Retake Embedded Motion Control 2018 Nr3: Difference between revisions
| (185 intermediate revisions by the same user not shown) | |||
| Line 22: | Line 22: | ||
= The challenge ‘Follow me!’ = | = The challenge ‘Follow me!’ = | ||
'''The main goal''' is to follow Person Of Interest (POI) in a cluttered environment. The person closest to PICO is the POI at standstill. The POI will walk a pre-defined route that’s unknown to the PICO. There are targets strip which the POI will cross in the middle. To prove whether PICO is able to follow the POI correctly, PICO should also cross these target strips. A overview of the setup is shown on Figure 1. | '''The main goal''' is to follow the Person Of Interest (POI) in a cluttered environment. The person closest to PICO is the POI at standstill. The POI will walk a pre-defined route that’s unknown to the PICO. There are targets strip which the POI will cross in the middle. To prove whether PICO is able to follow the POI correctly, PICO should also cross these target strips. A overview of the setup is shown on Figure 1. | ||
The are also other actors present in the area of interest. These actors will similarly as the POI start at standstill. | The are also other actors present in the area of interest. These actors will similarly as the POI start at standstill. | ||
| Line 82: | Line 82: | ||
* Obtain information: Using the obtain information function sensor readings can be requested. The input for this function is the request of a (sub)set of sensor data from a specific sensor(set), either the Laser Range Finder (LRF) or the odometry encoders. | * Obtain information: Using the obtain information function sensor readings can be requested. The input for this function is the request of a (sub)set of sensor data from a specific sensor(set), either the Laser Range Finder (LRF) or the odometry encoders. | ||
<u> Skill | <u> Skill functions: </u> | ||
*Threshold filters: Find clusters, look at the difference angle and/or radius between the laser points, see Section 4.1. | |||
<u> Task | *Find POI: Find the nearest person in the initial face, see Section 4.1. | ||
*Middle points calculations: Calculate the average position of each cluster, see Section 4.1. | |||
*Nearest Neighbor: Find new POI setpoint, see Section 4.3. | |||
<u> Task functions:</u> | |||
*Initial find POI: Find the nearest person in the initial face, see Section 4.1. | |||
*Follow algorithm: with the world model, skill functions and motion functions can this achieved. | |||
<u><b> Components: </b></u> | <u><b> Components: </b></u> | ||
To be able to execute the Follow me! | To be able to execute the 'Follow me!' challenges the PICO robot, already mentioned above, will be used. The following hardware components will be utilized: | ||
<u>Actuators:</u> | <u>Actuators:</u> | ||
| Line 96: | Line 101: | ||
<u>Sensors:</u> | <u>Sensors:</u> | ||
*Laser range finder (LRF): To detect the distances to objects in the environment. | *Laser range finder (LRF): To detect the distances to objects in the environment. | ||
*Range: To be determined | *Range: To be determined. | ||
*Field of view: 270 degrees | *Field of view: 270 degrees. | ||
*Accuracy: To be determined | *Accuracy: To be determined. | ||
<u>Computer:</u> running Ubuntu 16.04. | <u>Computer:</u> running Ubuntu 16.04. | ||
''' The interface: ''' | |||
The interfaces describe the data that is communicated between the several parts of code. The functions that are discussed in the Chapter Functions are all part of the interface. In the interface there is also a world model. The world model will contain the most recent POI setpoint and the LFR data.The motion, skill and task functions can monitor and request the information that is stored in this world model and use it to properly execute their function. The interface is shown in Figure 3. | |||
