PRE2017 3 Groep11: Difference between revisions
| Line 92: | Line 92: | ||
* The platform must be able to cummunicate whether there is room for a new package | * The platform must be able to cummunicate whether there is room for a new package | ||
* The package casing must have a lock mechanism | * The package casing must have a lock mechanism | ||
* A drone must be able to | * A drone must be able to drop a package on/in the platform without damaging it | ||
* The drone may not cause harm to people/pets/other obstacles | * The drone may not cause harm to people/pets/other obstacles | ||
* The platform must be able to receive a package of max 2.25 kg[21] and size of 40 x 40 x 40 cm. [34] | * The platform must be able to receive a package of max 2.25 kg[21] and size of 40 x 40 x 40 cm. [34] | ||
Revision as of 10:33, 30 March 2018
| Members of group 11 | |
| C.J.G. Cartignij | 1014018 |
| K.D. van Kempen | 1002991 |
| W.W.A. Verhaegen | 1024053 |
| J.P. Versluijs | 1019169 |
| M. van Wiggen | 1020451 |
Coaching Questions
Problem statement
State of the art
A lot of scientific research is currently being done on the implementation of drones for delivery purposes. However, this research mainly focuses on the routing of the drones, the avoidance of mid-air collisions and privacy aspects. There are almost no sources on the delivery itself. On the other hand, there are some conceptual US patents describing drone delivery receptacles.
The problem that is still present with these concepts, however, is that these concepts are mostly implementations for a smart home or platforms that need to be built into a house and can only be used in one specific situation. This makes these concepts rather expensive and difficult to implement. Thereby, these concepts are only applicable for people who have a house and not for, for example, flats. Therefore, it is needed to make a simpler system that can be used in multiple envirnments.
Problem statement
The usage of drones has become popular in various fields of work and also for recreational use. Drones have a promising perspective in a lot of different areas, like military, surveillance and package delivery.The problem that will be tried to solve in this project is the problem of the actual delivery around the house. In the current state of the delivery drones the buyer need to place a landing pad in a place with enough free space around it. Therefore the buyer needs to be home when the delivery is done, since the landing pad could be blown away due to wind for example. Furthermore, the way drones are delivering now can be harmful for bystanders. Kids and pets that don’t understand that the rotor blades could be harmful. And the drones themselves can be broken if the pet uses is as a play toy. These problems takes away from the ease that should come with using the delivery drone technology. Furthermore, the packages that are delivered are easily stolen in any other place than the back yard, and certain weather conditions could be harmful for the package if the package is exposed to these conditions too long. The last meters of the so called “last mile delivery” contain multiple problems that need to be tackled before the drone delivery system can really become mainstream. A solution to these problems could lobby governments and NGO's in legalizing delivery drone usage. A certain landing pad that has its own designated place, that can hold the package for a sufficient amount of time and are weather/theft proof could be a solution for these problems.
Objectives
- Develop a way in which a drone can safely drop off a package safely, considering the following components:
- The dimensions of the parcel, which is carried by the drone
- The landing platform for the drone at the delivery address
- Risk of theft
- Location of the landing platform
- Safety risks for bystanders niet echt toch???????
Who are the stakeholders and what do they require
Users
Delivery services
A user group of the new product, will be delivery services. They can use the delivery box and the platform as a faster and cheaper way to bring their packages to the customers[21]. A problem of this is that not every country allows drones to fly everywhere, because of privacy. Because of this, the delivery services have to make sure and prove to the government that they do not save imagery. A benefit from the new technology is that the company can deliver packages way faster, namely in less than an hour. This is also very useful for customers because, if they need something quickly, they will no longer have to leave the house. As delivery services become more useful for customers, more people will use the delivery services and the delivery companies will grow. Another benefit for the delivery services is that by using a drone the delivery process will be much cheaper than when the company has to hire a driver. Another thing that makes the delivery cheaper is that the delivery time is way shorter. That means that more packages can be delivered in a shorter time. In short, more customers and faster delivery times ensure a huge growth for the delivery services.
Package buyers (consumers)
Consumers require a delivery method that is affordable, fast, reliable and the package can’t take any damage during the delivery. Drone delivery is a good solution for these requirements of the consumers. However, the consumer has to be home to make sure that the surroundings of the landing platform are clear from dangers to the drone. The consumer requires an alternative to these landing platform that are currently used. Having to be at home takes away from the ease of the delivery drone service. People require a delivery system where they don’t have to be home, without having to think about the safety of bystanders during delivery, potential theft of or damage to the package. Consumers are mostly concerned with the invasion of privacy that drones could possibly bring with them. People are scared that the drones can record their actions when the drones fly over their property. People can even feel oppressed or become paranoid because of the usage of drones[12]. The landing platform has to take the privacy concerns of residents into account. Furthermore, the safety of drone delivery is often questioned[12]. For people to be comfortable with using drone delivery system the safety of bystanders during the landing, drop-and take off has to be guaranteed.
Society
Governments in urban planning
Governments can have a huge impact on the success and eventual implementation of the delivery drones. Governments are in the position to make future neighborhoods, that still have to be build, delivery drone friendly, and change current neighborhoods to be delivery drone friendly as well. To be delivery drone friendly the government can implement designated landing spots for delivery drones, that are easily accessible for the residents. There are multiple ways to add this functionality and different options may be chosen for different neighborhoods. Possible options are: Make a central point for all the drones to delivery its package, make landing spots between 2 houses as a shared depot or give every buyer of a future house the option to implement a landing spot in the roof. As can be seen the governmental influence in this new technology can be quite substantial. For the privacy issue explained in the previous section, the place of the landing pad can have a huge impact on how invasive residents find the delivery drones. For the government it is easier to implement this new function in all the newly build homes and neighborhoods without being invasive, then it is for individuals. E.g. the government can build more easily in the front side of the house, the place where people find the delivery drone technology less invasive. For the government itself, focusing on this technology in urban planning there is much profit to be made in the happiness of the residents. There are less delivery people on the street, which is good for the environment and helps to keep streets in living areas quiet and safe[21]. The governments stimulates the economy, because more people are able to quickly order products from enterprises. Putting time in this system during urban planning can increase the feeling of privacy the residents in urban areas have.
Regulation drones
Privacy was mentioned in the part of consumers/buyers as an important issue against the use of drones. The government can enforce laws for delivery drones services to make sure that the delivery drones do not safe any visual input needed to move around. People would become reassured that the delivery drones that flies over their back garden doesn't make any recording of what they see, thus safeguarding privacy. The government can enforce other laws that the delivery drones are easily distinguishable from reacreational drones. This way people now what is flying over their property. One last point where the urban planning of the government is important is the regulation of the air traffic of the drones. Drone delivery as a new technology suddenly fill the air with a new form of transport that wasn't used in urban areas before. The government has to regulate the air traffic of the drones with clear laws, this to prevent annoyance of residents towards the drone delivery infratructure and system.
Enterprise
Delivery box manufacturers
The manufacturers want to make a product that is cheap to make, so they can sell it for less and eventually sell more. The production of the designed delivery box isn’t a really cheap production. An advantage of this product is that it reaches a large target group, namely anyone who uses delivery services to order products. Because the target group for this product is so high, it is relatively easy to achieve a high turnover. And with a high turnover, no very high profit margin is needed, so that the product can be sold even cheaper. Another benefit from this delivery box is that it is applicable on any living situation, so every delivery box can be made exactly the same. The fact that the target group is large and the fact that the product can be used in every living situation ensures that mass production will be possible for this product, so it can be manufactured cheap and thus can it be sold relatively cheap.
