In most cases a display with the right program can already achieve more than this.
Intelligent buoy
Detecting “unnatural” on top of the water surface (or possibly further down as well by means of a long stick with sensors attached to it). It could detect earthquakes, tsunamis and volcanic activity (above or below sea level). It is possible to make more small scale versions of this buoy to work in a swarm like configuration.
The buoy could also be used to detect how clean the water is, or it could sense something about its surroundings and predict stuff about the ecosystem the buoy has been placed in.
Swarm of Intelligent buoys that are able to sense its surroundings and deliver data based on this
Users
The target group of our device would be people who live close to either oceans or rivers, or areas where it is known that floods are prone to occur. Although The Netherlands is excellent protected against the ocean, it is still below sea level, making it a dangerous area if floods were to occur.
Therefore, everyone listed above will benefit from having something installed that could reliably warn about incoming floods. However, even if you don’t live in one of the mentioned areas, you can still benefit. This is because floods can cause major damage to the economy of a country, making it generally harder for others, or other surrounding countries as well.
To summarise, the most important stakeholders include:
The general public: benefits from the increased protection
The government: Increased chance of economy stability
Investors: Due to implementation, they get higher returns (or something, I'm not an investor). They may also have some say in the development process.
Inventors/designers: Can sell patents for money, or design further. They also directly control how it operates.
State of the art
Water quality checks, focussed on sensors:
Review of sensors to monitor water quality: https://erncip-project.jrc.ec.europa.eu/sites/default/files/Review_of_sensors_to_monitor_water_%20quality.pdf - Gives a list of water quality monitoring probes, and the paper gives details on the specification of the sensors and their price. Addtionally, it gives other insights to water monitorization. The basic monitorization across all sites includes water’s flow rate, turbidity, pH, temperature, conductivity and pressure. Depending on the need chlorine, fluoride, nitrate, particle count or total organic carbon are also monitored in some places. The list of sensors and the description of functionality:
Detecting micro plastics, focussing on the chemistry part:
Methods for sampling and detection of microplastics in water and sediment: A critical review: https://www.sciencedirect.com/science/article/pii/S0165993618305247 - Plastics smaller than 5mm can be considered as microplastics. It is potentially harmful to organisms or ecosystems. The distribution of the microplastics varies depending on various factors, the simple location and depth make a significant difference. The Mesh size also can have large influence on concentrations reported. The most common way to separate microplastic and the samples are filtration, sieving, flotation and elutriation.
Generating energy:
Tidal current power generation: https://link.springer.com/article/10.1007/s40722-016-0044-8 + https://www.sciencedirect.com/science/article/pii/030142159190049T - There are different types of tidal current generators: turbines (multiple types), kites and hydrofoils. Out of these 3, turbines are the easiest to understand, however, they either require too much space (axial-flow), or don’t generate enough reliable power (cross-flow). Furthermore, the materials could get damaged by prolonged contact with water, reducing the lifespan of anything operating in the water.
Idea 1 Idea 1Idea 2Idea 2Solar power generation: https://www.sciencedirect.com/science/article/pii/S2214785318312665 - may be possible, however, it would mean that there is a large possibility that the device would not be active for large periods of time. Further, life spans of PV cells are not extremely long, and are easily damaged, making it not the best solution for ocean power generation.
Conclusion: In general, most of the solutions regarding waves or movements take into account the fact that the generation is able to take place on a fixed point. If we would use something that floats in water, this may become an issue. Therefore, although it is not the most optimal, PV energy generation (solar panels), seems to be the best solution.
Earthquake and flood detection:
Early flood detection in developing countries: https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4937387&tag=1 This paper discusses early flood detection systems specifically for developing countries. This is an interesting user as it is a big problem that does not get a lot of funding. This paper then also goes into developing a simple system that non-technical users in said developing countries can then also use. Although it does not go into too much technical detail, it gives a nice overview of a full system.
Sensor-based river monitoring: https://www.preprints.org/manuscript/202301.0561/v2 The sensor is based above the water that measures water level with sonar. Besides the water level it can measure air and soil temperature, humidity, solar radiation, wind speed and direction, rainfall, and atmospheric pressure.
Most of the state of art mentioned in the section above integrates measurements of rise in water level. Measuring sea level is done with with satellites https://link.springer.com/article/10.1007/s10712-019-09569-1 This paper explains how sea level is measured with satellites, which is a difficult problem due to how the earth is shaped and how gravity affects the water.
Monitoring aquatic flora and fauna:
For the monitoring of aquatic flora and fauna, the target group would be very dependent on what needs to be monitored, therefore some potential ideas could be a general monitoring buoy or a buoy that specifically monitors some type of flora or fauna. For the concept of more specific monitoring types of buoys, one article that was found was seen to be making a prototype of a buoy that is used to monitor a certain type of naturally occurring harmful algae: https://ieeexplore.ieee.org/abstract/document/9269340?casa_token=Zd6UuMqNOzUAAAAA:L0hEid16nuf2RkAiAwKQq3qmjLf20eA8NeGWoLWJqAi7g5BqLbC81ZHZl05Sas68oqBI8mVxDA. Therefore, a potential idea could be to look into what sort of naturally occurring aquatic flora or fauna that would be harmful or even deadly to humans and use buoys to monitor these sort of situations. But this would come with some questions and flaws. For example what sensors would need to be used, how much power is used to continuously monitor this and where would be optimal location in the body of water to get the clearest results from the buoy about its measurements.
