Embedded Motion Control/Restaurant Competition 2023: Difference between revisions
mNo edit summary Tag: 2017 source edit |
No edit summary Tag: 2017 source edit |
||
| Line 84: | Line 84: | ||
An example map (PNG) for the restaurant challenge with more tables is provided here: [[:File:ExampleRestaurantMap.png]]. | An example map (PNG) for the restaurant challenge with more tables is provided here: [[:File:ExampleRestaurantMap.png]]. | ||
<div class="mw-collapsible mw-collapsed" style="width:700px; overflow:auto;"> | <div class="mw-collapsible mw-collapsed" style="max-width:700px; overflow:auto;"> | ||
The corresponding data that you could use in a JSON-file is provided here (click 'Expand'): | The corresponding data that you could use in a JSON-file is provided here (click 'Expand'): | ||
<div class="mw-collapsible-content"> | <div class="mw-collapsible-content"> | ||
Revision as of 10:53, 12 June 2023

Challenge Description
The figure on the right shows a 2D representation of a possible Restaurant setup, as an example. The objective is for Hero to "deliver" orders from the kitchen to a few tables. Which tables must be reached and in what order will be defined by the judges just before the challenge starts. The restaurant will contain a number of unknown static and dynamic objects (boxes, human actors walking)
Hero will be equipped with a basket in which he will carry the orders. The delivery of an order is defined as follows
- Drive up to the table.
- Position near the table, facing towards the table. The robot should be close enough for a customer to comfortably take their order from the tray. The exact part of the table that the robot stands next to does not matter.
- Give a clear sound signal, signalling Hero has arrived at table A (io.speak("I arrived at table four")).
- Repeat until all the tables are visited in the correct order (your robot does not need to return to the starting point)
Environment Specifications
- All walls in the restaurant will be approximately straight. No weird curving walls.
- The tables can be regarded to be solid objects that will show up as rectangles in the LiDAR measurements (So you won't have to detect the table's legs).
- The doors inside the restaurant will be openings in the walls of about 0.5-1m that may be closed or open.
- There may be multiple routes to a given goal.
- A number of dynamic objects will be present in the form of human actors. Additionally, a number of static objects will be placed throughout the restaurant (including possible chairs next to the tables!). The position does not have to be parallel to the walls.
Challenge Conditions
- Hero will start in the start area, defined by a rectangle of approximately 1 by 1 meters. The orientation of Hero is arbitrary (i.e., not known to your software).
- The list of tables to be visited will be provided right before the challenge starts as a list of integers (0 identifies the first table in the array).
- After starting the software, Hero has to drive to the first table to deliver the order.
- If Hero found the correct table and signalled his arrival, he has to drive to the next tables to deliver the orders.
- The task is completed after Hero visited all tables on the list.
- Bonus points are given to the groups that can detect the static and dynamic objects and present them in the world model. How this is presented is left to the groups.
- Within the restaurant start area, we will make sure that some visible features (i.e. lines, corners) remain visible.
- An actual map of the restaurant will be provided to the teams one week before the final challenge, this will encompass a vector map and a gridmap (an example is provided at the bottom of this section).
Challenge Rules
- The list of tables to visit has to be supplied to the executable when starting the challenge, in the following format (for tables in the order: 2 -> 4 -> 3):
./hero_do_your_thing 2 4 3
- Do not touch the walls or objects! Slightly touching is allowed, however, bumping (i.e., driving head-on into a wall) is not allowed! If Hero hits the wall, we decide whether it counts as bumping.
- Every team has two trials (= max one restart). A trial ends if:
- Hero bumps into: the wall, a static or a dynamic object.
- Hero has not moved or has not made sensible movements (as judged by the tutors) for 30 seconds
- The total time limit of 10 minutes per group is reached
- The group requests a restart (on the first trial)
- restart means:
- Hero restarts at the defined start position
- The trail time (= the time graded) is reset, but
- the total time keeps running
- Maximum speed (is limited in Hero): 0.5 m/s translational, 1.2 rad/s rotational.
- There will be no second attempt if first attempt was successful
- Every situation that might occur, that is not covered in this document will be evaluated on the spot. If this happens, the judges have the final word.
Robot Software
- Make sure your software is easy to set-up, i.e:
- Your software can be updated with one easy command, e.g. 'git pull'
- Your software can be compiled using 'cmake' and 'make'
- It is allowed to use multiple executables.
- If your set-up deviates from this method, let your tutor know 1 week before the challenge!
- The software of all groups will be updated on the robot before the challenge starts
- This way, teams starting the challenge have as much time as teams that do the challenge at the end, compiling in between trials is not allowed.
