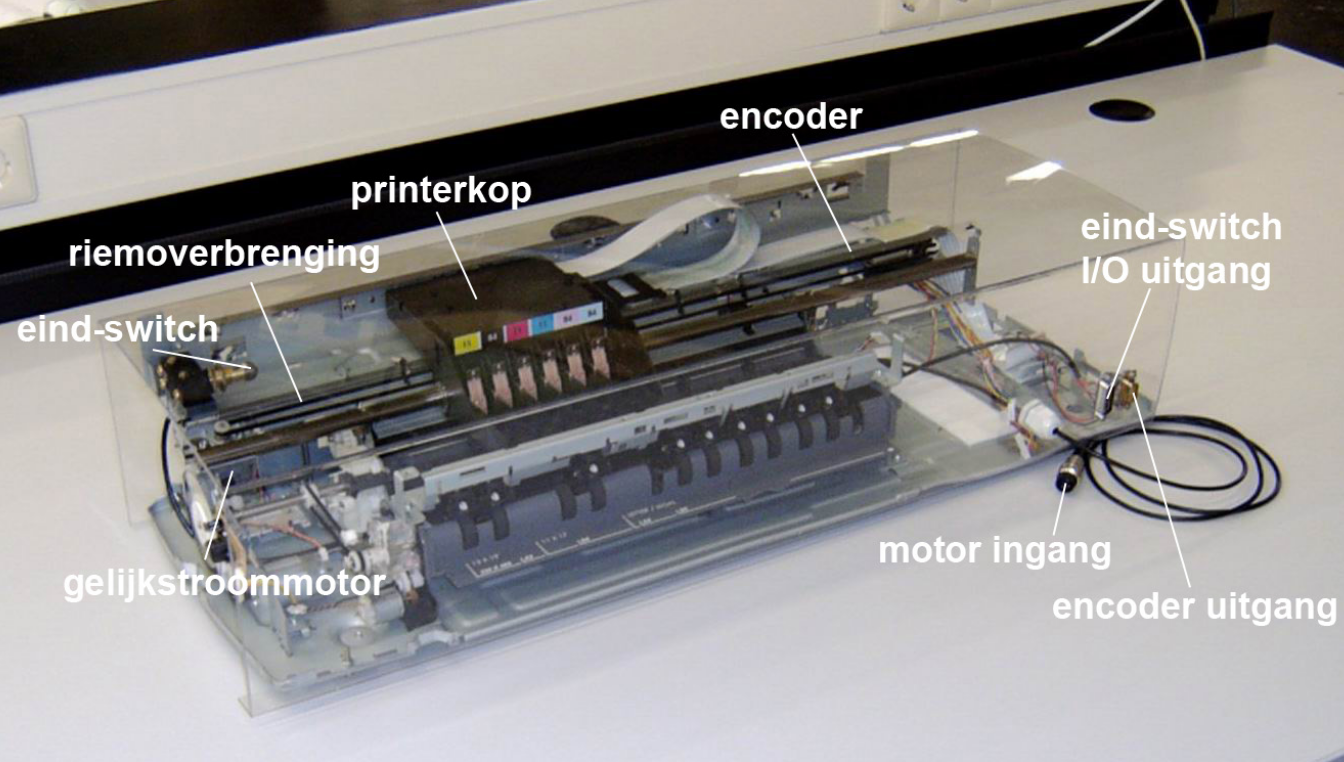
The case is a stripped A3 HP printer, see Figure 1. The required hardware for the experimental set-up is included in Table 1. You have to take your own notebook to do experiments.
Figure 1
Required hardware
Notebook with E/box image installed
Experimental HP printer setup (see Figure 1) including cables
Amplifier including BNC cable
E/box including ethernet cable
Table 1
The print head is driven by a DC motor using a belt transmission. The position of the print head is measured by means of a linear encoder. The optical encoder sensor is mounted in the printhead. On the left side an end-switch is mounted that is used to position the printhead initialization. Using the E/box it is possible to perform real-time experiments on the printer, i.e. measuring and sending signals in real-time. The amplifier provides the necessary current gain of the control signal transmitted from the E/box to the motor is controlled.