One the other hand, another potential use for monitoring aquatic flora and fauna would be for research purposes. An example would be the naturally occurring temporary streams seen in the following article https://wires.onlinelibrary.wiley.com/doi/full/10.1002/wat2.1223. But this specific idea might include some vital questions, for example would the temporary streams always be in the same location, has human urbanisation affected these streams at all, and are buoys a suitable way of measuring these streams for the flora and fauna.
Buoys / other water thing, general & smart:
Smart Buoys
During the search of the state-of-the-art for smart buoys, many of the articles found consisted of potential prototypes for different varieties of buoys that were deemed to be 'smart buoys'. Smart buoys can be considered to fit in all the previous. This section will briefly discuss some potential implementations and key questions that would need to be asked when considering a 'smart buoy', that does not go into as specific topics as the previous headings. First of all, from the following article https://ieeexplore.ieee.org/abstract/document/9389065?casa_token=v1iLJdDU9aQAAAAA:hti71IRV6XXgflmDxqO0QJ1bzK-giHRImvC4JeY6JnXn2hj0Z45GVwvBPukmVMOL1-gyF9qkvQ, multiple questions were seen to be important for the designing and making of smart buoys and even buoys in general. The most important question that can be deduced is in what sort of body of water will the buoy be deployed in. For example, Oceans and Seas are more unpredictable and destructive due to being large bodies of water, whereas a lake is usually much calmer, even in more extreme weather conditions. Following this, another question that was seen is in what sort of depth would the buoys be deployed in. This can directly impact some decisions that would be made, such as connections for swarm behaviour. For example in shallower, it might be a possibility connect the buoys using wires, but in deeper waters it might be better to connect them wirelessly. This would then also impact what would need to be put on the buoy so that it would function as intended, such as what hardware and software would need to be used, and how would it be powered, which is looked into in the Generating electricity section.
This following article showed a potential way a 'smart buoy' could be implemeted as a state-of-the-art idea: https://ieeexplore.ieee.org/abstract/document/4099173?casa_token=KUV7FHj5NFUAAAAA:_IQbjLXYaynpEfAHVrqD5MLHcfGcV4nyolt6auvFSZZQ7zUhhcor-JBIMuTrrfhW9gOqmG4sUA. The main concept of the prototype mentioned here is that a 'smart buoy' could be used in an auto aligning fashion and the reason that this might be important is because many buoys already existing are used to guide ships with some used to moore smaller ships away from shore. But since the seas and oceans can be quite unpredictable, harsh weather can sweep away buoys from their initial location which can affect how ships and boats would move around. The degree of how far it might be swept away would depend on the anchor being used. But if auto aligning buoys are used, then there might not be a need for heavily anchored buoys as the auto aligning buoy could move back to its original position using a GPS or something along those lines. But the biggest problem with this sort of idea is that it would once again bring about some major problems that would need to be sorted. For example how would it be connected to the GPS and how much power would it use
Week 2
Summary of what has been researched during this week + Carnaval break
Note: We have not provided all links in this wiki yet, however, for every statement made below, a corresponding article exists in our group Google Docs file.
Our group has decided on specifically focusing on deplaying some kind of buoy in coral reefs. At first, our group was focussed on the different kind of variables that are able to be measured in the ocean/coral reefs. Some of these variables, and their respective sensors are:
Parameter
Sensor type
Representative sensors
Depth
Pressure sensor
SBE 41/41CP Argo CTD; Rockland Scientific MicroCTD; OTT CTD Sensor
We found that most of these variables are either already being measured by means of satelite imagery or by means of in situ (in person) data collection. Moreover, most of these variables are being measured only on the surface of the ocean, not in the depths.
Research has also been done in the effects that coral reefs have on the environment. The first, and often seen as largest impact, is that coral reefs serve as a habitat for a large veriaty of fish and other aquatic lifeforms. Secondly, coral reefs serve as wave dampeners, lessening the impact of, for example, large waves or even tsunamis. An lastly, a lot of people rely on coral reefs as a source of income.
We have also preemtively looked into the different stakeholders that our project could have. These include:
First party stakeholders
Marine researchers
Other stakeholders
The entire population (climate change)
The government
Second party climate researchers
Investors (could be government)
Furthermore, the idea of using a buoy on the ocean surface brings some technical challenges with it. It could have issues with sending/receiving data (communication in general), issues with battery life and energy generation, and lastly the difficult terrain of coral reefs.