Example map format and code
- We provide a simple example of a room with two tables and the code to read the map into your own C++ code.
- For this simple example, a simulator map is also provided. (Note: a simulator map will not be provided for the final challenge).
- We used the 20cm thickness blocks for your convenience
- Remember to add unknown objects to your simulator and test environments and/or create other challenging maps and test scenarios!
You can find an example map (JSON) and the code to get you started here: File:Mrc map format 2021.zip
-
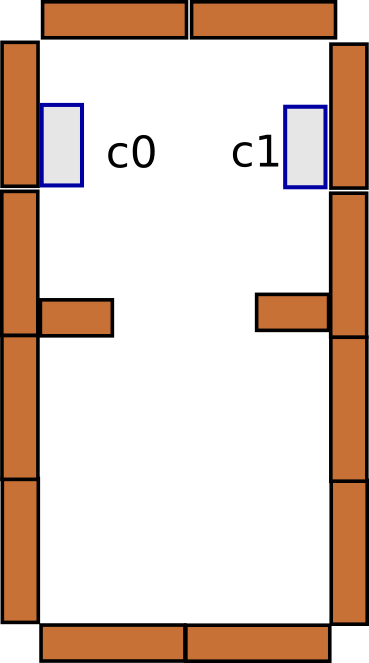 Overview of example map.
Overview of example map. -
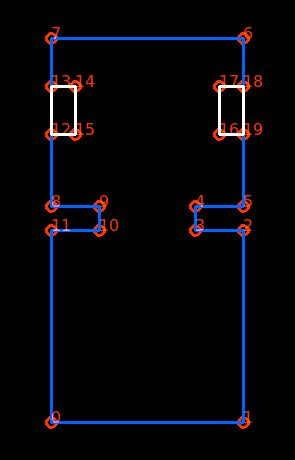 Visualisation of vector map.
Visualisation of vector map. -
 Bitmap representation of map, used for simulator (see zip file).
Bitmap representation of map, used for simulator (see zip file).



An example map (PNG) for the restaurant challenge with more tables is provided here: File:ExampleRestaurantMap.png.
{kind=link}
The corresponding data that you could use in a JSON-file is provided here (click 'Expand'):
{
"tables":[
[
[29, 35],
[35, 34],
[34, 28],
[28, 29]],
[
[45, 47],
[47, 46],
[46, 44],
[44, 45]],
[
[33, 32],
[32, 21],
[21, 22],
[22, 33]],
[
[48, 49],
[49, 59],
[59, 58],
[58, 48]],
[
[26, 24],
[24, 25],
[25, 27],
[27, 26]],
[
[42, 36],
[36, 37],
[37, 43],
[43, 42]],
[
[50, 51],
[51, 62],
[62, 61],
[61, 50]]
],
"walls":[
[0, 1],
[1, 8],
[8, 2],
[2, 0],
[2, 3],
[3, 55],
[55, 54],
[54, 2],
[7, 8],
[8, 64],
[64, 63],
[63, 7],
[54, 56],
[56, 66],
[66, 65],
[65, 54],
[57, 60],
[60, 68],
[68, 67],
[67, 57],
[61, 64],
[64, 70],
[70, 69],
[69, 61],
[13, 14],
[14, 19],
[19, 18],
[18, 13],
[15, 16],
[16, 23],
[23, 20],
[20, 15],
[11, 12],
[12, 31],
[31, 30],
[30, 11],
[6, 10],
[10, 17],
[17, 9],
[9, 6],
[38, 40],
[40, 41],
[41, 39],
[39, 38]
],
"doors":[
[
[4, 5],
[5, 12],
[12, 11],
[11, 4]],
[
[30, 31],
[31, 39],
[39, 38],
[38, 30]]
],
"start_area":[
[
[52, 53],
[53, 67],
[67, 66],
[66, 52]]
],
"points":[
{"x": 0.0, "y": 5.0, "_comment": 0 },
{"x": 6.0, "y": 5.0, "_comment": 1 },
{"x": 0.0, "y": 4.8, "_comment": 2 },
{"x": 0.2, "y": 4.8, "_comment": 3 },
{"x": 3.7, "y": 4.8, "_comment": 4 },
{"x": 3.9, "y": 4.8, "_comment": 5 },
{"x": 5.1, "y": 4.8, "_comment": 6 },
{"x": 5.8, "y": 4.8, "_comment": 7 },
{"x": 6.0, "y": 4.8, "_comment": 8 },
{"x": 4.8, "y": 4.5, "_comment": 9 },
{"x": 5.8, "y": 4.1, "_comment": 10 },
{"x": 3.7, "y": 4.0, "_comment": 11 },
{"x": 3.9, "y": 4.0, "_comment": 12 },
{"x": 0.2, "y": 3.8, "_comment": 13 },
{"x": 1.5, "y": 3.8, "_comment": 14 },