[[File:Interfaces Follow me2.png|center|thumb|650px|Image: 650 pixels|Figure 3: Flowchart: Interfaces.]] | |||
= Software explanation = | = Software explanation = | ||
The software is subdivided in two main parts, Find POI, POI following algorithm. They are described below. | The software is subdivided in two main parts, Find POI, POI following algorithm (on person on the field) and POI following algorithm (with other persons on the field) . They are described in the Subsections below. | ||
==Code snippets== | |||
* [https://gitlab.tue.nl/EMC2018/EMC_Retake03/snippets/65 WorldModel] | |||
* [https://gitlab.tue.nl/EMC2018/EMC_Retake03/snippets/66 Motion.cpp] | |||
* [https://gitlab.tue.nl/EMC2018/EMC_Retake03/snippets/67 FindPOI.cpp] | |||
==Find POI== | ==Find POI== | ||
First PICO has to find POI. The structure of the software of these classes is shown in Figure | First PICO has to find POI. The structure of the software of these classes is shown in Figure 4. | ||
With the | With the LRF data is it possible to find something, i.e, a person, a objects, a wall or disturbance. The LRF data is split into clusters. A cluster is a series of laser points, which are connected to each other. Afterwards it must be determined whether the cluster is, the POI, a person/object/wall or disturbance. | ||
Clusters can be found with threshold filters for the angle and radius between laser points. | |||
If the angle between laser points are larger than constant1 or/and the distance between laser points are larger then constant2 then a new cluster is found. If a cluster is larger than constant3 then a person, object or wall is found otherwise it is disturbance. A single cluster contains of a "middle point" which has an x and y coordinate and count of the number of laser points in the cluster: | |||
<math>pos_x = sum_x/count</math> | |||
<math>pos_y = sum_y/count</math> | |||
where sum_x and sum_y are the summation of all the x/y coordinates of the laser points in the current cluster. | |||
These clusters are then converted to actual setpoints, the cluster of the person that has the smallest distance between the previous setpoint and PICO is the POI. This will be explained in further detail in POI following algorithm (with other persons on the field). | |||
Note 1: At the start there is a person nearest PICO not something else. | |||
Note 2: The values for constant1, constant2 and constant3 can be found in the code snippet FindPOI.cpp | |||
[[File:FindPOIV2.png|center|thumb|650px|Image: 650 pixels|Figure 4: Flowchart: find POI.]] | |||
== POI following algorithm (one person on the field) == | |||
The next step, after that POI is found, POI has to be followed by PICO. During the test session, first a following algorithm which is able to follow one person in the field is tested. This person is POI. This test verifies the cluster detection algorithm as explained above. | |||
In the initial phase is init = 0, PICO rotate to POI setpoint. In the flowing part is init = 1, PICO drive then to setpoint. | |||
<math>\text{rotate speed} = angle \div scale</math> where angle is the angle from PICO to POI. | |||
The flowchart Follow POI is shown in Figure 5. Note 2: The values for the scaling and the max.distance can be found in the code snippet Motion.cpp | |||
<div><ul> | |||
<li style="display: inline-block;"> [[File:Follow_me.gif|size=small|thumb|400px|Image: 400 pixels|Follow POI]] </li> | |||
<li style="display: inline-block;"> [[File:MotionV3.png|size=small|thumb|550px|Image: 550 pixels|Figure 5: Flowchart: Follow POI.]] </li> | |||
</ul></div> | |||
== POI following algorithm (with other persons on the field) == | |||
The following algorithm that is used to follow POI with other persons on the field is 'Nearest neighbor' algorithm. | |||