Delivery box installers
The platforms where the package will be brought to has to be built in or around the place where the customer lives. For some customers this is easy, for example people with a large garden or a large balcony. But there are a lot of living situations, like flats or terraced houses where the customer can’t build the platform on his house himself. A benefit from this is that many people need to do a small renovation to their house, to place the platform. Many construction workers can , with a little extra training, learn how to install platforms on houses. With the ability to place platforms on houses, the target group of those companies gets a lot bigger, because a lot of people need them for the new technology. This means that there will be more work for construction workers and thus will those companies grow bigger and have increased sales.
Drone manufacturers
If most of the delivery is done with drones, then drone manufacturers will have a larger market to sell their drones to. If this manufacturer needs sell more drones, then they have to produce more drones. The company has to find a cheap way to produce these drones, so they can sell them for less and eventually sell more of them. A way to produce the drones in a cheap way is mass production. The drones also have to be able to work with the new delivery system, so they can be used for that. The drones need to fly very careful because of possible fragile products and the drones need to have the correct dimensions for landing on the platform. Once the new delivery system has been implemented, the company must continue to develop the drones, so that the delivery continues to improve and the drones keep being sold.
RPC's
Requirements
- There should be a clearance of 50 cm from the center of the platform to any other object, so there is enough space to let a drone land.*
- The package casing must be weather resistant in normal conditions.
- The package can’t be damaged by rain, wind, hail, snow and debris flying around
- The platform must be able to be used by more than one person
- Requirements of the government for unlicensed building** [33][36]:
- Back/front garden
- Maximum area of 2 m²
- Roof on back side
- Have a flat roof or,
- Can’t stick out of the roof more than 1.75 m
- 0.5 – 1 m of space to between all sides of the roof and the construction
- Back/front garden
Preferences
- The platform should be as compact as possible
- The platform must be placed in such a way that people can easily access it
- The package should not encounter too much impact
- The landing platform should be cheap
- Easy operation
- Notification should be send when package arrives
- The platform should be installable in a wide range of environments
- The platform should have a neutral appearance
Constraints
- Platform and drone can identify each other, to insure the right package is delivered at the right platform
- The platform must be able to cummunicate whether there is room for a new package
- The package casing must have a lock mechanism
- A drone must be able to drop a package on/in the platform without damaging it
- The drone may not cause harm to people/pets/other obstacles
- The platform must be able to receive a package of max 2.25 kg[21] and size of 40 x 40 x 40 cm. [34]
Annotations
The dimensions of the drone that, for instance, Amazon uses is not publicly availlable. The delivery drone system is still in development and isn't publicly implemented yet. Due to the fact that the system is still in development the information about the system, therefore drone size, is very limited. The 50 cm clearance on all the sides seem to be a realistic value considering the estimated size of the drone, platform and packages.*
These requirements are based on the unlicensed building criteria of the dutch government. There aren't any specific building criteria for our landing platfrom, due to the fact that this is a fairly new idea and no existing patent has been fully worked out. These building requirements are often very case specific, thus certain requirements can be changed if our idea is implemented in the real world. The dimensions of the system may have to change to remain within the unlicesed building category. The current requirements are our best educated guesses for now.**
Concepts
Interaction platform-parcel
- The box must be made of waterproof hard plastic. It can be sent back for a certain amount, like a deposit.
- While approaching the destined platform, a code confirms if the correct platform is being approached.
- The drone carries a box with two hooks on corners opposite to the side where the box can be opened.
- Drone carries a box with a lock; the base will lock it in place with an arm / magnet / etc.
- Drone carries an ordinary box; the base will put a cage around it.
- The platform itself holds the parcel instead of an external container. The parcel is transfered from the drone to the platform.
- The platform where the package is deliverd is placed on top of a spring. The platform will be easy to acces for the drone, after the package is placed on top of the platform it will drop.
Then the top of the protection box is placed on top of the package. - Same idea as above, but the spring is replaced with an lift that drops the package down.
- A platform that forms around the packages when a certain weight is put on it.
- A hole in the ground that opens when a code is shown. Otherwise it is closed and you're able to walk over it like a normal tile.
- For a society with both flying/driving drones:
- The platform is either placed on a pole(Flying drones) or moved to ground level with two arms(Driving drones).
- The pole it out of the ground(Flying drones) and can move back into the ground so it is accesible for driving drones and the pole isn't as present.
Lock mechanism
- The side of the box that can be opened is faced down, so potential thieves can't open it.
- The hooks on the box clamp on the platform and lock, so the box can't be opened anymore.
- A code lock, of which the code is shared with the recipient via email.
- Fingerprint sensor
- RFID with mobile phone
- Own standard key/code/password
- Identification of the right platform/drone
- QR code
- RFID
- Radio / IR / other radiation to transfer information
- Barcode
- Box opens after estimated delivery time has gone by.
Location landing platform
- Roof
- Garden
- balcony
- Out of a window(maybe attached to wall in order to keep window closed).
- Drone can enter specific part of house.
- Attached to the wall next to the front door.
- For appartments, a room easily accesible for drones where a certain amount of landing platforms are(Package need to be retrieved in x minutes, so it can be used by other residents).
"MICHAEL system"[29]
- Joint landing platforms for all the people in a neighborhood.
- Flying drones to deliver to this point.
- Driving drones deliver to front door.
- Or, People retrieve the package themselves from the landing pad.
Final design
Chosen concept
"Insert picture concept"
Concept
It has been chosen to make a box as a landing platform, in which a drone can drop a parcel. This platform’s housing has a simple box shape. On the top of the box is space for a delivery drone to land. The platform offers identification, so the drone can verify his delivery address, by means of a bar- or QR-code. The housing contains two cylinders, one inside the other, acting as an access to the storage compartment. The outer cylinder is servers a door or lit for the platform, closing the housing. The inner has a cylinder to receive the package from the drone when the housing is opened. Both cylinders turn around the same axis. The cylinders turn simultaneously, but in opposite direction opening or closing the housing. The drone drops the package in the exposed inner cylinder, the cylinders rotate back into closed position and the package drops onto the package holding platform. The platform lowers the package into the storage compartment. The user can collect his package via a separate door, containing a bar- or QR-code as well for identification purposes.
Advantages
- The system is quite compact
- The systems has no out / inward moving parts
- The drone can't be obstructed/blocked because of these parts
- This keeps the platform compact
- The drone can't be obstructed/blocked because of these parts
- Can be placed in various environments
- The design is efficient and secure
- The system is easily waterproofed
- The system is anti-theft because of the identification codes and anti-theft casing
- The system can be shared with multiple people(depending on the location of the system)
Disadvantages
- Very expansive
- Placement in optimal location is:
- Time consuming
- Has additional costs
- Building licence needed for optimal location
Considerations for choosing this concept
The "MICHAEL system"[29] seem to not be a viable concept to use for our landing pad. The designated landing pad that can be used for multiple people is hard to implement in already existing neigborhoods, since a decent area is needed to work out the concept that may not be available. Then the person has to either walk to the landing spot to get their package, or they have to be home for the driving drone to deliver the package from the landing area to the front door. This takes away from the ease that is strived for when using the delivery drone service, since you have to be home for to obtain the package. Another way is to have your own box where the driving drone delivers the package into, but then it becomes even more expensive then it already is. Futhermore, the reason to have an shared landing spot in a neigborhood completely fails if people need to get their own safe box system as well.