The cables of the hardware should be mounted as shown in Table 2 below. Furthermore, the amplifier and E/boxof supply cables must be provided. CAUTION: NEVER turn the amplifier on (ON) before a control signal is defined by the ectarget software (see #Performing Real-Time experiments). A crash of the printer may result. On some older amps is still 0 to 2.5 V instead of + / - 2.5 V. This is incorrect, all amplifiers have a range of + / - 2.5 V.
Table 2
I/O Printer
I/O Amplifier
I/O E/box
I/O Notebook
Motor input
LOAD
Encoder output
Encoder 1
End-switch I/O
DIGITAL I/O
+/ − 2, 5 V in
Analog out 1
Ethernet port
Ethernet port
Performing Real-Time experiments
The simulink template for the experiments can by typing printer01 in the matlab consolue. Make sure you save any changes to the model with another file name and/or in another location or you might lose your work when updating the svn or reinstalling Ubuntu.
External mode
The following steps are have to be followed to execute the experiment:
Open the simulink file and press "Ctrl-B" to start building the real-time code
Switch on the printer setup
Open a terminal
type sudo su
Go to the folder where you just built the file (the file is built to the current directory of Matlab). Use cd to specify the path.
Note: If there is a ref3 block present (yellow), you must first give it a path to follow and accept , otherwise it will throw an error.
Type ./printer01 -w in the terminal to execute your experiment. The -w part means the realtime application will be run in external mode. If you have renamed the model, printer01 in the previous commands has to be replaced by the name of your Simulink model.
The external mode requires you to connect the Simulink model to the real-time application and start it manually from the Simulink. This has to be done by choosing "Connect to Target" and "Start Real-time Code" from the Simulation menu respectively.
The standard simulation time is 30 seconds, to change this, in Simulink go to "Simulations", "Configuration Parameters" and change the "Stop time".
After the experiment has finished you can return to Matlab, load your data ("load printer01.mat") and perform the required actions to post-process the measurement data. Save all your commands in a Matlab m-file. Created variables have the prefix rt_
The -w option can be omitted to let the real-time application run in stand alone mode.
Usefull tips
To get an idea of the system behavior of the open-loop system. One of more suitable input signal for the motor can be chosen, while recording the resulting output of the system.
By applying a sinusiodal input signal (and linear system behavior) it is possible to determine a point of the Bodediagram. With several of these experimenten, a complete Bodediagram can be constructed.
With simple input signal, e.g. constant for a short period, then zero, gives relevant information about direction of motion, amount of friction, etc.
For more information regarding system identification, the following book can be read: Feedback Control of Dynamic Systems, Franklin, Powell.
Take an extra phaselag in the open-loop into account, which has the order of magnitude of ωT, where T is the sample time in [s], equal to the Fixed step size from the simulation parameters. Futhermore, ω is the frequency in [rad/s]. Increasing the open-loop gain will eventually always result in instable behevior.
Look at Frequently Asked Questions if there are any questions. This wiki will be updated during the casus on a regular basis.
Troubleshooting
error:
Invalid setting for fixed-step size (0.001) in model 'printer01'. All sample times in your model must be an integer multiple of the fixed-step size.
The sample time period (0.00048828125) of 'printer01/Generated S-Function' is not an integer multiple of the fixed step size (0.001) specified for model.
solution:
press Ctrl+e
select: 'solver'
change 'Fixed-step size (fundamental sample time):' under 'Solve options' to value "1/2048"
error:
Error(s) encountered while building model "printer01"
solution: choose a different name for the model. Using "printer01.mdl" can cause problems because the file can be shadowed by the original "printer01.mdl" in a folder higher on the Matlab path.
Digital Motion Control (DMC) - 4K410
Performing Real-Time experiments
The simulink template for the experiments can be found in the folder Templates\Specific\pato inside the E/BOX folder (see Compiling and installation the software). Make sure you save any changes to the model with another file name and/or in another location or you might lose your work when updating the svn or reinstalling Ubuntu.