Design that was chosen
Ultimately, it was decided that the best course of action would be to not focus in a specific variable to sense (because all important variables are already being sensed in some way), but focus on the way variables can be sensed. We have therefore come up with the idea of designing a buoy/base of operation which is able to lower a self chosen sensor (chosen by the researcher for the specific variable they want to sense) to a specific depth inside of a coral reef. This should be done in such a way that it does not disturb the local population and it should not damage its surroundings either. We will therefore focus our research on the movement part, as we noticed (as has also been said the the aforementioned sections) that almost all remote sensing technices used today focus on the surface of the water, rather than the depths, which is mostly done in situ. Therefore, we believe that this is an important to be able to do this remotely, to ultimately remove the need for human interaction with the coral reefs.
MoSCoW table
Must Have
Should Have
Could Have
Wont Have
(Salt) water proof
The ability to change the depth of the diver (The diver contains the sensors)
A way of avoiding damaging coral structures
The diver can clean the coral reef at the same time
The ability to float on water (The base of the buoy)
The ability to transmit data directly to some external server or computer in real time
The ability to share data with other buoys of the same type (swarm technology)
the ability to reach measuring depths for outer reefs (reaching depths of around 2000m)
High Visibility to avoid collisions with boats
An energy source to power itself (Self-powering)
Be easily accessible for repairs and other things which might need to
Diver can move actively through the water
To be able to reach the depths of the inshore coral reefs
Some way of keeping the buoy in the approximate same geographical location
The ability to configure and change which sensors can be put onto it so that the users can change out the sensors based on what they might want to specifically look at
Cable connection with base is made of glass fibre
The diver should be able to dive down straight below the base (perhaps not straight down but parallel to anchor)
Be made of renewable materials
Be build as cost effective as possible
A way for barnacles and others sealife don’t attach themselves to the device
Provide long term monitoring data
Be able to reach measuring depths of around 100m for inshore reefs. (10bar)
Should be able to carry sensors (the weight should be accounted for)
The buoy has a battery that in no way can harm its environment
The ability to move the “base”
Week 3
Focused MoSCoW table
This MoSCoW table focuses on the specific aspect of the problem statement that we are trying to solve which is based around the envisioned diver.
Must Have
Should Have
Could Have
Wont Have
(Salt) water proof
The ability to change the depth of the diver (The diver contains the sensors)
A way of avoiding damaging coral structures
The diver can clean the coral reef at the same time
The ability to float on water (The base of the buoy)
Some way of keeping the buoy in the approximate same geographical location
The ability to configure and change which sensors can be put onto it so that the users can change out the sensors based on what they might want to specifically look at
the ability to reach measuring depths for outer reefs (reaching depths of around 2000m)
To be able to reach the depths of the inshore coral reefs
The diver should be able to dive down straight below the base (perhaps not straight down but parallel to anchor)
Cable connection with base is made of glass fibre
Should be able to carry sensors (the weight should be accounted for)
Diver can move actively through the water
Initial design ideas
For the initial design ideas, see the designated images on the right side of this page.
Week 4
Idea 3
Solution encyclopedia for focused MoSCoW table
Problem
Possible solution(s)
(salt) water proof
- Adding saltwater proof paint around the base and diver
- Making the diver air tight to isolate electronics from the outside
The ability for the base to float on water
- Making the base large and light enough so that it has the ability to float on water
- Add inflatable material to the base
- The buoy should be able to displace the equivalent volume of water that equates to its volume. This can be done by have a combination of a solid material along with pockets of air to prevent the buoy from sinking due to its weight.
Being able to reach inshore depths
- Make the winch large enough and the wire long enough to reach such depths
- The wire should also be able withstand the pressure from the water and still work while also being able to lift the diver or support its weight - Make sure the diver is able to withstand inshore pressures
The ability to change the depth of the diver
- Use a winch to change the depth of the diver
- Implement small motors on the diver to change its own depth
- Use an automatic submarine like diver to get to the expected depths.
- Using the weight of the diver to move downwards and a propeller to allow the diver to move upwards easier or decrease the weight acting on the winch
Keeping the buoy in the same aproximate location
- Make use of an anchor attached to the base
- Have propellers and motors on the buoy that allows it to move and a GPS so that it can adjust its location if it moves too far
The diver should be able to dive down straight below the base
- Add a guiding ring to the diver to make sure it follows the anchor
- Make the diver move along the anchor line by means of some form of motor
Should be able to carry sensors
- Make the diver large enough to carry different types and sizes of underwater remote sensing equipment, while keeping the weight as low as possible
- Have enough connections to carry multiple types of sensors in the diver.
- Have The diver be more customisable instead of only being able to put sensors into a per-defined casing.
Method of validating out design
We are striving to be able to present a prototype of a diver that is able to move up and down a cable of some sorts. At the moment, it may be difficult to add a depth sensor to the device, as this would be too difficult to test. Therefore, to be able to correctly validate the actual workings of our device, we will also be trying to simulate certain aspects of the lowering contraption. The final measurable variables have not yet been decided, however, it is already clear that the depth sensor should be one of the more important ones. We will ultimately present our findings in a presentation. This will include a mock-up prototype for presentation purpose, a simulation to show the actual workings, and information gathered through research.