For the location the front side of the roof the best location for the landing pad, taking into account all the stakeholders. The front side of the house is considered less of a personal space as the back side of the house. Therefore placing the box on the front side of the house will safeguard the privacy more than placing the box on the back side of the house. The roof is a better location than placing the landing pad on the roof for multiple reasons. If the landing pad is placed on top of the roof the package can't be stolen easily by thieves. The drone can spot the landing pad more easily on the roof than when it is on the ground[35], and the drone has a shorter vertical moving time. The safety of bystanders is taking into account as well, since there are no direct bystanders like overexciting dogs or kids that can interfere with the system. The only downside is that for already existing homes it will cost extra money to install the system onto the roof and a building license is needed for the front side.[33]
The enterprises want to have a reach that is as big as possible. Taking into account the whishes of the enterprise the system is also usable in the front and back yard, and the back side of the roof. The system works in these locations in the same way, the difference is that it cost less money for people to use the system and a building license isn't needed. However, the system is less optimized in terms of privacy and safety for these locations. Therfore, the help of government in urban planning is asked. With the help of the government people get the chance to build the system into their future house, getting an optimal service.
Adding the protection of the box already before shipping will cause more problems than that it would solve. Exemples of these system are: "The box must be made of waterproof hard plastic. It can be sent back for a certain amount, like a deposit" and "Drone carries a box with a lock; the base will lock it in place with an arm / magnet / etc.". These system put to much of a burden to the enterprises. These enterprises need to invest a lot of money for all these boxes, and it costs an extra flight for every package to return these protecting boxes. Moreover, doubeling the amount of flights would quite possibly annoy consumers. And the extra weight of the protected boxes would either result in a change of drones or a lower maximum weight of the packages. Therefore, these systems aren't chosen for the final concept.
The two systems that fold/put a cage/protection around the package wouldn't be optimal, because the moving parts can easily obstruct the drone while delivering the package. Furthermore, these systems can only be used on the ground or people need to do acrobatic tricks from their window to retrieve the package. Endangering people into these activities isn't helping anyone and putting the system on the ground was a less optimal choice as explained earlier. The "A hole in the ground that opens when a code is shown. Otherwise it is closed and you're able to walk over it like a normal tile" system seems to be a less optimal choice for the same reason.
Considering the identification/lock part of the system the bar- or QR-code are the best options for all the stakeholders. Every package already has either a bar- or QR-code which makes it easier for the enterprises to adapt to our landing platform. If the landing platform would be shared by multiple household than a bar-code, QR-code or a personal password would be safe and easy to use. If the system is used for only one household a physical key is also a possiblity. There aren't big differences between the identification/lock systems, one is not necessarily much better than the other. For the final concept the QR-code has been chosen. The code can be send to you via email, and than you can use it to unlock the box. This way multiple people can use the system, no one needs to remember a password or keep a physical key and the system is still safe from theft. From an average camera, the distance at which a QR code can be scanned is about 10 times the width of the QR code itself[35]. It is the intention that the QR code can’t be scanned too soon, because then the platform will be open unnecessarily long. A QR code of 2 x 2 centimetres has been chosen, so that the QR code can be scanned once the drone has landed on the platform.
Prototype
In this section, the process of making the prototype will be explained.
NX drawings prototype
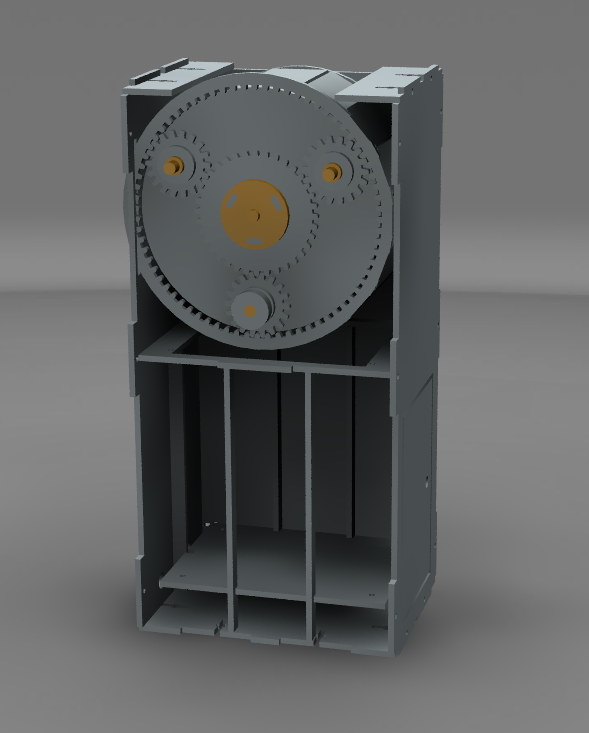
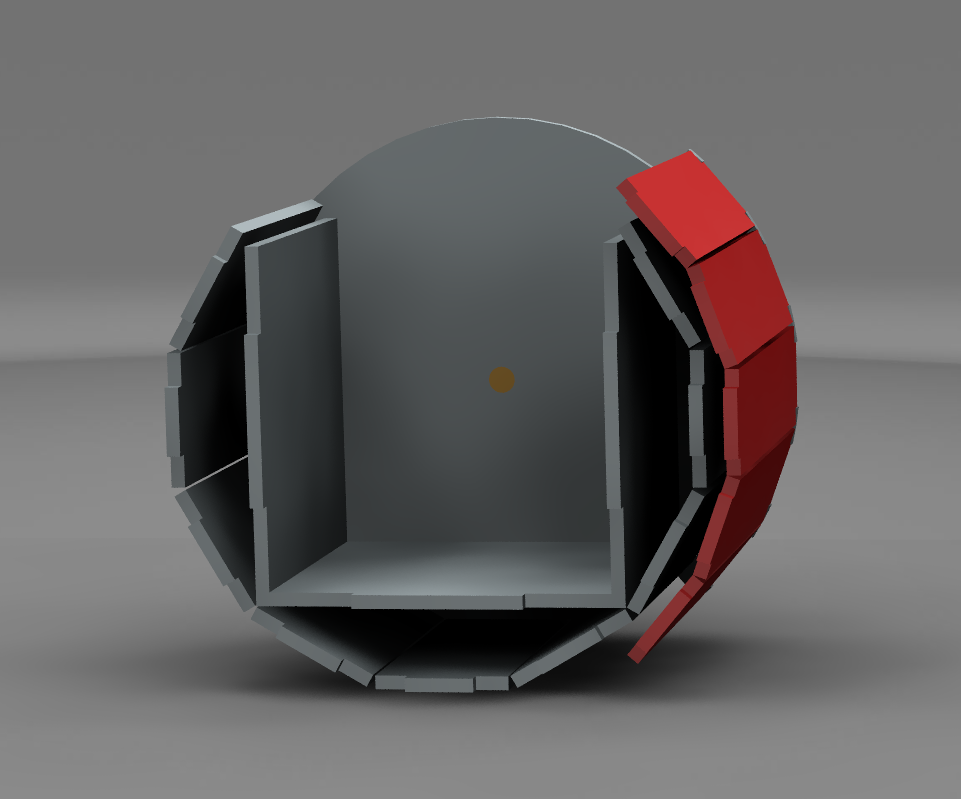
Firstly, a 3D-sketch of the prototype has been made. In this sketch, construction is already accounted for, as can be seen in the edges, where holes and slits have been made, in order to screw the parts to each other. Below, the final sketches of the prototype can be seen. The left image shows the outside of the prototype. In the middle picture, the side wall has been removed, so the planetary gears driving the cylinders can be seen, just as the platform that keeps a package from falling from too high. The right picture shows the inner cylinder (in grey) and the outer 'cylinder' (in red). The inner cylinder receives the package and rotates to drop it in the compartment below. The outer cylinder keeps the package from falling out of the inner cylinder before it has completely rotated and also serves as a roof. Only the electrical components haven't been added in the assembly.
