Embedded Motion Control 2014 Group 7: Difference between revisions
| Line 255: | Line 255: | ||
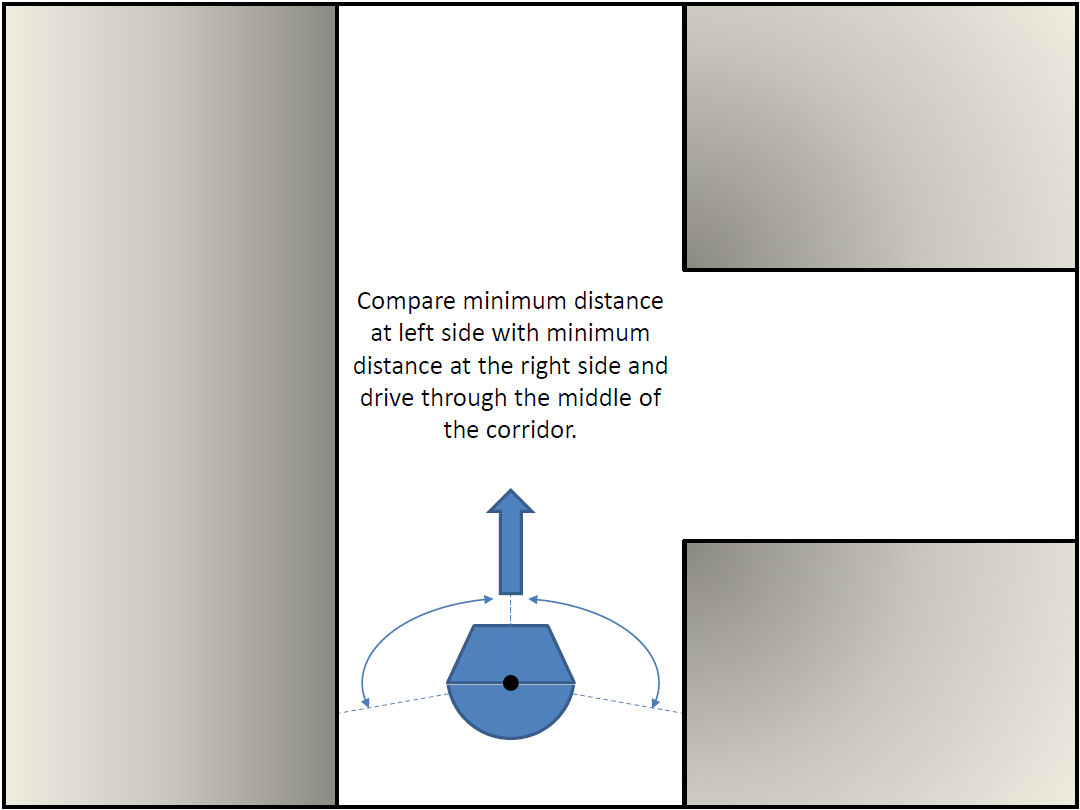
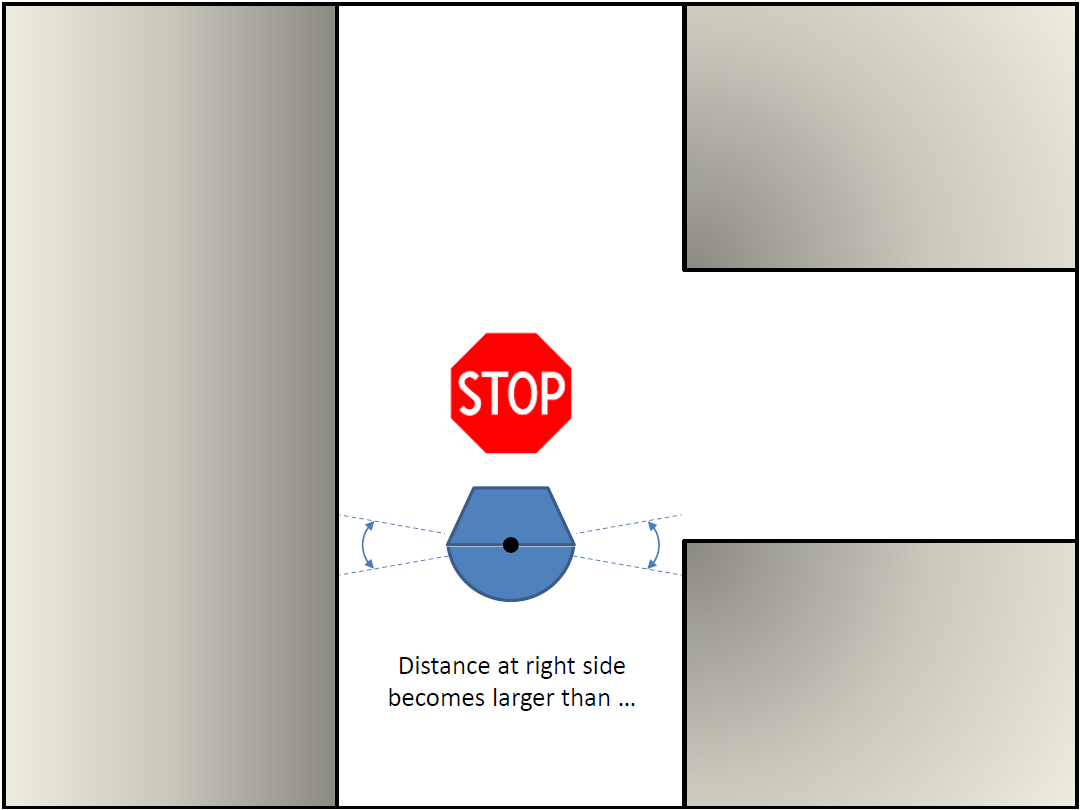
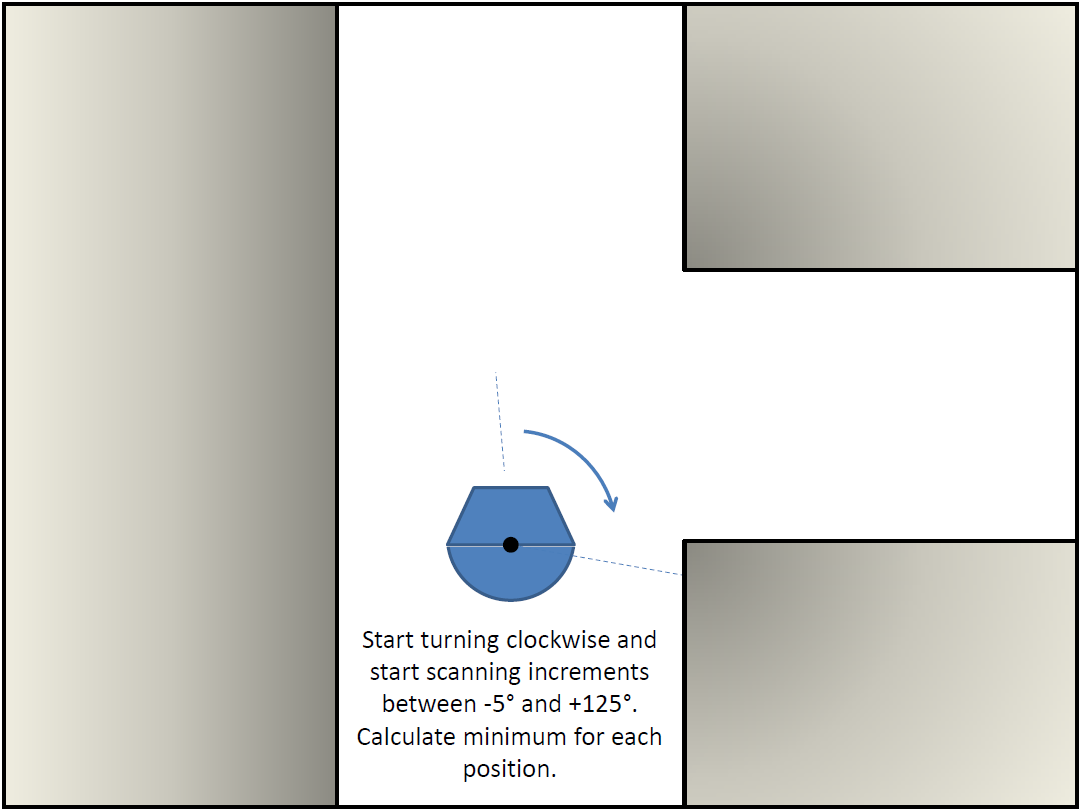
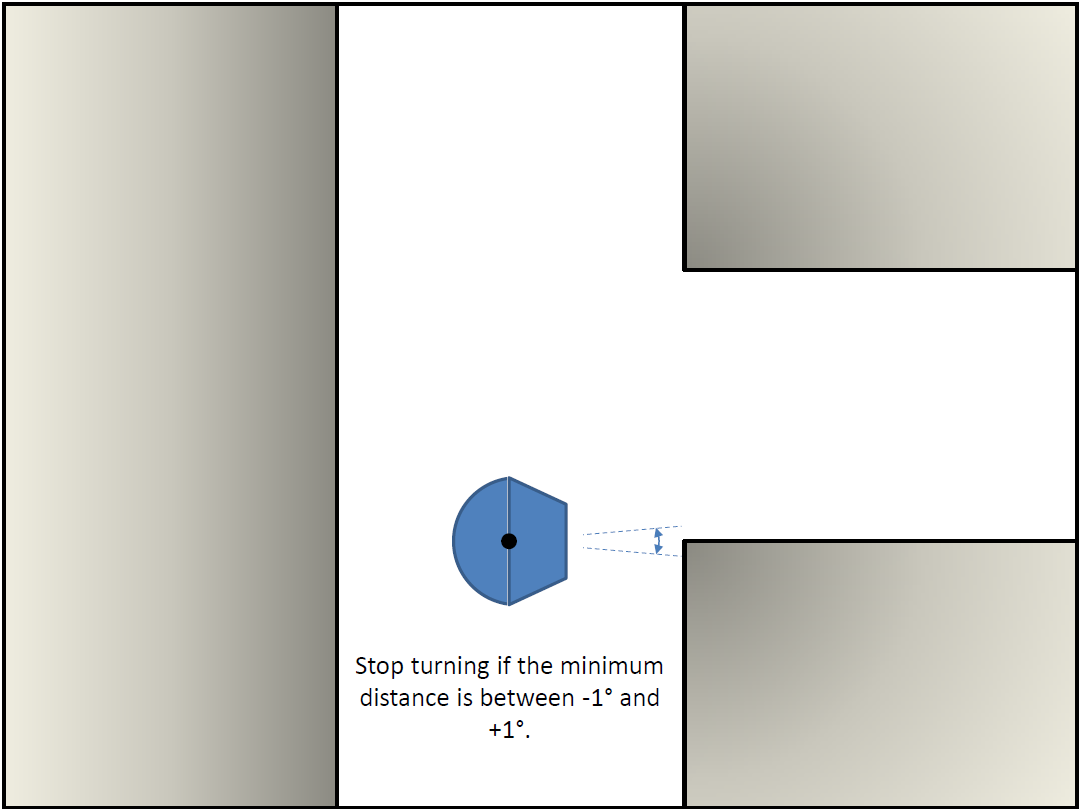
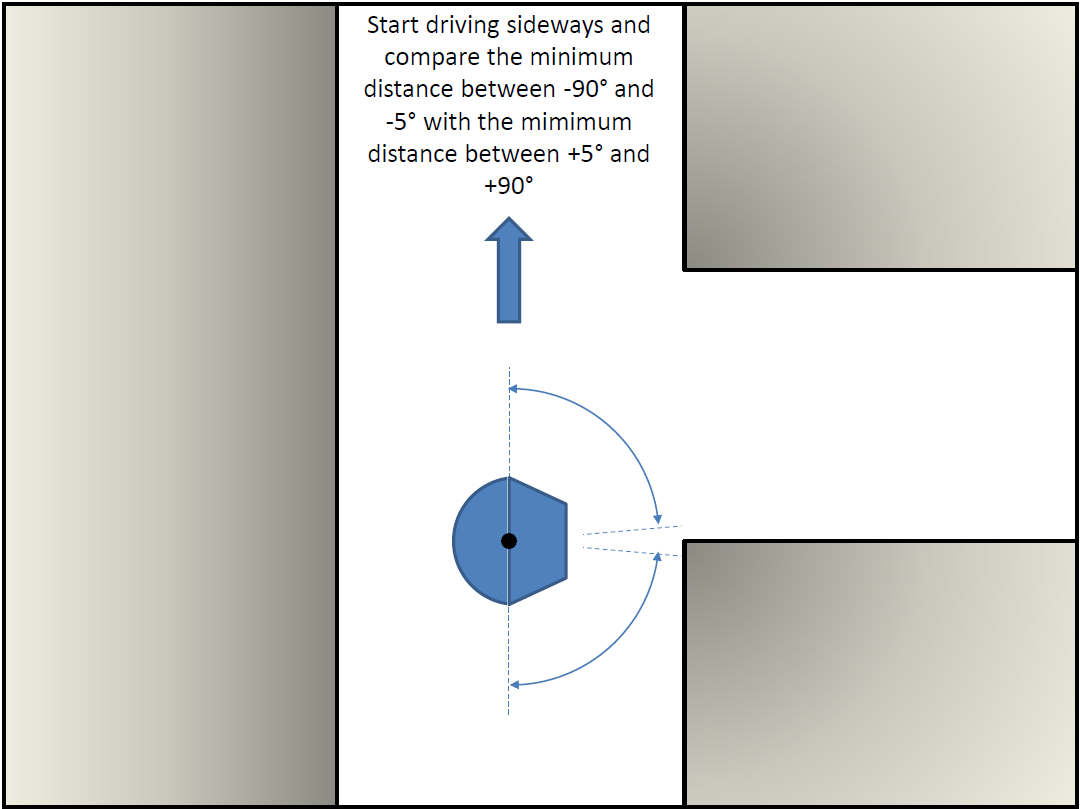
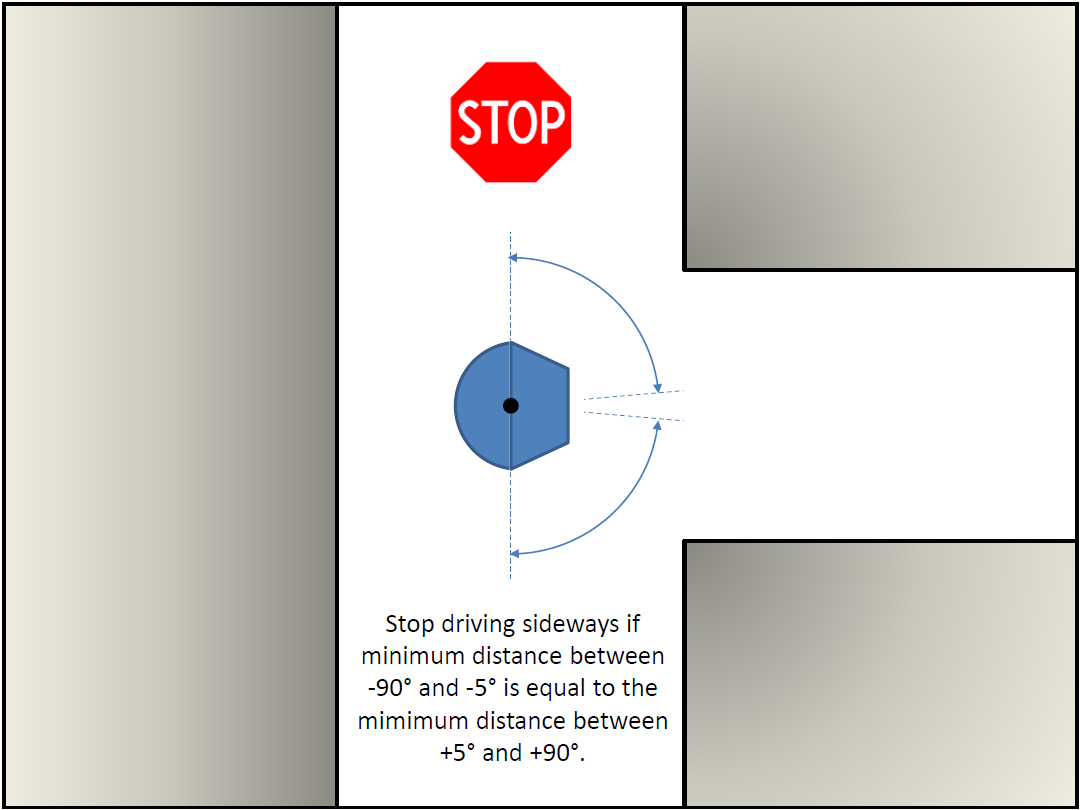
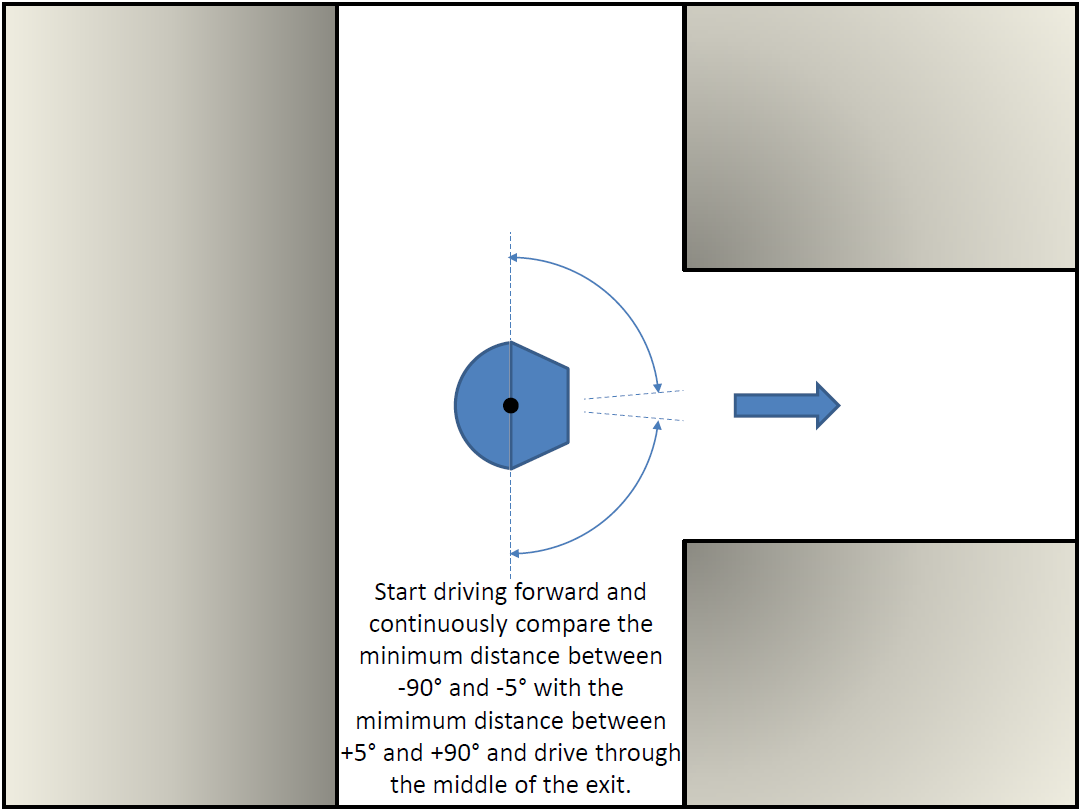
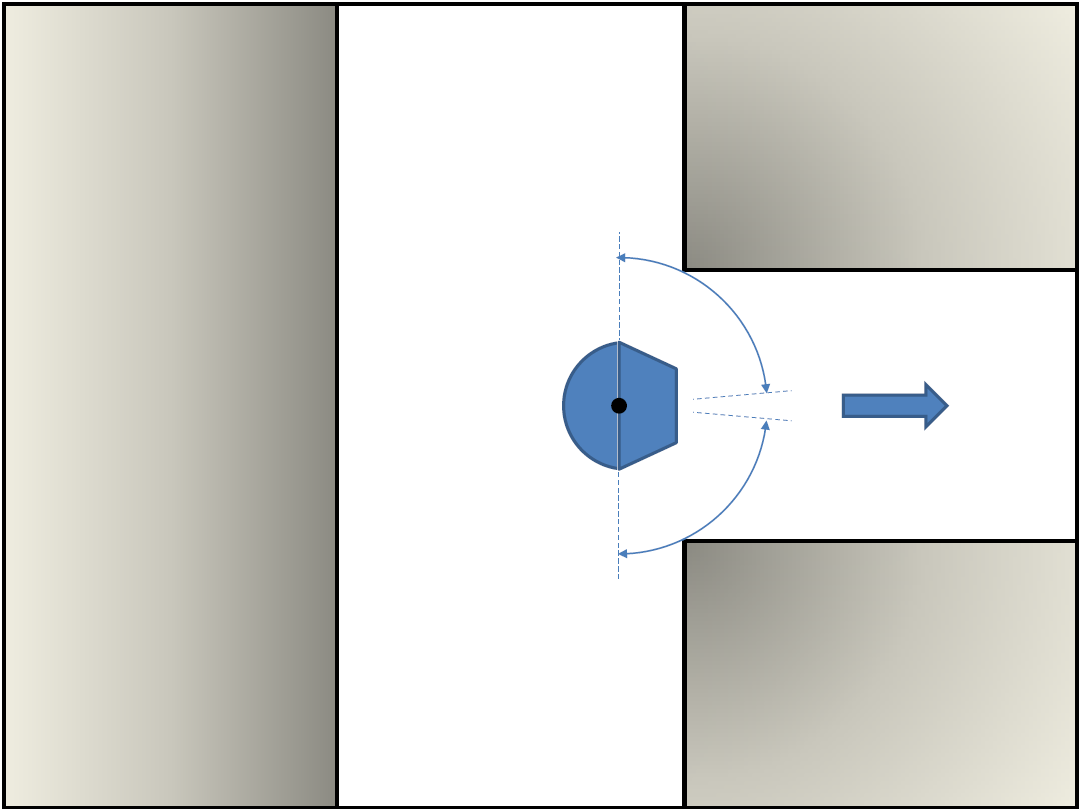
== Strategy for the Corridor Challenge == | == Strategy for the Corridor Challenge == | ||
<gallery mode=packed widths=300px perrow=4> | |||
File:emc07_2014_pro_cor_step1.png|Step 1. | |||
File:emc07_2014_pro_cor_step2.png|Step 2. | |||
File:emc07_2014_pro_cor_step3.png|Step 3. | |||
File:emc07_2014_pro_cor_step4.png|Step 4. | |||
File:emc07_2014_pro_cor_step5.png|Step 5. | |||
File:emc07_2014_pro_cor_step6.png|Step 6. | |||