Week 5
Updated users
Stakeholder:
First party stakeholders:
Researchers, marine biologists, scientific divers
Other stakeholders:
The whole population due to emerging climate issues
The government
Funders
Second party climate researchers that benefit from the data aswell
Investors in the buoys
People who live at the seaside of coral reefs
Inventors/designers: Can sell patents for money, or design further. They also directly control how it operates.
First party stakeholders are the researchers that want to solve the problem that the government, population and people living at the seaside of the coral reef concern. The problem that concerns all these stakeholders is the importance of ocean protection.
Environmental protection is of great importance of all stakeholder including the government and the whole world population
The deep ocean absorbs vast amounts of heat and carbon dioxide, providing a critical buffer to climate change but exposing vulnerable ecosystems to combined stresses of warming, ocean acidification, deoxygenation, and altered food inputs. Resulting changes may threaten biodiversity and compromise key ocean services that maintain a healthy planet and human livelihoods.
Investors like the government would likely make the buoy as efficient as possible. Reduce the cost of the buoys and improve the impact. For both groups it is of great importance that the buoys measure accurate data and process these data.
The intelligent buoy could help in obtaining the following UN goals for sustainable development.
Life below water: Conserve and sustaianbly use the oceans, seas, and marine resources for sustainable development.
Climate action: Take urgent action to combat climate change and its impacts.
Goals of the questions asked to researchers
See interview page. Here, for each question that we as group 7 have asked, the reason for doing so has now been added. Furthermore, a quick summary has been given for our first participant to give and idea of how we interpretted the questions, and what we will do with the answers we have obtained.
Potential locations for our buoy
Ningaloo Reef - Australia
Type – Fringing Reef
It is still in good condition compared to other reefs
Average depths where the coral reefs are found – 30 to 40 meters deep
Average depth of the Ningaloo Lagoon – 2-4 meters deep (Not the coral reef)
Deepest point – around 150 meters
Area – 604 500 hectares
Total length along the shore – Around 260 km
50 percent of all coral reefs in Indian Ocean (around 300 species) found in the Reef
Around 750 species of fish
Around 600 species of crustaceans
1000 + species of algae
6/ 7 species of turtles visit or live around the coast
Many large marine animals (such as whales, sharks etc)
Ultimatley, we chose to make the primary location of our design, and consequently, our simulations, the great barrier reef (GBR). Firstly, the GBR one of the biggest reefs on the planet, so more information is being gathered on this location, making research about this place more available. Secondly, the GBR is also extremely threathened, meaning that a lot of researchers need to do measurements at this location for data gathering purposes. Because of this, our design of a new remote sensing idea might become more prevelant.
Forces on a buoy
Forces present on a buoy stationed somewhere on the GBR:
If we want to focus on the great barrier reef, this site gives a nice graphical representation of wind speeds at the great barrier reef. It does not specify at what height these wind measurements have been executed, but from my other research, I assume it is somewhere between 5-10 metres above sea level. Furthermore, I am not really able to find information regarding surface level wind speeds, though we can probably assume they will be somewhat smaller. The surface level (-1.5m) currents are also shown, which can be adjusted to -8.8m. These current speeds can be used to simulate water forces on the buoy. However, as I can’t really find data for areas lower than this, for simulation purposes, we may need to assume the currents at -8.8m as constant over all depth levels: https://ereefs.aims.gov.au/ereefs-aims/gbr4/temp-wind-salt-current#frame=Yearly;region=queensland-1
General forces acting on an object on top of the water surface:
Buoyance force: Fb = ρ * V * g
Gravitational force: Fg = m * g
Modified Designs
It was found out after receiving the answers to some of the interviews that the initial designs had a fundamental flaw which warranted a redesign. This flaw that was mentioned was that in many coral reefs, the use of anchors was banned due to their destructive nature when being deployed. The effect of anchors are mostly seen in areas such as coral reefs and seagrass beds where numerous marine flora rely on for shelter, food, etc. But due to the weight of anchors, such environments are very easy to destroy (1). When looking further into how they affect Coral reefs, it can be seen when just looking at corals that it is dependant on multiple factors. For example how often anchors are set down and what type of coral is around it. Some corals such as ‘massive corals’ (3) are more resistant to the affect of anchoring whereas the brittle branching corals and soft corals (1) are more susceptible to being destroyed. Furthermore, corals do not grow quickly, as such destroying can affect it for many years to come (generally massive corals grow up to 1 cm per year and branching corals up to 10 cm per year (2)). As such these new designs were thought of based on how to minimise the amount of damage such methods can include.