The idea is to compare the distance between previous setpoint of the POI and the new measured clusters (new laser scan). The cluster that has the smallest distance between previous POI setpoint is considered as the POI. The formula is the 2-norm, the distance between previous setpoint (pos_xPOI and pos_yPOI) and the current clusters middle points, is shown in the equation below. The flowchart find new POI setpoint is shown in figure 6. | |||
<math>\text{distance}[j] =\sqrt{(pos_xPOI-pos_x[j])^2-(pos_yPOI-pos_y[j])^2} \text{ where, j is the number of the current cluster.} </math> | |||
<math> \text{index} = \text{argmin}(\text{distance}[j]) </math> | |||
<math> \text{POI} = \text{cluster}[index]</math> | |||
where cluster consists of pos_x[index], pos_y[index]. | |||
[[file:Find_new_POI_setpointV5.png|center|thumb|550px|Image: 550 pixels|Figure 6: Flowchart: find new POI setpoint.]] | |||
= Film of the final result = | |||
Till 0:50 one person on the field and after 0:50 there are more persons on the field. | |||
== | [[File:Follow_ME.png|center|700px|link=https://www.youtube.com/watch?v=LboPEaFtdWI&list=PLdrhMTeTu9S95tl1XVE4jkwHLUe2tX6IW]] | ||
= Conclusions and recommendations = | = Conclusions and recommendations = | ||
==Conclusions== | |||
The conclusion is that if the robot can make correct cluster of each person/object/wall then POI can always be found. The 'nearest neighbor' allows PICO to follow POI even with more moving persons. | |||
==Recommendations== | |||
The 'nearest neighbor' takes now only the latest POI setpoint. If this POI setpoint is not correct then the PICO will follows the wrong person or drives to an object or wall. This can be solved by not taking only the latest POI setpoint, but for example take the last 5 POI setpoints and if there is a POI setpoint with too much deviation, it should not be included. | |||
Other recommendations is to solve level 2 and level 3! | |||
Latest revision as of 18:03, 19 August 2018
This wiki describes and explains the software that was made for and implemented on the PICO robot to complete the retake of Embedded Motion Control course 2017-2018. The mission of the retake EMC 2018 is describe in the subsection ‘The challenge ‘Follow me!’’.
The robot that is used during the project is PICO. PICO has a holonomic wheelbase with which it can drive, a Laser Range Finder (LRF) from which it can gather information about the environment (blocked/free space) and wheels that are equipped with encoders to provide odometry data. All software that is developed has to be tested on the robot. There is also a simulator available which provides an exact copy of PICO’s functionalities. PICO itself has an on-board computer running Ubuntu 16.04. The programming language that is used during the course and the retake is C++ and Gitlab is used to store the code.
Student
| TU/e Number | Name | |
|---|---|---|
| 1037038 | Daniël (D.J.M.) Bos | D.J.M.Bos@student.tue.nl |
The challenge ‘Follow me!’
The main goal is to follow the Person Of Interest (POI) in a cluttered environment. The person closest to PICO is the POI at standstill. The POI will walk a pre-defined route that’s unknown to the PICO. There are targets strip which the POI will cross in the middle. To prove whether PICO is able to follow the POI correctly, PICO should also cross these target strips. A overview of the setup is shown on Figure 1.
The are also other actors present in the area of interest. These actors will similarly as the POI start at standstill. The other actors will also walk around when PICO has started his following-algorithm. The only restriction that the actors have is that they can never occlude the POI, i.e., they can not walk in between PICO and the POI. Figure 2 depicts a situation which can not occur.
-
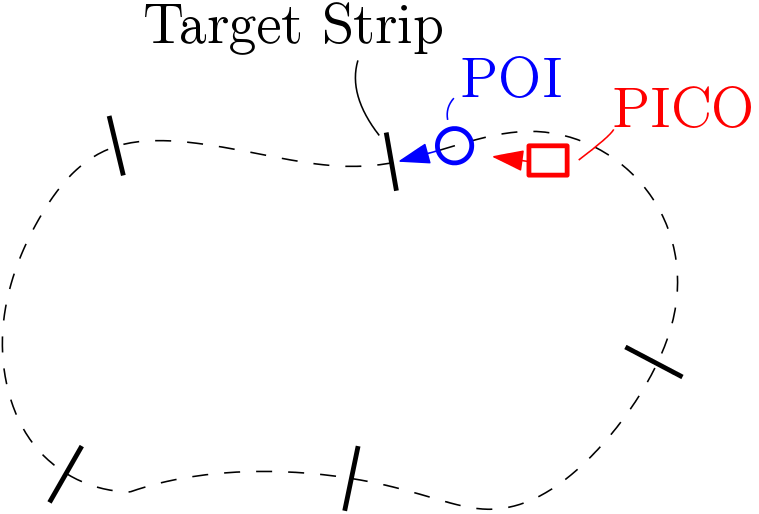
Figure 2: A situation which can not occur for Level 1. In red we see PICO, blue the POI, and in darkgreen the actor. -

Figure 2: A situation which can not occur for Level 1. In red we see PICO, blue the POI, and in darkgreen the actor.


