Using LiDAR data in each loop to determine and adjust the robot's behavioural strategy. We iteratively check if any obstacle distance is below the set safe distance (0.5 metres) by iterating over these distance values. If this is found, a stop command is sent to the basic controller, otherwise the robot will keep going.
* Robot needs to collect distance measurements from LIDAR for real time;
* The robot will need to respond when any detected obstacle distance is below this threshold;
* Based on the results of the analysis, the robot adjusts its travel speed or modifies its behaviour in order to avoid obstacles.
A boolean flag named 'move ' is used to control whether the robot should continue moving or stop.
It is initialized to 'true', indicating that the robot is initially allowed to move.
Obstacle Detection:
The program continuously reads laser sensor data inside the control loop.
If any distance measurement from the laser scan is less than 0.2, an obstacle is detected.
Stopping Action:
When an obstacle is detected, the 'move ' flag is set to 'false'.
Setting 'move ' to 'false' indicates that the robot should stop moving.
Additionally, a stop command 'io.sendBaseReference(0, 0, 0)' is sent to the base controller immediately after detecting the obstacle.
Control Loop Condition:
The control loop continues executing as long as the robot is properly connected 'io.ok()' and the 'move ' flag is 'true'.
Once the 'move' flag is set to 'false' , the control loop stops executing, effectively halting the robot's motion.
Solution of Chuyu
Solution of Chuyu
Initialization:
The IO object initializes the io layer.
The Rate object helps keep the loop at a fixed frequency.
Obstacle Detection:
Laser data is continuously read within the control loop.
If any distance measurement from the laser scan is less than 0.5, an obstacle is detected.
Stopping Action:
If an obstacle is detected:
Different actions are taken based on the distance to the obstacle.
If the obstacle distance is less than 0.2, the robot stops.
Control Loop Condition:
The loop continues executing as long as the robot is properly connected (io.ok() is true).
The loop also incorporates obstacle detection and stopping actions.
Solution of Nan
Solution of Nan
I defined a vector whose elements represent the distance of a "safe outer contour" from the LiDAR sensor in all directions that the sensor can detect. The robot stops immediately when this safe outer contour hits an object, i.e., when any element of the emc::LaserData::rangs vector is smaller than the corresponding element of the safe outer contour vector.
The "safe outer contour" is defined as the actual outer contour of the robot plus the safe braking distance of the robot in all directions. In the current implementation, this outer contour is simply set as a circle and it is assumed that the safe braking distance is the same in all directions and independent of speed, i.e., a segment of a circular arc centered on the sensor with a fixed value of radius. And after experimentation, the radius was set to 0.15 meters.
However, theoretically, the real outer contour data can be determined and a mapping model of speed and safe braking distance can be constructed. Thus, the accurate safe outer contour can be calculated at runtime.
Solution of Yidan
Using LiDAR data in each loop to determine and adjust the robot's behavioural strategy. We iteratively check if any obstacle distance is below the set safe distance (0.5 metres) by iterating over these distance values. If this is found, a stop command is sent to the basic controller, otherwise the robot will keep going.
Robot needs to collect distance measurements from LIDAR for real time;
The robot will need to respond when any detected obstacle distance is below this threshold;
Based on the results of the analysis, the robot adjusts its travel speed or modifies its behaviour in order to avoid obstacles.
Exercise 2: Testing your don't crash
Hao
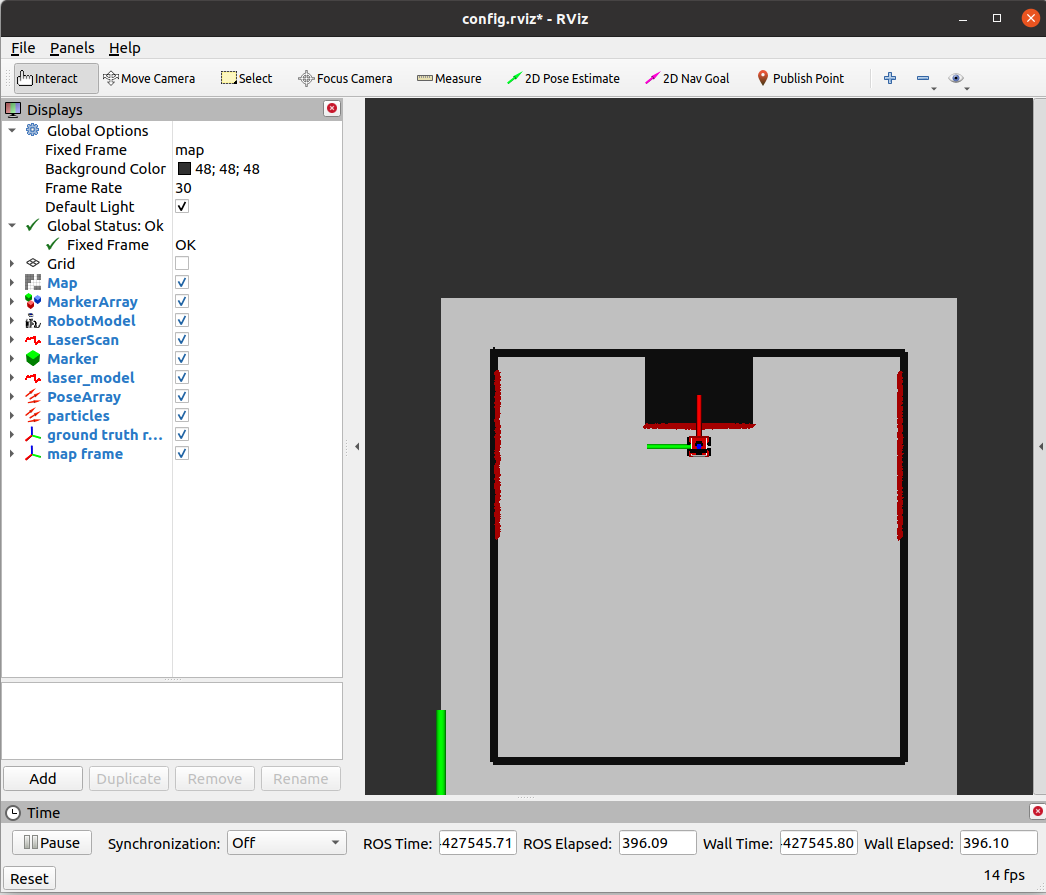
In map1 the robot can stop as the designed purpose.
In map2 the robot stopped when detected the wall on the right side with distance<=0.2
Chuyu:
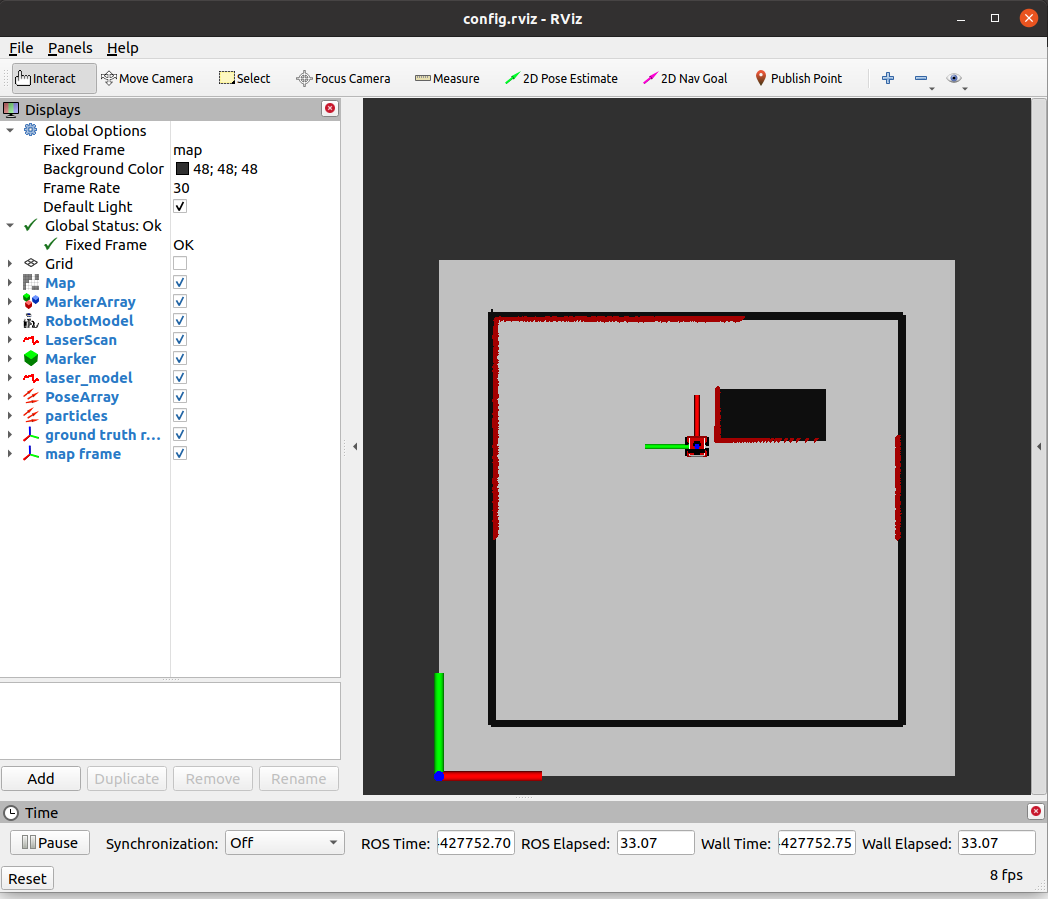
In map 1, the robot keeps moving and does not collide with obstacles
In map 2, the robot keeps moving and does not collide with obstacles