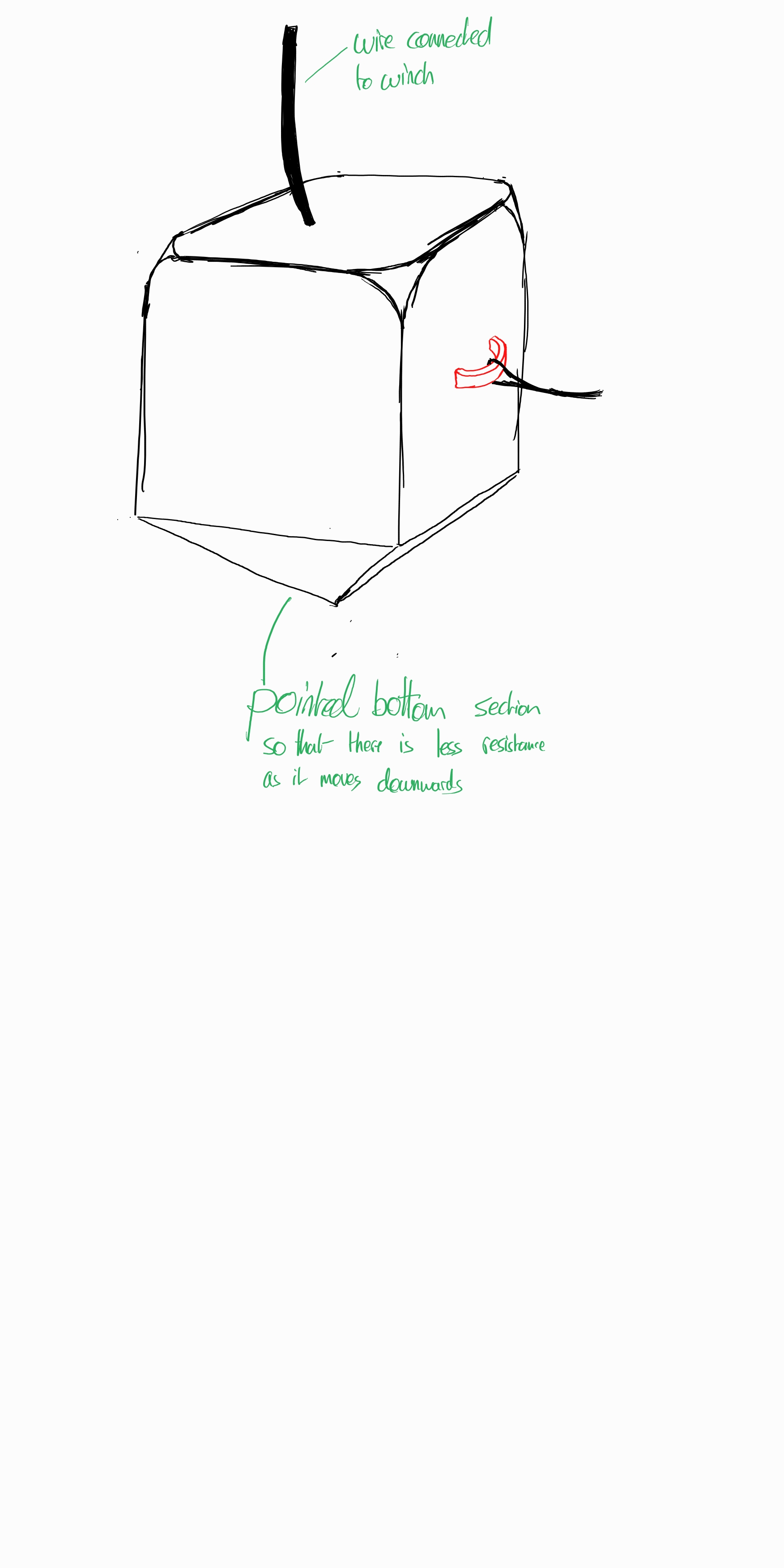
Idea 1
This first idea incorporated a type of common hook known as a reef hook which are generally considered to be much less damaging, this is because they are hooked onto ledges rather than relying on its weight to keep the buoy in place. The only issue I can see it that maybe larger marine animals such as sharks might have a more difficult moving between the reef hooks as this design encloses a small area to hook itself and stay in the relative correct location.