{"x": 2.3, "y": 3.8, "_comment": 15 },
{"x": 3.7, "y": 3.8, "_comment": 16 },
{"x": 5.5, "y": 3.8, "_comment": 17 },
{"x": 0.2, "y": 3.6, "_comment": 18 },
{"x": 1.5, "y": 3.6, "_comment": 19 },
{"x": 2.3, "y": 3.6, "_comment": 20 },
{"x": 2.4, "y": 3.6, "_comment": 21 },
{"x": 2.9, "y": 3.6, "_comment": 22 },
{"x": 3.7, "y": 3.6, "_comment": 23 },
{"x": 4.8, "y": 3.6, "_comment": 24 },
{"x": 5.8, "y": 3.6, "_comment": 25 },
{"x": 4.8, "y": 3.1, "_comment": 26 },
{"x": 5.8, "y": 3.1, "_comment": 27 },
{"x": 0.2, "y": 3.0, "_comment": 28 },
{"x": 1.2, "y": 3.0, "_comment": 29 },
{"x": 3.7, "y": 3.0, "_comment": 30 },
{"x": 3.9, "y": 3.0, "_comment": 31 },
{"x": 2.4, "y": 2.6, "_comment": 32 },
{"x": 2.9, "y": 2.6, "_comment": 33 },
{"x": 0.2, "y": 2.5, "_comment": 34 },
{"x": 1.2, "y": 2.5, "_comment": 35 },
{"x": 4.8, "y": 2.3, "_comment": 36 },
{"x": 5.8, "y": 2.3, "_comment": 37 },
{"x": 3.7, "y": 2.2, "_comment": 38 },
{"x": 3.9, "y": 2.2, "_comment": 39 },
{"x": 3.7, "y": 1.8, "_comment": 40 },
{"x": 3.9, "y": 1.8, "_comment": 41 },
{"x": 4.8, "y": 1.8, "_comment": 42 },
{"x": 5.8, "y": 1.8, "_comment": 43 },
{"x": 0.2, "y": 1.7, "_comment": 44 },
{"x": 1.2, "y": 1.7, "_comment": 45 },
{"x": 0.2, "y": 1.2, "_comment": 46 },
{"x": 1.2, "y": 1.2, "_comment": 47 },
{"x": 2.4, "y": 1.2, "_comment": 48 },
{"x": 2.9, "y": 1.2, "_comment": 49 },
{"x": 4.6, "y": 1.2, "_comment": 50 },
{"x": 5.1, "y": 1.2, "_comment": 51 },
{"x": 1.2, "y": 1.0, "_comment": 52 },
{"x": 2.2, "y": 1.0, "_comment": 53 },
{"x": 0.0, "y": 0.2, "_comment": 54 },
{"x": 0.2, "y": 0.2, "_comment": 55 },
{"x": 1.2, "y": 0.2, "_comment": 56 },
{"x": 2.2, "y": 0.2, "_comment": 57 },
{"x": 2.4, "y": 0.2, "_comment": 58 },
{"x": 2.9, "y": 0.2, "_comment": 59 },
{"x": 3.6, "y": 0.2, "_comment": 60 },
{"x": 4.6, "y": 0.2, "_comment": 61 },
{"x": 5.1, "y": 0.2, "_comment": 62 },
{"x": 5.8, "y": 0.2, "_comment": 63 },
{"x": 6.0, "y": 0.2, "_comment": 64 },
{"x": 0.0, "y": 0.0, "_comment": 65 },
{"x": 1.2, "y": 0.0, "_comment": 66 },
{"x": 2.2, "y": 0.0, "_comment": 67 },
{"x": 3.6, "y": 0.0, "_comment": 68 },
{"x": 4.6, "y": 0.0, "_comment": 69 },
{"x": 6.0, "y": 0.0, "_comment": 70 }
]
}
You can use the following settings (resolution etc.) in your YAML-file:
image: ExampleRestaurantMap.png #include the (relative) path to where you put the PNG-file resolution: 0.0125 origin: [0.0, 0.0, 0.0] occupied_thresh: 0.9 free_thresh: 0.1 negate: 0
A distorted version of this map, with slightly displaced walls and tables and some added obstacles, is provided here: File:ExampleRestaurantMapDistorted.png.
{kind=link}