- 3D sketches prototype
-
 Total prototype
Total prototype -
 Prototype without side wall
Prototype without side wall -
 Cylinders
Cylinders



Materials and components needed for prototype
In order to make the assembly, several materials and components are needed. These things can be seen in the table below.
| Part | Amount | Costs | Store | Ordered? | Paid By |
|---|---|---|---|---|---|
| Raspberry Pi 3 Model B | 1 | € 37.49 | SOS Solutions | x | Camiel |
| Micro SD Memory Card | 1 | € 0 | Borrowed (Camiel) | x | Camiel |
| Raspberry Pi Case | 1 | € 0 | Borrowed (Camiel) | x | Camiel |
| Raspberry Pi Power Supply | 1 | € 0 | Borrowed (Camiel) | x | Camiel |
| 5V 2A Adapter | 1 | € 8.00 | Tinytronics | x | Camiel |
| Continous servo | 2 | € 16.00 | Tinytronics | x | Werner |
| Breadboard | 1 | € 2.50 | Tinytronics | x | Werner |
| Male-Female Jumper Cables | 20 | € 1.50 | Tinytronics | x | Werner |
| Male-Male Jumper Cables | 20 | € 1.50 | Tinytronics | x | Werner |
| DC Jack female adapter | 1 | € 1.00 | Tinytronics | x | Camiel |
| AA Battery | 12 | € 6.99 | Conrad | x | Camiel |
| USB camera | 1 | € 13.49 | Conrad | x | Camiel |
| Ball Bearings | 6 | € 14.94 | Conrad | x | Camiel |
| MDF (laser cut) (4x600x300mm) | 4 | € 44.35 | DigiFab | x | Jasper |
| Simple lock | 1 | € 10.95 | Hornbach | x | Camiel |
| Hinge | 2 | € 3.40 | Hornbach | x | Camiel |
| Dowel (8mm x 100 cm) | 1 | € 0.50 | Hornbach | x | Camiel |
| Bolts and Nuts (M4 x 16mm) | 30 | € 4.58 | Gamma | x | Camiel |
| Bolts and Nuts (M4 x 20 mm) | 30 | € 4,98 | Gamma | x | Jasper |
| Kill Switch | 1 | € 0 | Borrowed (Camiel) | x | Camiel |
| Total costs | € 172,17 | ||||
Lasercut MDF
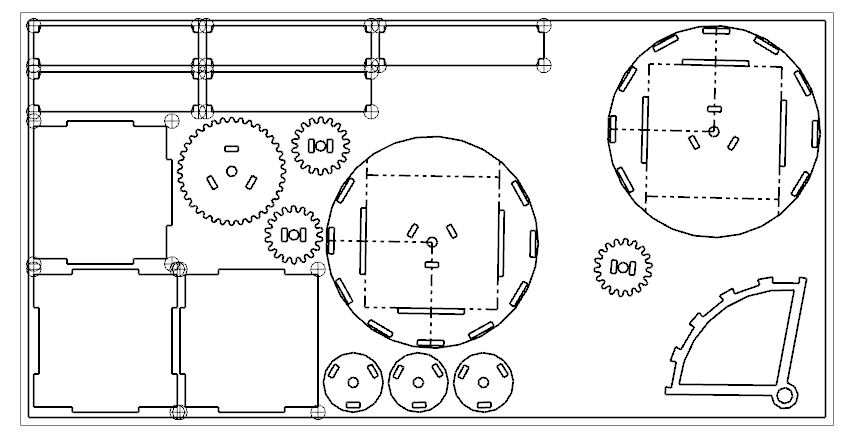
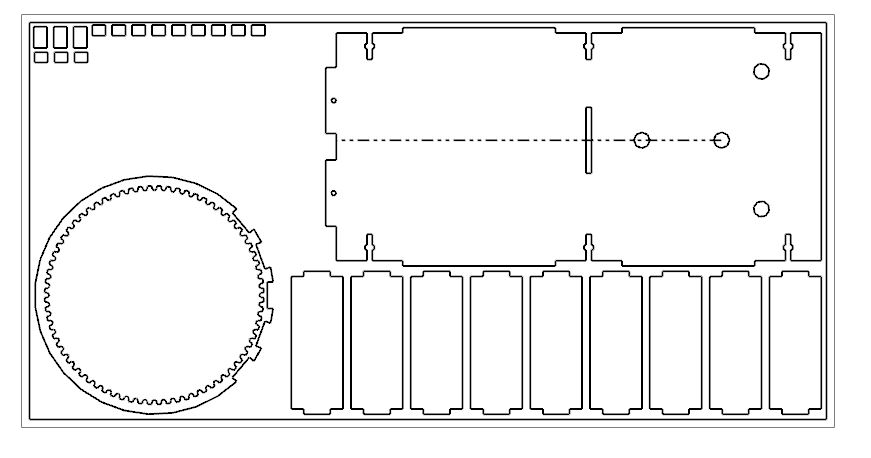
The prototype is made out of MDF, Medium Mensity Fibreboard. This MDF is lasercut into the correct shapes, as shown in the following figures. These sketches have been made by converting the 3D model to a series of 2D components, after which the components have been cut out in a laser cut machine. The resulting lasercut sheets that have followed from the conversion to 2D can be seen below here.
- Lasercut MDF images
-
-




Locking mechanism
Electrical circuit
In order to be able to assemble the prototype safely and quickly, a schematic overview of the wiring of all electrical components has been made as well. This overview can be seen below.

Raspberry Pi
In order to control the electrical system of the prototype a raspberry pi model 3B is used. Since the prototype needs to have a QR-code scanner, a simple controller like an Arduino is not sufficient, since the graphical processing requires more processing/memory power than an Arduino can deliver, so the logical choice went to the Raspberry Pi. The dimensions of the Raspberry Pi are 9x6x3 cm. With this system two continuous servo's and a camera are controlled. The two continuous servos are needed in order to rotate the cylinder and to move the lift. The camera is needed for checking the QR code on the drone to see if the drone is on the right platform, and to make sure the platform only opens when the QR code is verified.
To control the raspberry and said system a program has been written with python. This program can be found here: PRE2017_3_11_Python_Code. In this code, the servos are controlled by sending a certain pulse width modulated voltage to them, by using the "RPi.GPIO" package. This only happens if a correct QR code is read. The QR code reader is defined as a function, which uses the "pyzbar", "Image" and "cv2" package. "pyzbar" is a QR code reader, "Image is an image reader" and "cv2" reads the feed from the webcam. If the QR code equals one of the codes in the database, the platform opens, if a code which is not correct is read, the platform stays closed and transmits a message.
Simplifications
Due to impracticality and high cost, the prototype misses some features the actual product will/could have, but aren't vital for a proper demonstration. These are listed here:
- Currently, the program reads permitted codes from a file on the raspberry pi ("authcodes"). In a real life application, it could get these files from a secure web server which communicates with the delivery service. This way the program can be activated, only when a drone is on the way
- The program currently closes the cylinder after a certain time interval. In a real life application, a sensor will be inserted in the cylinder, which detects it when the package is dropped, gives of a signal, and immediately closes the cylinder. A sensor could for example be a force sensor.
- In the prototype, the platform moves down all the way when a package is dropped on it. In a real life application, the platform could move down just far enough to clear the cylinder. This could be measured with a laser sensor. This laser could be located right below the cylinder, and get blocked a package. When the platform moved far enough down, the laser is no longer blocked, and a signal is sent to the controller, which stops the platform from moving down. This way, multiple packages can safely be stored in the box, without some of them falling a long way.
