File:Simumodel.JPG: Difference between revisions
Jump to navigation
Jump to search
The simulink model of one arm part. |
No edit summary |
||
| Line 1: | Line 1: | ||
The simulink model of one arm part. | The simulink model of one arm part. The input theta_r is the requested angle for the arm, that follows from the KINECT. A force from the user on the arm is added in the step block. the maximum force the robot can give is clipped with the saturation block | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Latest revision as of 22:26, 20 June 2016
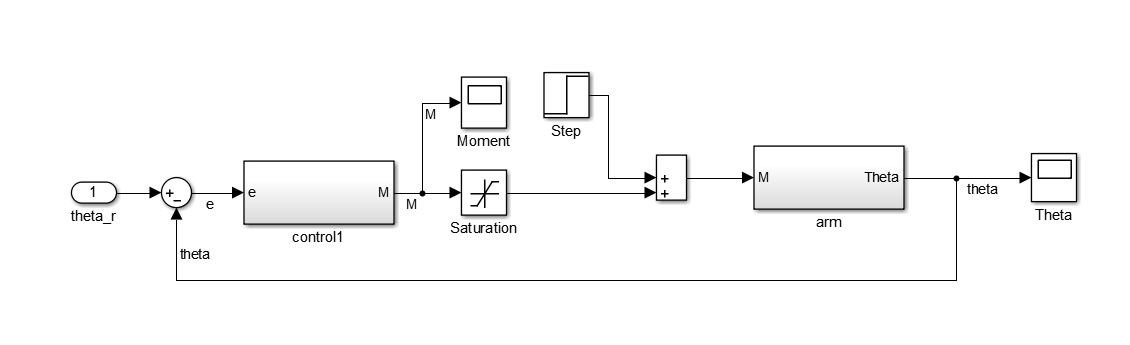
The simulink model of one arm part. The input theta_r is the requested angle for the arm, that follows from the KINECT. A force from the user on the arm is added in the step block. the maximum force the robot can give is clipped with the saturation block
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:31, 20 June 2016 | 1,130 × 345 (30 KB) | S115595 (talk | contribs) | The simulink model of one arm part. |
{kind=link}
You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}