File:emc07_2014_pro_cor_step7.png|Step 7. | |||
File:emc07_2014_pro_cor_step8.png|Step 8. | |||
</gallery> | |||
== GMapping / SLAM == | == GMapping / SLAM == | ||
Revision as of 13:55, 26 May 2014
Group members
| Name | |
|---|---|
| Maurice van de Ven | m dot l dot j dot v dot d dot ven @ student dot tue dot nl |
| Pim Duijsens | p dot j dot h dot duijsens @ student dot tue dot nl |
| Glenn Roumen | g dot h dot j dot roumen @ student dot tue dot nl |
| Wesley Peijnenburg | w dot peijnenburg @ student dot tue dot nl |
| Roel Offermans | r dot r dot offermans @ student dot tue dot nl |
Planning
| Week | Deadline | General plan | Groupmember | Specific task |
|---|---|---|---|---|
| 4 | 16-05-2014 | Complete Corridor Challenge | ||
| - - - - - | - - - - - | - - - - - | - - - - - | - - - - - |
| 5 | 19-05-2014 | Research Maze Strategies and define modules | ||
| 19-05-2014 before 10:45 h. | Roel | Research possibilities for wall and corner detection with OpenCV | ||
| 19-05-2014 before 10:45 h. | Glenn | Research possibilities for wall and corner detection with OpenCV | ||
| 19-05-2014 before 10:45 h. | Wesley | Research possibilities for arrow detection with OpenCV | ||
| 19-05-2014 before 10:45 h. | Maurice | Research possibilities for path planning and path tracker/driver | ||
| 19-05-2014 before 10:45 h. | Pim | Research possibilities for path planning and path tracker/driver | ||
| - - - - - | - - - - - | - - - - - | - - - - - | - - - - - |
| 6 | 26-05-2014 | Research functionality of ROS Packages: Gmapping and move_base | ||
| 28-05-2014 | Decide: use of packages or write complete new code | |||
| 30-05-2014 | Conceptual version of all modules are finished | |||
| - - - - - | - - - - - | - - - - - | - - - - - | - - - - - |
| 7 | 06-06-2014 | Integration of the modules | ||
| - - - - - | - - - - - | - - - - - | - - - - - | - - - - - |
| 8 | 13-06-2014 | Final presentation of the Maze Strategy | ||
| - - - - - | - - - - - | - - - - - | - - - - - | - - - - - |
| 9 | 20-06-2014 | Maze Competition |
Progress
| Name | Week 3 | Week 4 | Week 5 | Week 6 |
|---|---|---|---|---|
| Maurice van de Ven | All tutorials, not all C++ | |||
| Pim Duijsens | All tutorials, but not all C++ | |||
| Glenn Roumen | All tutorials | |||
| Wesley Peijnenburg | Tutorial #7 | |||
| Roel Offermans | All tutorials, not all C++ |
Time Table
| Lectures | Group meetings | Mastering ROS and C++ | Preparing midterm assignment | Preparing final assignment | Wiki progress report | Other activities | |
|---|---|---|---|---|---|---|---|
| Week 1 | |||||||
| Pim | 2 | ||||||
| Roel | 2 | ||||||
| Maurice | 2 | ||||||
| Wesley | 2 | ||||||
| Glenn | 2 | ||||||
| Week 2 | |||||||
| Pim | 2 | 2 | 4 | 3 | |||
| Roel | 0 | 2 | 10 | 6 | |||
| Maurice | 2 | 2 | 6 | 3 | |||
| Wesley | 2 | 2 | 4 | 2 | |||
| Glenn | 2 | 2 | 5 | 2 | |||
| Week 3 | |||||||
| Pim | 2 | 1 | 12 | 2 | |||
| Roel | 2 | 4 | 10 | 2 | |||
| Maurice | 3 | 10 | 4 | ||||
| Wesley | 2 | 3 | 10 | 1 | |||
| Glenn | 2 | 2 | 13 | 4 | |||
| Week 4 | |||||||
| Pim | 2 | 5 | 1 | 7 | 3 | ||
| Roel | 2 | 5 | |||||
| Maurice | 5 | 15 | |||||
| Wesley | 2 | 5 | 9 | 1 | |||
| Glenn | 2 | 5 | 6 | 1 | |||
| Week 5 | |||||||
| Pim | 2 | 2.5 | 7 | 0.5 | |||
| Roel | |||||||
| Maurice | 2 | ||||||
| Wesley | 2 | 5 | 7 | 3 | |||
| Glenn | 2 | ||||||
| Week 6 | |||||||
| Pim | |||||||