External mode
The following steps are have to be followed to execute the experiment:
Open the simulink file and press "Ctrl-B" to start building the real-time code
Switch on the pato setup
Open a terminal
type sudo su
Go to the folder where you just built the file (the file is built to the current directory of Matlab). Use cd to specify the path.
Type ./pato01 -w in the terminal to execute your experiment. The -w part means the realtime application will be run in external mode. If you have renamed the model, pato01 in the previous commands has to be replaced by the name of your Simulink model.
The external mode requires you to connect the Simulink model to the real-time application and start it manually from the Simulink. This has to be done by choosing "Connect to Target" and "Start Real-time Code" from the Simulation menu respectively.
The standard simulation time is 30 seconds, to change this, in Simulink go to "Simulations", "Configuration Parameters" and change the "Stop time".
After the experiment has finished you can return to Matlab, load your data ("load pato01.mat") and perform the required actions to post-process the measurement data. Save all your commands in a Matlab m-file. Created variables have the prefix -rt
The -w option can be omitted to let the real-time application run in stand alone mode.
Qadscope
Qadscope is a program to generate outputs and read the input ports of the E/BOX, it can be seen as a digital oscilloscope and spectrum analyzer. A few guidelines:
Qadscope can be started by typing qs in the Matlab prompt.
Signals can be generated by the signal generator.
Every input- and output port can be set on and off separately (make sure the right ports are enabled and disabled).
When relations between signals, for example a FRF, are computed, the red labeled signal is the input signal and the green labeled input is the output signal.
The framelength and sample frequency can be adjusted manually.
When you are done using Qadscope you can just shut it down. All data is available in the Matlab workspace in a structure named "data".
Always stop a measurement first before saving the figure.
Frequently Asked Questions
Ubuntu start niet
Boot onder windows en controleer de grootte van de ebox_root.disk file. Deze moet 31.188.844.544 bytes groot zijn (zie properties/eigenschappen). Is dit niet het geval, dan kun je de ebox_root.disk handmatig kopieren van de server.
Tijdens compilen krijg je een error of een conflict in sampling tijden (0.001 en 1/2048)
In de terminal waar de executable draait komt repeterend
Error occurred getting packet header.
Error occurred in rt_PktServerWork.
Disconnecting from host!
Error occurred getting packet header.
Error occurred in rt_PktServerWork.
Disconnecting from host!
te staan. Dit is een bekende Linux gerelateerde bug die meestal op te lossen is met een reboot van de pc, of door een andere pc gebruiken.
De scope in Simulink laat alleen het laatste stuk meetdata zien
Gebruik "To Workspace" blokken. Voor een model met naam printer_01.mdl wordt er een printer_01.mat file aangemaakt. Daarin staan de gemeten signalen, bijvoorbeeld rt_simout. De naam van het signaal simout kan je wijzigen, dubbelklik op het "To workspace" blok!
Killing a process in Linux
If your laptop or an application (like Matlab) stops reacting you can try the following to kill the process giving problems:
Open a new terminal.
Type sudo su (superuser) to get the necessary rights.
Type ps -aux or ps -e (get a list of all processes and ID). You can also use the command top to get a list of the processes using the most CPU time.
Find the ID of the process you want to kill.
Type kill -9 <process id>
Alternatively if you know the process name you can use the pkill command so to kill matlab use pkill matlab
How to reboot cleanly even when the keyboard/mouse are frozen
There are normally several ways to reboot cleanly using key combinations such as:
CTRL + ALT+ F2 (get to a terminal, you can then run top/kill/pkill to discover and kill the offending process)
CTRL + ALT + Backspace (kills the graphic session and goes to a console, all graphical applications are terminated too)
CTRL + ALT + DEL (reboot)
If you appear to have no control of the keyboard ALT+ SYSRQ + R can help to regain control of it.
ALT+ SYSRQ + R-E-I-S-U-B (forces a clean reboot even when the keyboard is not responding)
The last one is in fact a sequence of commands, so to use it, hold down ALT+SYSRQ and then press the keys R-E-I-S-U-B in sequence with a couple of seconds between each of the commands.