Realised prototype
Youtube demonstration video
In the following link, a demonstration will be given of the functionalities of the prototype.
https://www.youtube.com/watch?v=O3DlDyHigvc
- Realized prototype gallery
-
 Closed cylinder
Closed cylinder -
 Half-open cylinder
Half-open cylinder -
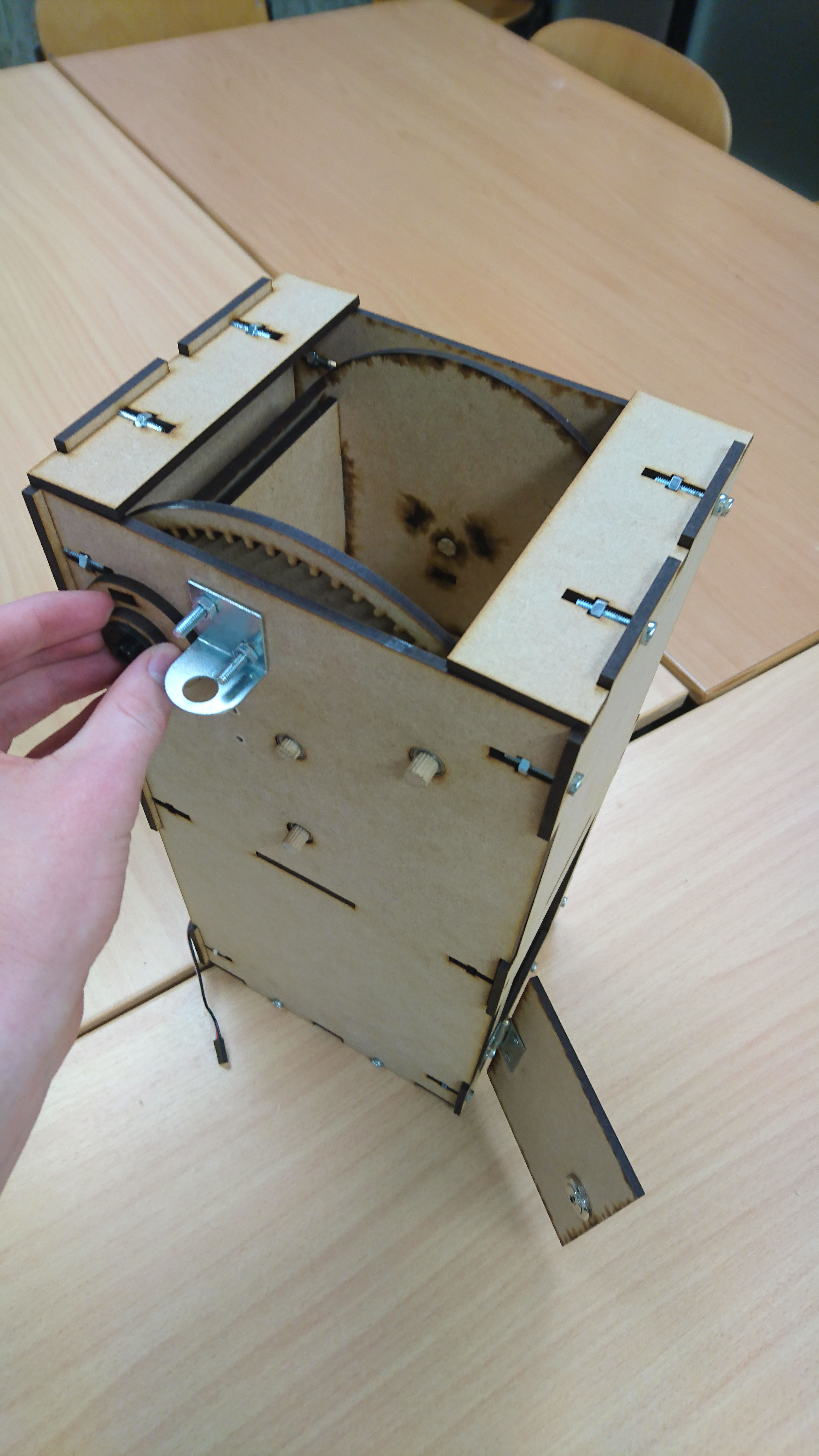 Opened cylinder
Opened cylinder



-
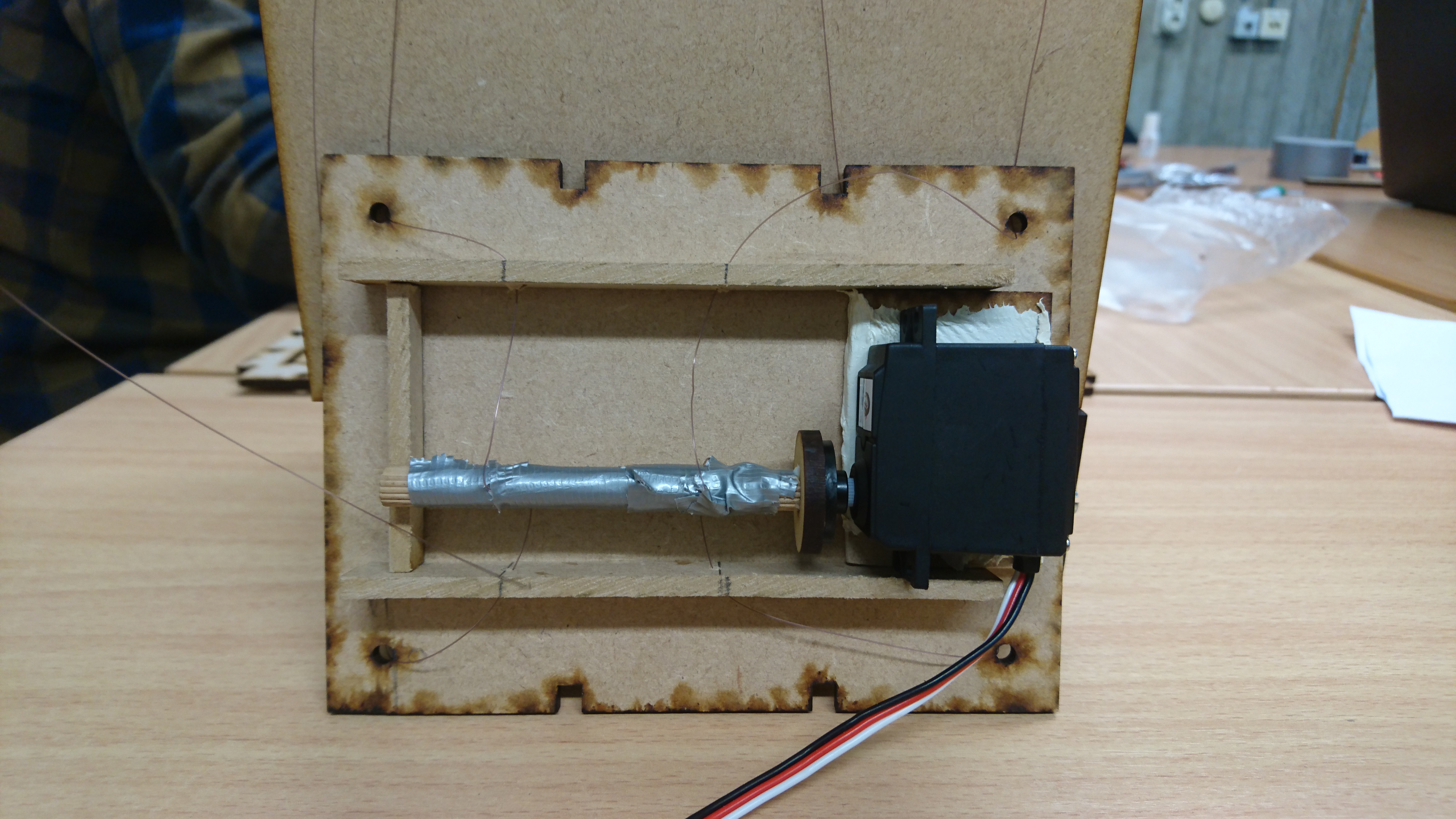 Platform servo
Platform servo -
 Cylinder
Cylinder


-
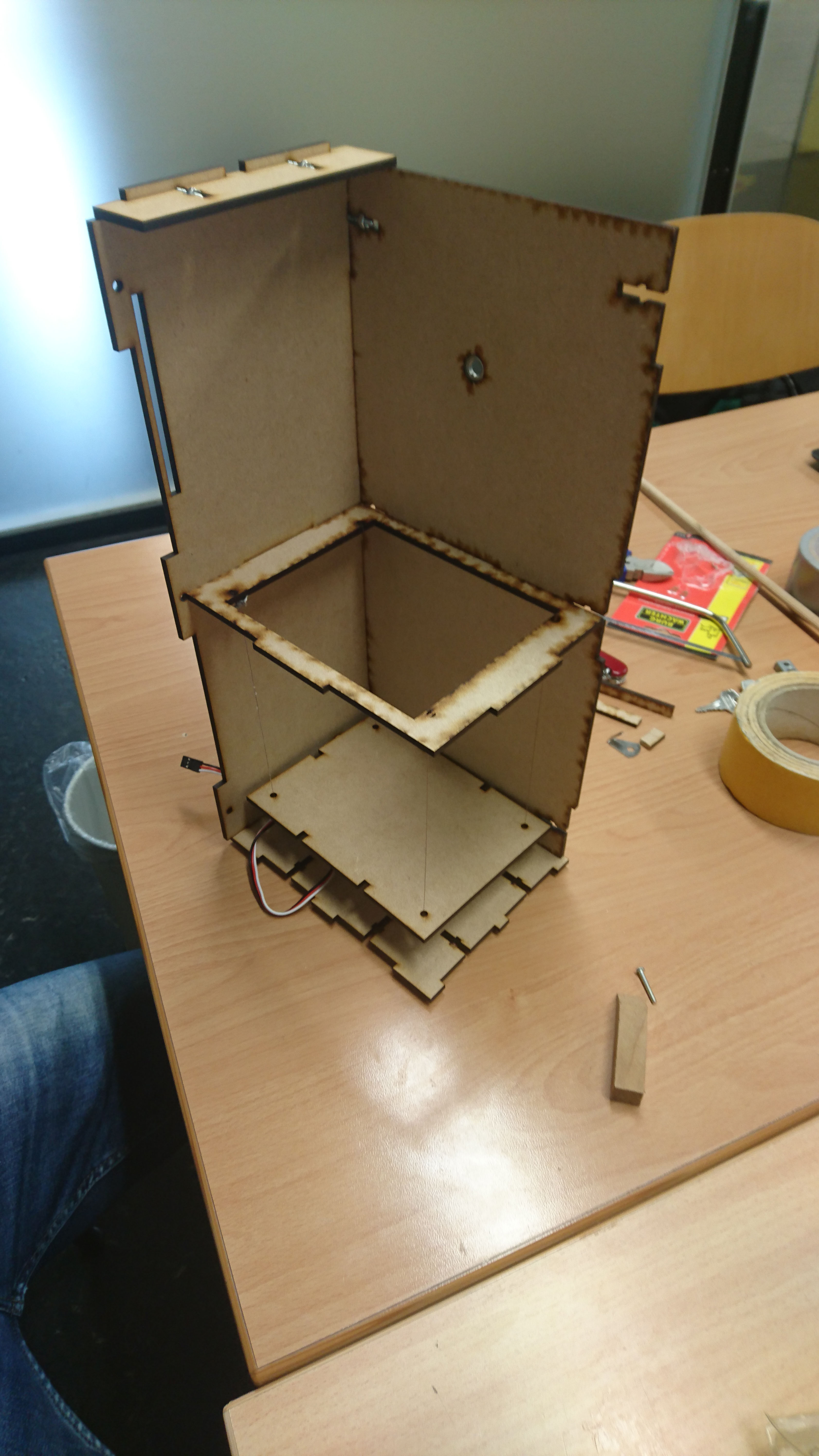 Isometric platform view
Isometric platform view -
 Opened sideview
Opened sideview -
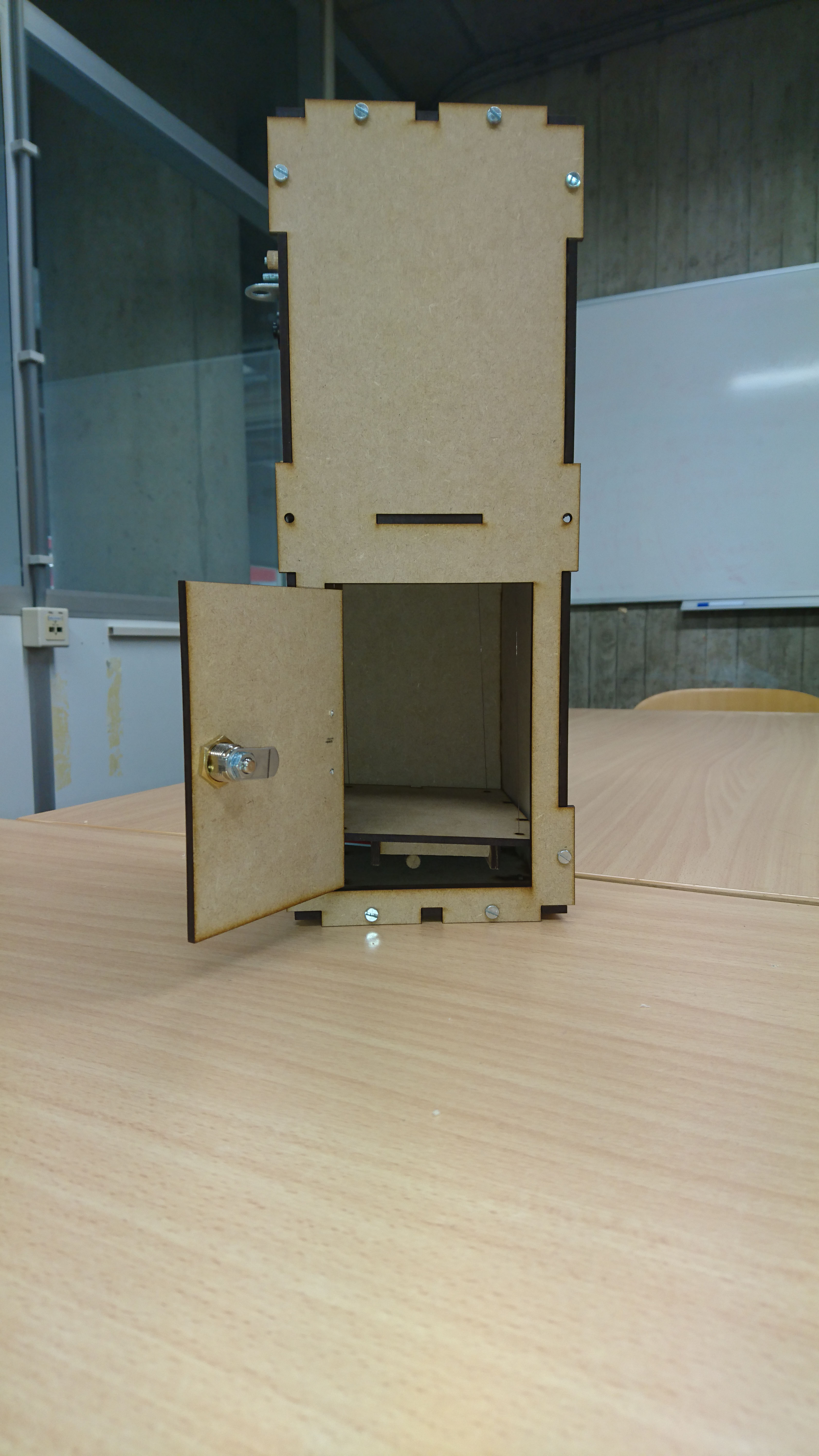 Closed platform view
Closed platform view



Real product and pitch
Real product and differences from the prototype
The real product, which people can use in real life, will be bigger than the scaled prototype. The ratio between the prototype and the real product is 1:4, which means that the dimensions of the real product are 65 x 65 x 130 cm (l x b x h). The product will be made of stainless steel, so the material will not rust. This material is also chosen because it is strong and can’t be destroyed easily to prevent theft. For decoration it is possible to put a plastic layer on the outside of the platform, so it won’t look like an ugly piece of steel. The platform will have a link to the internet, so it can get information about the package that is being delivered. This connection can also be used to send a message to the buyer when the package is delivered in the platform. The platform will have a camera, so it can recognize the QR-code, that is put under the drone. This QR code is needed so that the platform can check whether the drone delivers the right package in the right place. The door, for opening the platform to take out the package, has to be secured with a lock. There are a few possible options for this lock: An NFC chip, a QR-code, a code and a simple lock with a key. If the platform is full of packages, than the buyer will get a message that he can’t order something on the internet until the platform is emptied. The volume of the package that can still fit in the platform will be determined by a sensor.