Initial Design
Introduction:
For the initial design, the requirements will be discussed as well as the functions and their specifications. Moreover, a list of the used hardware components and the diagram of the interface are shown below.
Requirements:
- Execute all tasks autonomously.
- The POI will start initially close to and is detectable at standstill.
- Finish the challenges within 2 minutes.
- The POI will move in such manner that, in most cases, two legs are visible.
- The POI will pass trough the middle of the target strips.
- The PICO must cross 80% of the target strips.
- The PICO must follow the POI at a distance of approximately 0.4 [m].
- Perform all tasks without bumping with a person.
- Perform all tasks without getting stuck in a loop.
Specifications:
The specifications are based on the requirements.
For the POI:
- The maximum velocity is 0.5 [m/s].
For the PICO:
- The maximal transitional velocity in any direction is 0.5 [m/s].
- The maximal rotational velocity is limited to 1.2 [rad/s]
- PICO should not stand still or make no sensible movements for periods over 30 [seconds].
- The PICO must follow the POI at maximum distance of 0.4±0.2 [m].
- Finish the challenge within 2 [min.].
The targets strips:
- The width of targets strips are each 1 [m].
- The number of target strips is around 5.
Functions:
The functions that are going to be implemented are subdivided into three different types of functionality. The types are low level, middle level and high level.
- Low level: referred to as the motion functions, these functions will be used to interact directly with the robot.
- Middle level: a more abstract level, belongs to the skill functions and they perform specifics actions.
- High level: most abstract level, they are in the task functions. The task functions are structured to carry out a specific task, which consists of multiple actions.
So, in a task function, a specific order of actions will be specified in order to be able to fulfill the task. The actions that the robot can perform, and are therefore available to be called by the task functions, are specified in the skill functions. The motion functions are used in the skill functions to be able to invoke physical behavior by the robot.
Motion functions:
- Actuation: Using the actuation function PICO is given the command to drive in a specific direction or to turn in a specific direction. The input to this function is a movement vector which specifies in which direction and how far the robot should move. The output is actual robot movement according to this vector and the control effort needed for this movement.
- Obtain information: Using the obtain information function sensor readings can be requested. The input for this function is the request of a (sub)set of sensor data from a specific sensor(set), either the Laser Range Finder (LRF) or the odometry encoders.
Skill functions:
- Threshold filters: Find clusters, look at the difference angle and/or radius between the laser points, see Section 4.1.
- Find POI: Find the nearest person in the initial face, see Section 4.1.
- Middle points calculations: Calculate the average position of each cluster, see Section 4.1.
- Nearest Neighbor: Find new POI setpoint, see Section 4.3.
Task functions:
- Initial find POI: Find the nearest person in the initial face, see Section 4.1.
- Follow algorithm: with the world model, skill functions and motion functions can this achieved.
Components:
To be able to execute the 'Follow me!' challenges the PICO robot, already mentioned above, will be used. The following hardware components will be utilized:
Actuators: holonomic base with three omni-wheels.
Sensors:
- Laser range finder (LRF): To detect the distances to objects in the environment.
- Range: To be determined.
- Field of view: 270 degrees.
- Accuracy: To be determined.
Computer: running Ubuntu 16.04.
The interface:
The interfaces describe the data that is communicated between the several parts of code. The functions that are discussed in the Chapter Functions are all part of the interface. In the interface there is also a world model. The world model will contain the most recent POI setpoint and the LFR data.The motion, skill and task functions can monitor and request the information that is stored in this world model and use it to properly execute their function. The interface is shown in Figure 3.

Software explanation
The software is subdivided in two main parts, Find POI, POI following algorithm (on person on the field) and POI following algorithm (with other persons on the field) . They are described in the Subsections below.
Code snippets
Find POI
First PICO has to find POI. The structure of the software of these classes is shown in Figure 4. With the LRF data is it possible to find something, i.e, a person, a objects, a wall or disturbance. The LRF data is split into clusters. A cluster is a series of laser points, which are connected to each other. Afterwards it must be determined whether the cluster is, the POI, a person/object/wall or disturbance.
Clusters can be found with threshold filters for the angle and radius between laser points. If the angle between laser points are larger than constant1 or/and the distance between laser points are larger then constant2 then a new cluster is found. If a cluster is larger than constant3 then a person, object or wall is found otherwise it is disturbance. A single cluster contains of a "middle point" which has an x and y coordinate and count of the number of laser points in the cluster:
[math]\displaystyle{ pos_x = sum_x/count }[/math]
[math]\displaystyle{ pos_y = sum_y/count }[/math]
where sum_x and sum_y are the summation of all the x/y coordinates of the laser points in the current cluster. These clusters are then converted to actual setpoints, the cluster of the person that has the smallest distance between the previous setpoint and PICO is the POI. This will be explained in further detail in POI following algorithm (with other persons on the field).
Note 1: At the start there is a person nearest PICO not something else. Note 2: The values for constant1, constant2 and constant3 can be found in the code snippet FindPOI.cpp

POI following algorithm (one person on the field)
The next step, after that POI is found, POI has to be followed by PICO. During the test session, first a following algorithm which is able to follow one person in the field is tested. This person is POI. This test verifies the cluster detection algorithm as explained above.
In the initial phase is init = 0, PICO rotate to POI setpoint. In the flowing part is init = 1, PICO drive then to setpoint.
[math]\displaystyle{ \text{rotate speed} = angle \div scale }[/math] where angle is the angle from PICO to POI.
The flowchart Follow POI is shown in Figure 5. Note 2: The values for the scaling and the max.distance can be found in the code snippet Motion.cpp
-
Follow POI -

Figure 5: Flowchart: Follow POI.


POI following algorithm (with other persons on the field)
The following algorithm that is used to follow POI with other persons on the field is 'Nearest neighbor' algorithm. The idea is to compare the distance between previous setpoint of the POI and the new measured clusters (new laser scan). The cluster that has the smallest distance between previous POI setpoint is considered as the POI. The formula is the 2-norm, the distance between previous setpoint (pos_xPOI and pos_yPOI) and the current clusters middle points, is shown in the equation below. The flowchart find new POI setpoint is shown in figure 6.
[math]\displaystyle{ \text{distance}[j] =\sqrt{(pos_xPOI-pos_x[j])^2-(pos_yPOI-pos_y[j])^2} \text{ where, j is the number of the current cluster.} }[/math]
[math]\displaystyle{ \text{index} = \text{argmin}(\text{distance}[j]) }[/math]
[math]\displaystyle{ \text{POI} = \text{cluster}[index] }[/math]
where cluster consists of pos_x[index], pos_y[index].

Film of the final result
Till 0:50 one person on the field and after 0:50 there are more persons on the field.

Conclusions and recommendations
Conclusions
The conclusion is that if the robot can make correct cluster of each person/object/wall then POI can always be found. The 'nearest neighbor' allows PICO to follow POI even with more moving persons.
Recommendations
The 'nearest neighbor' takes now only the latest POI setpoint. If this POI setpoint is not correct then the PICO will follows the wrong person or drives to an object or wall. This can be solved by not taking only the latest POI setpoint, but for example take the last 5 POI setpoints and if there is a POI setpoint with too much deviation, it should not be included.
Other recommendations is to solve level 2 and level 3!