| Roel | |||||||
| Maurice | |||||||
| Wesley | |||||||
| Glenn | |||||||
Different nodes and flow chart

Strategy for the Corridor Challenge
-
 Step 1.
Step 1. -
 Step 2.
Step 2. -
 Step 3.
Step 3. -
 Step 4.
Step 4. -
 Step 5.
Step 5. -
 Step 6.
Step 6. -
 Step 7.
Step 7. -
 Step 8.
Step 8.








GMapping / SLAM
GMapping is being investigated as SLAM algorithm.
In order to run GMapping and transform the base_frame correctly, the following command should be used;
rosrun gmapping slam_gmapping scan:=/pico/laser _base_frame:=/pico/base_link
Viewing tf tree:
$ rosrun tf view_frames
Runnig Gmapping and move_base for simulations:
1. Start Gazebo:
$ gazebo
2. Using another terminal, spawn the maze:
$ rosrun gazebo_map_spawner spawn_maze
3. Launch PICO:
$ roslaunch pico_gazebo pico.launch
4. Start RViz to visualize how PICO perceives the world through its sensors.
$ rosrun pico_visualization rviz
5. Launch the gmapping plugin for PICO
$ roslaunch pico_2ndnav gmap.launch
6. Launch the move_base package for PICO to navigate through the maze with the preferred settings.
$ roslaunch pico_2ndnav move_base.launch
Remarks
In local_costmap_params.yaml static_map should be false. (As a local costmap should not be static, it moves with the robot)
In costmap_common_params.yaml inflation_radius should probably be smaller than 0.55, the robot has a much smaller radius (in safe_drive we used 0.25 if i remember correctly?)
In pico_configuration.launch We should look very closely to the pkg and type that are used (for example, shouldn't the types end with .msg). Furthermore, it seems like it wants to run the messages as an executable, this is probably not our intention).