Product pitch
The usage of drones has become popular in various fields of work and recreational use. One promising new field of use for drones is package delivery. However, there is still a number of problems that need to be solved, such as the actual delivery at the customers address. For example, Amazon currently uses just a plastic sheet, which a customer should put on the ground, on which the parcel will be dropped. This solution, however, is a rather bad solution, since a customer should be at home and the parcel is not protected against theft or bad weather.
In order to solve these problems, this receptacle has been built. It can be permanently placed in multiple environments, protects the parcel against theft and bad weather, it can be shared and might even be elaborated to receive multiple packages. This is all achieved by a lock that is based on NFC, personalised for a specific parcel or person; a QR code on the drone and receptacle to ensure the right parcel is delivered in the right receptacle and an opening for the drone that only works in one direction, because of the use of the two cylinders. All this is achieved in a box of 65 x 65 x 130 cm (l x w x h)
Accountability
There are many situations where the producer of a product can be accountable for damage suffered by consumers. A lot of these forms of accountability aren’t described here, since these are forms of accountability that are not product specific for the landing platform. For example, a consumers of the landing platform can be attacked by an installer of the platform. The company has accountability since the installer is their employee. The project focusses on the landing platform, therefore the product accountability will be explained further below.
Product accountability
In problematic situations with the product the producer of a product can be accountable for the damage the consumer has suffered. There are several guidelines where the producer and consumer has to pay attention to considering accountability. The consumer is in the disadvantageous position, since there is only one guideline[37]:
- The consumer that wants a compensation for the damage suffered has to prove that there is damage suffered, that the damage is caused by the product and that the product was used as intended while dealing the damage.
For the producer the following guidelines in dealing with accountability are set up by the European Union[37]:
- The producer has to deliver clear warning signs and a clear user manual.
- The producer of the product is accountable if the product fails to meet safety standards, and that the product is dangerous to use.
- The producer is not accountable if it was impossible to predict that the product was indeed dangerous to use, the product became dangerous because of deterioration or the damage was caused because of misuse of the product.
Accountability of the drone landing platform
- In the situation that the consumer misuses the landing platform and ignores the warnings given on either the platform itself or the user instructions, then the consumer is at fault and they are the one accountable for the damage. One could think of the situation where a person puts his or her hands between the turning cylinders of the platform or the rotor blades of the drone. The consumer buys a platform to be able to safely use the delivery drone system, the action of the users is clearly misuse of the system and we rely on the first guideline for producers.
- In the situation where the package is stolen or damaged and the platform hasn’t taken to much damage, then we are accountable for the damage suffered. We claim to deliver a system that secures the package from damage and theft, in such a scenario we have failed to deliver what we claim to deliver. However, if the landing platform is in a severely altered state then we aren’t accountable for the damage suffered. The landing platform is already on the roof to reduce risk of theft, when
- We are not accountable for damage or privacy claims when the platform isn’t placed on the roof of the consumer. The product has a clear description that to be able to deliver complete safety for bystanders, safety against theft and safeguard privacy the system has to be placed on top of the roof. The system does work in other placed, like the back garden, and the system is legally allowed to be placed there. The system isn’t on its optimal place and we regard this as misuse of the system.
- If the system opens when there is no drone, the wrong drone or stays open when a drone has left, then we are responsible for the damage the package has taken and possible the house of the consumer. We claim to deliver a system that secures the packages from theft and damage , in this case we fail to deliver this claim.
- If there is a communication problem with the drone and the landing platform and this causes damage then we are responsible for the damage. The same counts for when the consumers can’t open the door to retrieved its package, and a mechanic has to come. The costs of the repairs are our responsibility. We claim to deliver a system that is easy to use, in this case we fail to deliver this claim.
Annotation
The cases of accountability described above do still rely on the guidelines of the European Union. Meaning that the consumer has to prove that certain damage is caused by the platform, that the platform is used appropriately and that no damage has been done earlier to the platform.
Approach, milestones and deliverables
Approach
First we will study the literature to figure out to what extent our case is already researched. After that we will attempt to determine the present day problems with the technology. From the present status of the technology we will make a list of RPC's. With that list we will create concepts, work out the best concept and assemble/build the prototype. In the design process it is very probable that we need to go back a step to eventually make a better design. In the design phase we may need to measure the drones that are available in Gemini to determine the final measurements of the design. And in the testing phase we might need drones to check if the system react to a flying drone like we designed.
Milestones
- Literature study
- Sources read
- Sources summarized
- Conceptualize
- RPC's
- Concepts/drawings of concepts
- Decide a final concept
- Work out concept
- Choose/order materials
- Choose/order operating system/electronic parts(Like arduino was in Engineering Design case)
- Costs overview
- Building/assembling prototype
- Test prototype
- Conduct a survey about the prototype
Deliverables
- A technical report of the design process(Wiki)
- A prototype of the landing pad
- NX design of the real product
- Final presentation explaing the design process and showing the prototype
Who's doing what
| Week | Task | Responsible |
|---|---|---|
| 1 | Write introduction | Everyone together |
| Update the wiki | Everyone for themselves | |
| Search for sources (10-2) | ||
| Summarize sources (19-2) | ||
| 2 | Rewrite subsections made in Week 1 | Everyone together |
| Make a final RPC list out of the personal ones | ||
| Combine the concepts in one clear list | ||
| Specific literature study (Summerize 2 sources pp) | Everyone for themselves | |
| Think of RPC's for the landing platform | ||
| Describe or draw concepts | ||
| 3 | Set up a survey | Camiel |
| Rewrite the RPC's | Werner | |
| Work out and compare concepts | Kobus, Michael and Jasper | |
| 4 | Finish final Concepts | Everyone together |
| Put the model in NX | Kobus and Jasper | |
| USE analysis buyer/customers | Camiel | |
| USE analysis companies | Werner | |
| USE analysis society/legislation | Michael | |
| Determine materials for actual product | Michael | |
| Determine materials for prototype | Mostly Jasper and kobus, discussed with whole group | |
| Figure out the electronic systems | Camiel, Werner and Michael | |
| Update wiki | Everyone for themselves | |
| 5 | Prototype hardware | Kobus and Jasper |
| Put the prototype in Siemens NX and make it ready for laser cutting | Jasper and Kobus | |
| Finish USE analysis | Werner, Michael and Camiel | |
| Finish materials of actual product | Michael | |
| Send mail for materials and machine usage | Michael | |
| Order parts(Like arduino or building materials) | Kobus, Werner and Camiel | |
| Electronic circuit | Michael and Werner | |
| Prototype software | Camiel | |
| Update Wiki | Everyone for themselves | |
| 6 | Prototype hardware | Kobus and Jasper |
| Finish electronic circuit | Camiel | |
| Finish software | Camiel | |
| Assembling hardware/software | Everyone together | |
| Update Wiki | Everyone for themselves | |
| 7 | Finish Presentation | Everyone together |
| Finish prototype software | ||
| Finish prototype hardware | ||
| Presenter(s) | Jasper and Michael | |
| Finish Wiki | Everyone together |
Sources and summaries of the general subject
1.Toksoz, Tuna; Gulkaya, Tutku; and Price, Thomas, "Auto-Selection Of Package Delivery Location Based On Estimated Time Of Delivery", Technical Disclosure Commons, (December 22, 2016)
2.Tavana, M., Khalili-Damghani, K., Santos-Arteaga, F. J., & Zandi, M. H. (2017). Drone shipping versus truck delivery in a cross-docking system with multiple fleets and products. Expert Systems with Applications, 72, 93-107.
3.Scott, J., & Scott, C. (2017). Drone delivery models for healthcare.
4.Multi-Agent Path Finding with Payload Transfers and the Package-Exchange Robot-Routing Problem Hang Ma, Craig Tovey, Guni Sharon, T. K. Satish Kumar, Sven Koenig
5.Anbaroğlu, B., " Parcel delivery in an urban environment using unmanned aerial systems: a vision paper", ISPRS, (November, 2017)
6.Lidynia, Chantal; Philipsen, Ralf; Ziefle, Martina, " The Sky’s (Not) the Limit - Influence of Expertise and Privacy Disposition on the Use of Multicopters ", Springer, (June 21, 2017)
7.Asma, Troudi; Addouche, Sid-Ali; Dellagiy, Sofiene; El Mhamedi, Abderrahman; "Post-Production Analysis Approach for drone delivery fleet", IEEE Explore digital library, (December 01, 2017)
8.Coelho, Bruno N.; Coelho, Vitor N.; Coelho, Igor M.; Ochi, Luiz S. ; Haghnazar K., Roozbeh; Zuidema, Demetrius;. Lima, Milton S.F; da Costa, Adilson R., "A multi-objective green UAV routing problem", Elsevier, (December, 2017)
9.Poikonen, Stefan; Wang, Xingyin; Golden, Bruce, “The Vehicle Routing Problem with Drones: Extended Models and Connections”, Wiley online library, (June 7, 2017)
10.Troudi, A., Addouche, S.-A., Dellagi, S., El Mhademi, A. “Logistics support for a delivery drone fleet”, 2nd International Conference on Smart Cities, Smart-CT 2017; Malaga; Spain; 14 June 2017 through 16 June 2017, Volume 10268 LNCS, 2017, Pages 86-96.
11.
Kim, M., Matson, E.T. “A cost-optimization model in multi-agent system routing for drone delivery” 5115th International Conference on Practical Applications of Agents and Multi-Agent Systems, PAAMS 2017; Porto; Portugal; 21 June 2017 through 23 June 2017; Volume 722, 2017, Pages 40-51.
12.Clarke, R. “The regulation of civilian drones impacts on behavioral privacy”, Elsevier (2014).
13.Valente, J., Gardenas, A.A., “Understanding security threats in consumer drones through the lens of the discovery quadcopter family” 1st Workshop on Internet of Things Security and Privacy, IoT S and P 201717; Dallas; United States; 3 November 2017 through; Pages 31-36.
14.Kim, S.J., Lim, G.J., Cho, J., Côte, M.J. “Drone-Aided Healthcare Services for Patients with Chronic diseases in Rural Areas” Journal of Intelligent and Robotic Systems: Theory and Applications Volume 88, Issue 1, 1 October 2017, Pages 163-180.
15.Amukele, T. K., Sokoll, L. J., Pepper, D., Howard, D. P., & Street, J. (2015). Can unmanned aerial systems (drones) be used for the routine transport of chemistry, hematology, and coagulation laboratory specimens?. PLoS One, 10(7), e0134020.’’
16.Paduano, J. D., Wissler, J. B., Piedmonte, M. D., & Mindell, D. A. (2017). U.S. Patent No. 9,557,742. Washington, DC: U.S. Patent and Trademark Office.
17.Haidari, L. A., Brown, S. T., Ferguson, M., Bancroft, E., Spiker, M., Wilcox, A., ... & Lee, B. Y. (2016). The economic and operational value of using drones to transport vaccines. Vaccine, 34(34), 4062-4067.
18.Amukele, T. K., Street, J., Carroll, K., Miller, H., & Zhang, S. X. (2016). Drone transport of microbes in blood and sputum laboratory specimens. Journal of clinical microbiology, 54(10), 2622-2625.
19.Cavoukian, A. (2012). Privacy and drones: Unmanned aerial vehicles (pp. 1-30). Ontario, Canada: Information and Privacy Commissioner of Ontario, Canada.
20.Bennett, W. C. (2014). Civilian drones, privacy, and the federal-state balance. Center for Technology Innovation at Brookings.
21.Welch, Adrienne (2015). "A cost-benefit analysis of Amazon Prime Air". University of Tennessee at Chattanooga.
22.Justin J. Boutilier, BSc Steven C. Brooks, MD Alyf Janmohamed Adam Byers, MDEM Jason E. Buick, MSc Cathy Zhan, MSc Angela P. Schoellig, PhD Sheldon Cheskes, MD Laurie J. Morrison, MD Timothy C. Y. Chan. (2017). “Optimizing a Drone Network to Deliver Automated External Defibrillators”.
Sources and summaries on the specific case
23.Sisko, M. (2015). U.S. Patent Application No. 14/565,348.
24.Fadell, A.M.; Rogers, M.L.; Matsuoka, Y.; Sloo, D.; Honjo, S.; McGaraghan, S.A.; Plitkins, M.; Veron, M.; Guenette, I. (2017). Secure Handling of Unsupervised Package Drop Off at Smarthome. USA.
25.Garrec, P., & Cornic, P. (2012). U.S. Patent No. 8,265,808. Washington, DC: U.S. Patent and Trademark Office.
26.Walsh, R., & Falesch, A. J. (2015). U.S. Patent Application No. 14/587,828.
27.Shucker, Brian Daniel, and Brandon Kyle Trew. "Machine-readable delivery platform for automated package delivery." U.S. Patent No. 9,864,967. 9 Jan. 2018.
28.E. Farris, W. F. McGee. (2016). System and Method for Controlling Drone Delivery or Pick up During a Delivery or Pickup Phase of Drone Operation. (US)
29.Young, L.A. “A Multi-Modality Mobility Concept for a Small Package Delivery UAV”
30.Koster, K.L. “Delivery platform for unmanned areal vehicles” U.S. Patent No. 2015/0175276 A1, Jun. 25, 2015.
31.Pleis, James. "Drone Operated Delivery Receptacle." U.S. Patent Application No. 15/289,295.
32. van Dyke. J. (2016). Unattended Delivery Drop Box. Chicago (US).
33.Building laws
34.Package size
35. http://cstwiki.wtb.tue.nl/index.php?title=PRE2016_3_Groep20
36. Defition Building or Structure
37. Accountability laws