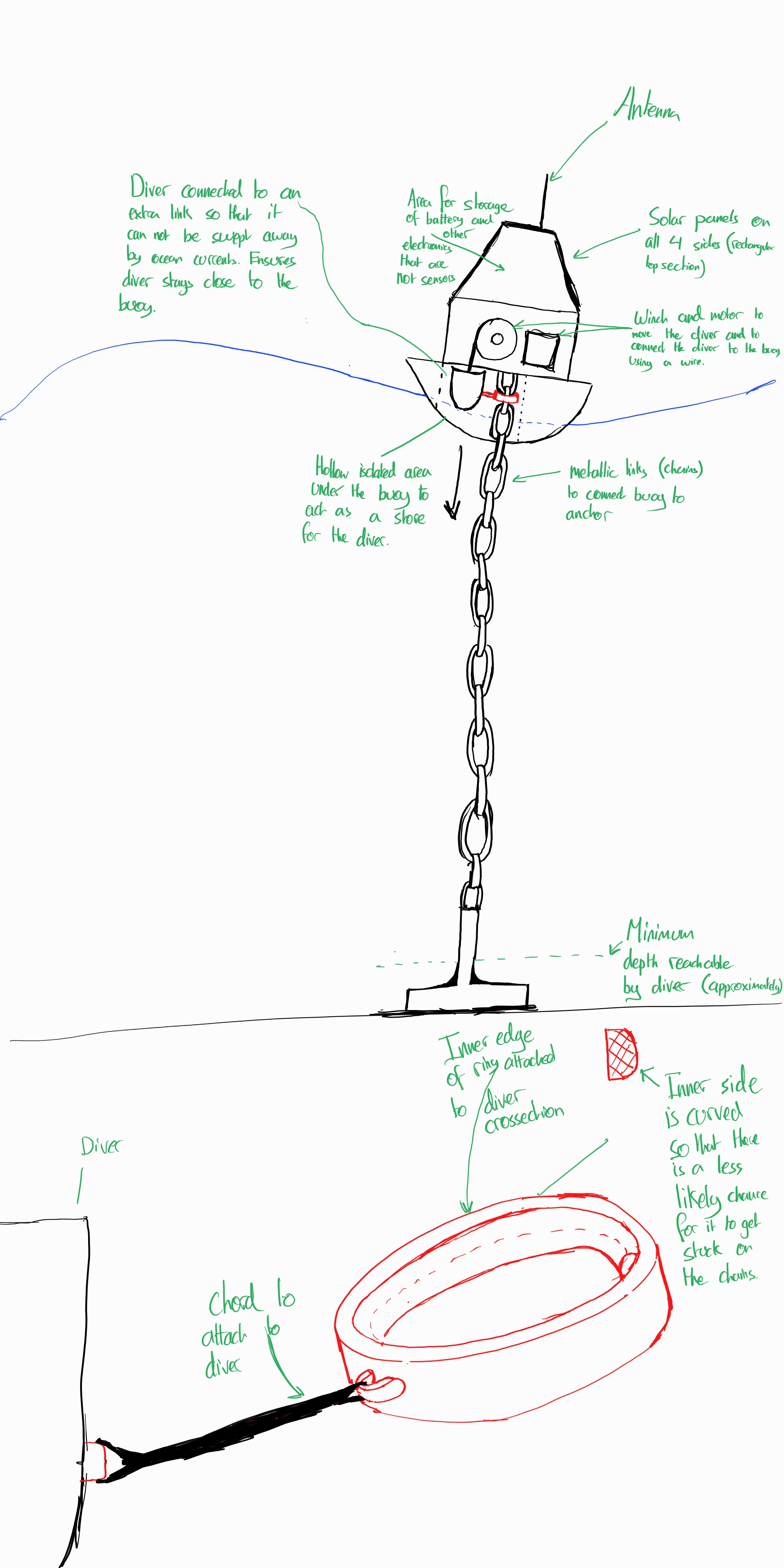
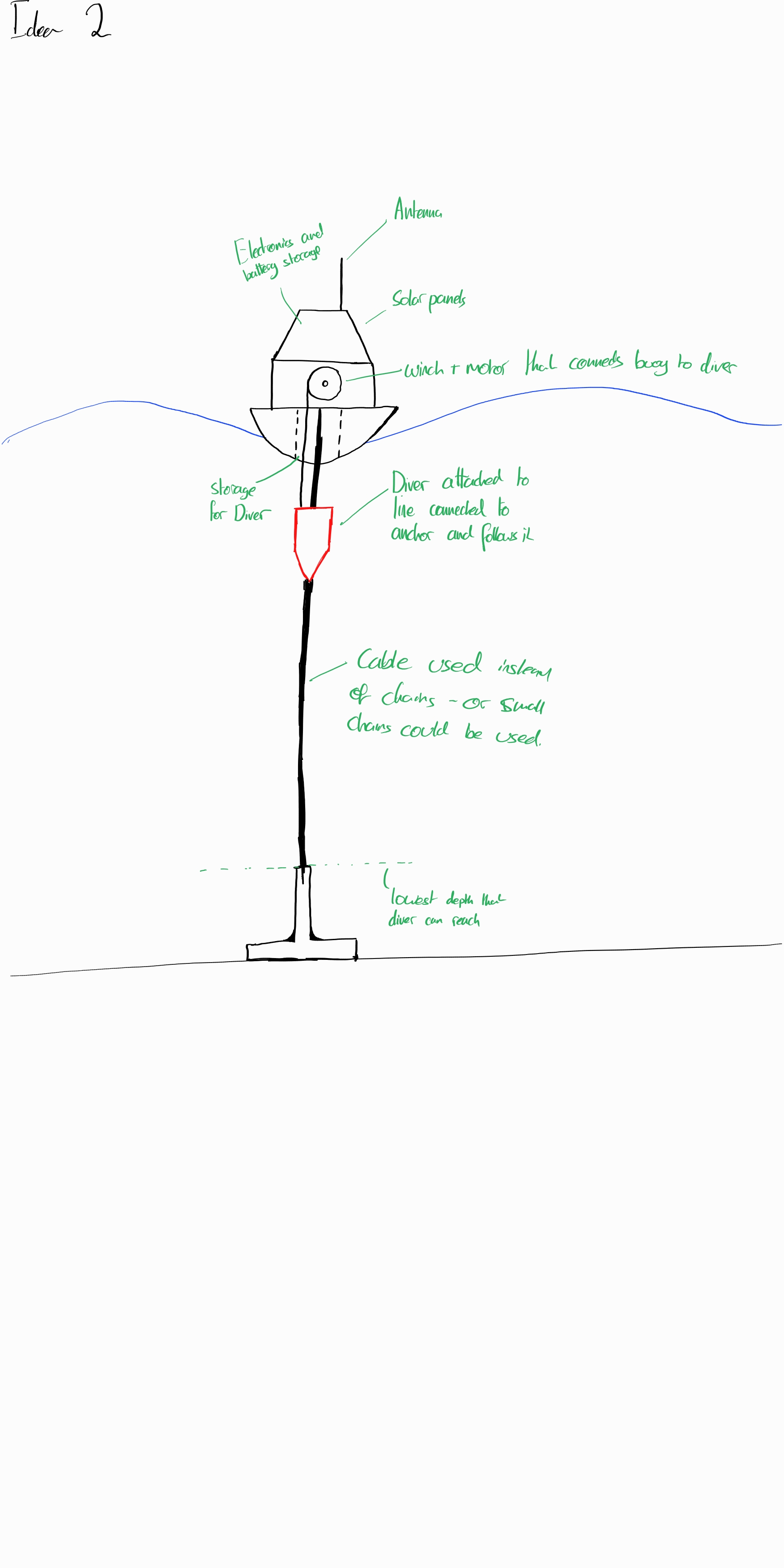
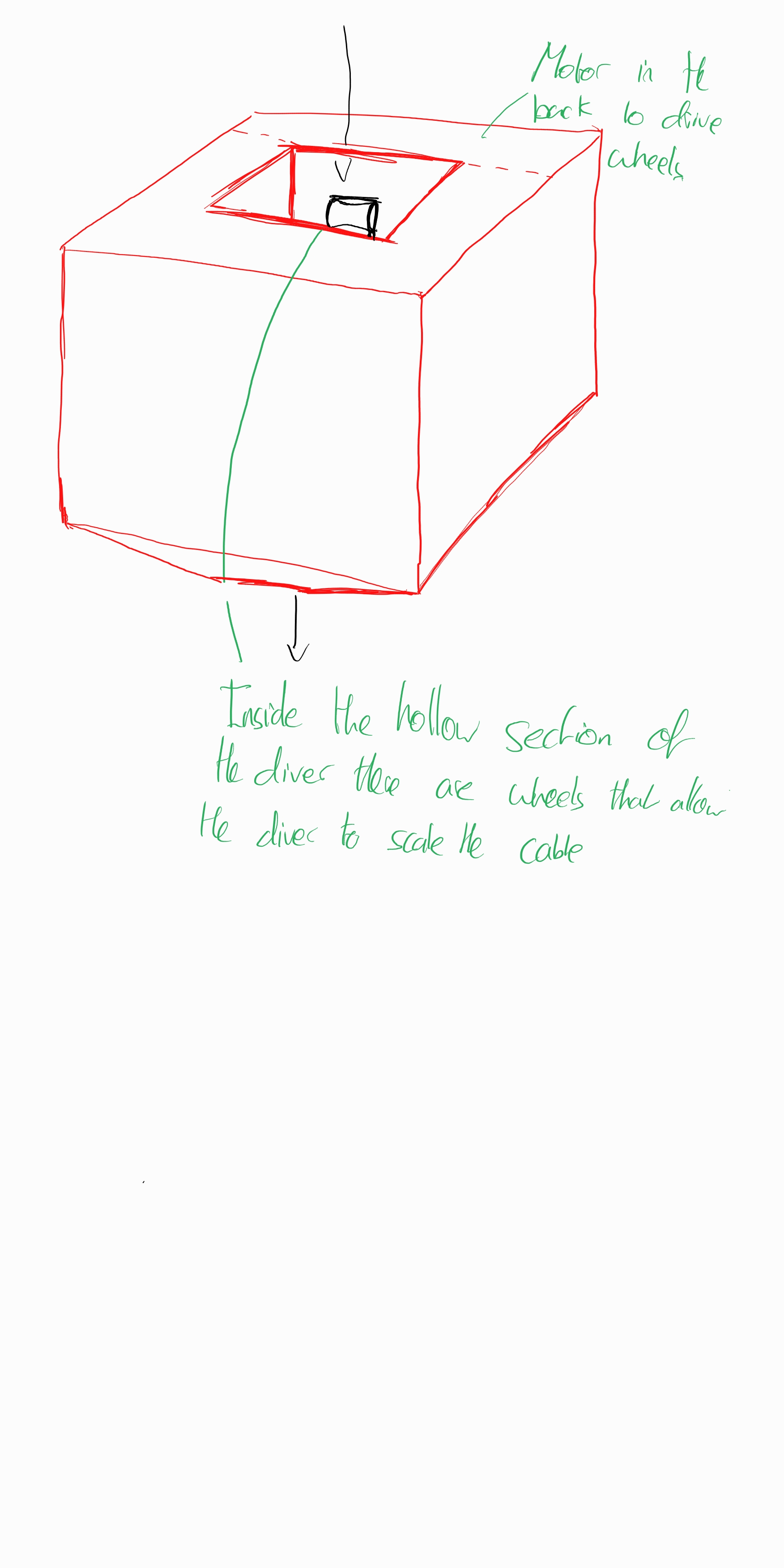
Idea 2
The second design focuses on an automatically moving buoy that will stay in the generally correct location with some leeway. This idea was thought of because coral reefs diminish the energy of waves by around 86 - 97% (4). As such the buoy would likely not be swept away very far by strong currents and large waves. The issue that could come with this buoy is that for it to be functional, it would require a lot of power such that it would be able to move, find its location and also run all the sensors and send the data received. Furthermore since a GPS is included, it might become more expensive as it would need a satellite to find its location.
Idea 3
This 3rd design focuses more so on changing the anchoring method such that it solves the problems from the previous designs. The first main difference is that it uses 4 separate reef hooks which would be attached to a single boulder such that it acts as a natural anchor which would not destroy the surrounding coral when compared to an anchor that would need to be deployed. Furthermore, it also does not require as much space underwater compared to the design with 3 Reef hooks. This would make it safer for larger marine animals to swim around such as sharks without having to weave through multiple lines. Finally, the buoy would not need to assign a large portion of its resources (specifically power) to staying in the relatively correct location. The main issue that can be seen is that this design would need prior research on the best location, looking for factors such as depth and if there is a suitable object underwater for the buoy to hooked onto to act as an anchor. Following this some other issues that would arise would be that the reefs hooks would have to be manually attached to the object once decided. This would restrict the maximum depth that the buoy can be deployed to.
No need to put this in yet but it is a useful sight to show how anchoring affects coral reefs and etc:
Maybe adding a camera as a sensor might be something that our design could benefit from, as it would remove the need for human activity in the area, but still be able to survey a specific location for prolonged periods of time. Furthermore, temperature measurements, or any other measurement mostly done by satellites, for depths lower than 20 metres are also more beneficial to be done underwater. Thus, altough most important variables can already be measured by means of satellite imagery (fully remote), or, alternatively, by unmanned aerial vehicles (fully remote) or boat based sensors (partially remote, they are not always as accurate as possible. These UAVs have the same issues as satellite sensing, that is mostly surface images. Whereas boats are able to do the same kind of measurements as our design, but they need manpower to operate, may disturb the creatures living in the coral reefs, and are not able to be stationed at a specific position for prolonged periods of time. From this, we can conclude that for researchers who want to have their measurements as acurate as possible, while focussing on a specific location, our design would be better then current remote sensing technologies.
How to design the diver
The diver needs to be designed correctly as it needs to be able to dive down to the specified depth without too many problems. It should also fit sensory the user would want
It will be expected to have 2 of these sensor in the diver
Mostly probes will be in the diver and data from these probes will be sent to the buoy
Which material should it be
Should it be light or a heavy material?
It should be good against salt water
It should be easy to manipulate if the design is rather complex (complex shape etc.)
It should withstand the pressure (also due to thickness of the diver)
Shape
It should dissipate as less as water to decrease buoyancy for which the diver can easy propagate the water
Archimedes principle: the buoyancy force is equal to the weight of the water the object is dissipating. -> it should be heavy enough; shape does not matter for this, only the density; if the volume and mass does not change, the buoyancy won’t change either (https://www.quora.com/Will-the-shape-of-an-object-affect-the-buoyant-force)
Fg=m g , Fb=fluidVg , Results in mV=fluidas longs as this holds it the thing will sink, the density is a function of the pressure which in turn is a function of depth: Equation on buoyancy - University physics (15th edition) page 401
How would a (human) diver install the buoy
The hook for our design may not damage the coral. Therefore it has to be installed and the coral can't be damaged. The first option is looking at a diver that goes down and install the hook to the bottom. But what are the restrictions? For recreational diving, compressed air is often used. However diving with this compressed air restricts divers to a maximum of 45 m depth due to narcotic effects of nitrogen and the toxic action of oxygen at increased pressures (1). Oxygen-helium gas has made it possible for divers to reach 600 m in depth but at 160 metres some symptoms of the high pressure nervous syndrome start to occur. Vomiting, nausea fatigue could occur. The diver needs days or even weeks to recover from this depending on the depth (1). So diving depths higher than 160 metres wouldn't be practical. Depths up to 100m are seen as the recommended technical diving limits but a diver has to have the Tec Trimix Diver course (2). For obtaining the Trimix Diver course a diver has to have the following criteria:
Be PADI Tec 50 or Tec Trimix 65 diver.
Have a minimum of 150 logged dives.
Are at least 18 years old.
Have a Medical Statement signed by a physician within the last 12 months.
The average depth of the world's oceans is 3790 metres (1). Comparing this with a hook that instals itself: