Designing the Opening Component: Difference between revisions
| (55 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
Click to go to [[Opening]]. | Click to go to back to [[Opening]]. | ||
<br> | <br> | ||
<br>There are many aspects that need to be considered when developing the mechanical system. | <br>There are many aspects that need to be considered when developing the mechanical system. | ||
| Line 11: | Line 11: | ||
! width="75%" | Stage | ! width="75%" | Stage | ||
|- valign="top" | |- valign="top" | ||
| | | | style="background-color:#20ff74;" | | ||
| scope="row" | 29-Sept | | scope="row" | 29-Sept | ||
| Answered all Research Questions | | Answered all Research Questions | ||
|- valign="top" | |- valign="top" | ||
| | | | style="background-color:#20ff74;" | | ||
| scope="row" | 29-Sept | | scope="row" | 29-Sept | ||
| List of Requirements the opening should fulfill | | List of Requirements the opening should fulfill | ||
|- valign="top" | |- valign="top" | ||
| | | style="background-color:#20ff74;" | | ||
| scope="row" | 29-Sept | | scope="row" | 29-Sept | ||
| Set Specifications/Facts for tote & speed | | Set Specifications/Facts for tote & speed | ||
|- valign="top" | |- valign="top" | ||
| | | style="background-color:#20ff74;" | | ||
| scope="row" | 1-Oct | | scope="row" | 1-Oct | ||
| Mechanisms and Design Decisions Done to get to final concept | | Mechanisms and Design Decisions Done to get to final concept | ||
|- valign="top" | |- valign="top" | ||
| | | style="background-color:#20ff74;" | | ||
| scope="row" | 6-Oct | | scope="row" | 6-Oct | ||
| Detailed Sketch(es) of Opening | | Detailed Sketch(es) of Opening | ||
|- valign="top" | |- valign="top" | ||
| | | style="background-color:#20ff74;" | | ||
| scope="row" | 6-Oct | | scope="row" | 6-Oct | ||
| Description of how it works & how to build | | Description of how it works & how to build | ||
|} | |} | ||
= Facts = | = Facts = | ||
| Line 50: | Line 46: | ||
! width="20%" | Depth | ! width="20%" | Depth | ||
! width="20%" | Weight | ! width="20%" | Weight | ||
|- valign="top" | |- valign="top" | ||
| Average | | Average | ||
| | | 12 cm | ||
| | | 15 cm | ||
| | | 26 cm | ||
| | | 1.5 kg <sub>''max 2.3 kg''</sub> | ||
|} | |} | ||
<sub>Specs were estimated from looking at the Amazon Prime Air video since no real dimensions could be found, currently.</sub><ref>Allain, R.(2013).Physics of the Amazon Octocopter Drone.Wired Science Blogs.<http://www.wired.com/2013/12/physics-of-the-amazon-prime-air-drone/></ref><br> | |||
<br> | <br> | ||
Tote has barcode located in bottom right corner of the tote on both the front and back face, simplifies orientation problem. | |||
<br> | <br> | ||
<br> | <br> | ||
Totes expected to be handled p/day: 20 max | |||
<br> | <br> | ||
Time Spent handling a tote: 1 minute | |||
= Problem Description = | = Problem Description = | ||
| Line 123: | Line 107: | ||
'''Assumptions:''' | '''Assumptions:''' | ||
* Drone has Obstacle Detection to avoid objects in its way | * Drone has Obstacle Detection to avoid objects in its way | ||
= Research Questions = | |||
== Identification == | |||
'''Question: What kind of identification methods are there and how do they work? | |||
* Radio Frequency ID (RFID)<ref>Wikipedia. (2014). Radio-frequency identification. <http://en.wikipedia.org/wiki/Radio-frequency_identification></ref> - makes use of wireless electromagnetic fields to transfer data. It allocates tracking and identification of tags which are attached to items. This has been used in many different areas: Access Control for Hotel Rooms, Transportation and logistics in a distribution center, Track and trace of package deliveries. | |||
** How it works: To make use of this identification methods it consists of two parts: a Tag and a Reader. The tag has the identification which can be transmitted. The reader sends a signal to the tag & then reads its response. The type of RFID system that is used is dependent on the tags and readers chosen to use. | |||
** Used in Real Life: Drone Tracks Steel Products in Storage Yard <ref>Swedberg, C.(2014, 26 Sept). RFID-Reading Drone Tracks Structural Steel Products in Storage Yard. RFID Journal. <http://www.rfidjournal.com/articles/view?12209></ref> The drone is equipped with an RFID reader and steal bundles have the tags. Daily this drone hovers over various areas, reads tags and couples its own GPS location to this information and feeds it to a PC where the company keeps track of inventory. | |||
***This could possibly be used on the platform design to get the package identified and then couple a cubby number to the package as it further proceeds through the system. | |||
**RFID Systems can: Keep count of stock through capturing all tags in a given areas & comparing them to a previous inventory position<ref>Waer Systems.(2014). RFID Asset Track & management System. Waer Systems Limited.<http://www.waersystems.com/rfid.html?gclid=CjwKEAjwhqShBRDS95LciqqaonISJADj1rga7qK8f-0pshuxN_Y90T1yieFTxy_JHOIqdiBpTyG0aRoCH2Hw_wcB></ref> | |||
***This could solve keeping track of empty and full cubbies as well. | |||
** Also good to note that RFID tags can be rewritten/relabeled after use <ref>Roberti, M. (2014, 26 Feb). How Can I Program a Rewritable RFID Tag?. RFID Journal. <http://www.rfidjournal.com/blogs/experts/entry?10929></ref> | |||
(See [http://en.wikipedia.org/wiki/Radio-frequency_identification | RFID Wiki] for more information) | |||
<br> | |||
* Barcode Scanning <ref>Wikipedia.(2014).Barcode reader.<http://en.wikipedia.org/wiki/Barcode_reader></ref> - makes use of a barcode and scanning devices that reads the barcodes. Barcodes are read via a light sensor which translates "optical impulses" into electrical ones, which decodes into the barcode's contents. Kinds of bar-code scanner that may be appropriate for our system. | |||
** Omni-Directional Fixed Position Scanner - Can read poorly printed, wrinkled, or even torn barcodes. Often used in logistics to identify trays or pallets that need distribution to specific locations, or used in supermarkets. This type of scanner can be oriented in a position to read the barcodes off the package. | |||
**Looking at possible barcode scanners that can be bought and their specifications I stumbled up Leuze Electronic. There I found a vast array of barcode scanners and detail in how they could be used. A Single Scanner, just 1 positioned however we want, could scan at high rates (industrial) but could only read a barcode from a specific orientation. A MPSi System, however, allowed the barcode to be read from any orientation. This was done by use for 2-3 scanners located in various positions. The cost of this kind of system, was definitely more pricey. Also to be noted is that each of these scanners require external power sources, or otherwise batteries that need replacement often. <ref>N.A.(2014).Barcodeleser.Leuze Electronic GmbH.<http://www.leuze.com/en/deutschland/produkte/identifikation/barcode_identifikation/stationaere_barcodeleser/index.php></ref> | |||
** Furthermore, there are various types of barcodes<ref>Wikipedia.(2014).Barcode.<http://en.wikipedia.org/wiki/Barcode#Types_of_barcodes></ref>: QR code, Universal Product Codes etc. Any of these would be appropriate for our system.<br> | |||
(See [http://en.wikipedia.org/wiki/Barcode_reader | Barcode Reader] wiki for more information.) | |||
<br> | |||
<br> | |||
'''''What this research contributes to the design of this component:''''' | |||
<br> From the research above, the RFID would be the better solution for the system: | |||
# because it allows identification to be a continual process instead of requiring check points for scanning | |||
# because it allows for re-writable totes, instead of having to sticker on a new barcode for every package | |||
# because it creates more DoF in package orientation because a single receiver can located somewhere in the system, rather than placement of a scanner where the package has to pass by in the appropriate orientation | |||
*Minor Considerations for the RFID: Security of the RFID/Interference with the RFID System | |||
== Orientation / Location Finding == | |||
'''Question: What kind of orientation methods are there to position robots/carts/etc. and how do they work?''' | |||
* Parking Sensors<ref>Wikipedia.(2014).Parking Sensors.<http://en.wikipedia.org/wiki/Parking_sensors></ref> - signal the driver when he/she is getting close to an obstacle. | |||
** How it Works: Sensors send out acoustic pulses, with a control unit measuring the return interval of each reflected signal and calculating object distances <ref>N.A.(2008).Mercedes Benz Parktronic system (PTS). Launch Tech. <http://www.micro-tronik.com/Support/Info/Benz-PTS.htm></ref> | |||
** Real Life Scenario: Automatic Parking Systems - Sensors installed on the bumpers act as transmitters and a receivers. These sensors send a signal that will be reflected back when it encounters an obstacle near the vehicle. Then, the returning time signals are used to determine the position of obstacles. The car will detect the parking space size and distance from the roadside, then drive the car into the parking space. [https://www.youtube.com/watch?v=iXmwEmO96Wk| Volvo Autonomous Parking Video] | |||
<br> | |||
* Wireless Call & Receiver Units (PatentUS7636621) - Makes use of a directional wireless reception unit on a device. It can receive a radio wave guidance from a call unit and then move toward the unit on basis of intensity and direction of the signal. <ref>Industrial Technology Research Institute-Taiwan. (2009). Path Guidance method for autonomous mobile device. <http://www.google.com/patents/US7636621></ref> | |||
<br> | |||
* Visual Tracking<ref>Papanikolopoulos, N., Khosla, P. K., & Kanade, T. (1991, June). Adaptive robotic visual tracking. In American Control Conference, 1991 (pp. 962-967). IEEE.</ref> - Through use of a tracking sensor and a target (symbol or object that device is set to detect) a system can align itself appropriately with the target. There are some difficulties with the feedback loop that should be addressed. | |||
** How it Works: Alignment through rotation is completed by calculating what angle the device needs to turn in order to align with the target. A visual image sent to the system can allow calculation for the answer of degrees needed to move & a gyro could assist in sensor feedback to know how far the device has turned already. Distance measurement and alignment through x-y movement is can be done by programming a set distance one can move and comparing it to the status of the location of the target.<ref>N.A. (2013).Visual Tracking. RoboRealm.<http://www.roborealm.com/tutorial/FIRST/slide030.php> </ref> | |||
<br> | |||
'''''What this research contributes to the design of this component: ''''' | |||
<br> | |||
From the research above it can be noted that there are means to get the drone to the landing platform as well as make it possible to align a certain way before dropping off the package. The Wireless Call & Receiver Units would be a good use of making the drone find the landing platform because the call unit signals can be sent when the drone is detected in proximity. Also the visual tracking could be used to align the drone in a certain direction on the platform. (If that is really necessary is dependent on the identification method used.) The complications with the visual tracking, however, could be that the alignment target may be covered by something which prevents detection. So solutions would have to be addressed for that. | |||
== Birds & Environmental Factors == | |||
'''Question: What are possible ways to keep birds off a platform?''' | |||
<br>To keep birds away, one can use visual deterrents, audio, scents etc. (Installing fake owls, spray designated areas with certain scents etc.) The issues are if birds can detect the owl is fake, they will come back and certain scents need to be reapplied regularly. Moving objects do well in keeping birds out of vicinities. <ref>Zemsky, M.(2013).Deterring Birds. About Home. http://gardening.about.com/od/gardenproblems/a/Deterring_Birds.htm</ref> | |||
<br> | |||
'''Question: What are some simple solutions to prevent snow/rain accumulation on a raised platform?''' | |||
* Have a grated platform allows drainage capabilities. <ref>N.A.(2010).DIAMONDBACK® Deckplate Planks.McNichols.<http://www.mcnichols.com/products/grating/plank/serrated-vented-surface/></ref> | |||
* Have a slanted platform allows the snow and rain to slide away due to gravity <ref>Crawford, N.(2011).The Pros & Cons of Flat vs. Pitched Roofing.Hearst Communications Inc.<http://homeguides.sfgate.com/pros-cons-flat-vs-pitched-roofing-6931.html></ref> | |||
* Spraying with Snow/Ice Repellent <ref>N.A. (2011) Blog: How or What can i use to keep the snow off my direct tv sat dish?. DBSTalk. <http://www.dbstalk.com/topic/188869-how-or-what-can-i-use-to-keep-the-snow-off-my-direct-tv-sat-dish/></ref> | |||
<br> | |||
'''''What this research contributes to the design of this component: ''''' | |||
<br> | |||
To address the environmental factors for our system, it is good to know that spraying with snow/ice repellent is quite effective in the winters. Although this will cause a hassle to get maintenance on the roof, it will make sure the system continues to function properly. Also to address the birds, if we have moving parts on our system, we already have a deterrent for the birds. Other means of repelling become less effective over time or have to be continually maintained. | |||
<br> | |||
<br> | |||
<br> | |||
Click to go to back to [[Opening]]. | |||
= Ideas = | = Ideas = | ||
| Line 131: | Line 177: | ||
File:Group1-KS-Opening-Page6.jpg|KS-OpeningP6-27-09 <br> Funnel & Door Ideas | File:Group1-KS-Opening-Page6.jpg|KS-OpeningP6-27-09 <br> Funnel & Door Ideas | ||
</gallery> | </gallery> | ||
==Sloped Platform== | ==Drone Drop Zone== | ||
===Sloped Platform=== | |||
Labels: Drone Drop Zone | Labels: Drone Drop Zone | ||
<br> | <br> | ||
| Line 155: | Line 202: | ||
*See orientation mechanisms that could couple to align package | *See orientation mechanisms that could couple to align package | ||
==Flat Platform== | ===Flat Platform=== | ||
Labels: Drone Drop Zone | Labels: Drone Drop Zone | ||
<br>See '''page4''' in gallery above for sketch. | <br>See '''page4''' in gallery above for sketch. | ||
| Line 171: | Line 218: | ||
| Drone flight path slightly obstructed by wipers & guides | | Drone flight path slightly obstructed by wipers & guides | ||
|- valign="top" | |- valign="top" | ||
| | | Drone can be oriented, but is not necessarily required b/c system aligns package after drop | ||
| | | | ||
|} | |} | ||
| Line 177: | Line 224: | ||
*See orientation mechanisms that could couple to align package | *See orientation mechanisms that could couple to align package | ||
== | ===Conveyor=== | ||
Labels: Drone Drop Zone | |||
See '''page5''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 184: | Line 233: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | Similar to the other two platforms above. This idea has a large landing platform but has a continual moving conveyor located on one side. A wiper pushes the package onto the grated conveyor which leads the package to the chimney. | ||
| | | Continual movement of conveyor limits debris and snow accumulation | ||
| | | Maintenance very important | ||
|- valign="top" | |- valign="top" | ||
| | | | ||
| Possible noise issues? | |||
|} | |} | ||
*See door mechanisms that could couple to this component to bring package into the system | |||
*See orientation mechanisms that could couple to align package | |||
== | ===Funnel=== | ||
Labels: Drone Drop Zone | |||
<br>See '''page6''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 202: | Line 252: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | This is a large low gradient funnel. The drone drops the package off somewhere in the funnels area and the package then slides down to the chimney opening via gravity. | ||
| | | Mechanically Simple | ||
| Snow and other environmental factors also funnel to the chimney opening. | |||
| | |||
|- valign="top" | |- valign="top" | ||
| | | Drop area is large | ||
| | | Package may be too light to be affected by the gradient? | ||
|} | |} | ||
==Funnel== | * See door mechanisms that could couple to this component to bring package into the system | ||
Labels: Drone Drop Zone | * See orientation mechanisms that could couple to align package | ||
<br>See '''page6''' in gallery above for sketch. | |||
===Covered Funnel=== | |||
Labels: Drone Drop Zone with Door Mechanism | |||
<br> | |||
See '''page6''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 221: | Line 272: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | This is a large low gradient funnel. The drone signals to the system that it is approaching and the funnel's cover opens. Then the drone drops the package off somewhere in the funnels area and the package slides down to the chimney opening via gravity. | ||
| | | Addresses the environmental factors | ||
| | | Package may be too light for gradient | ||
|- valign="top" | |- valign="top" | ||
| | | Large area for dropping | ||
| Funneling package may create noise? | |||
| | |||
|} | |} | ||
== | * See door mechanisms that could couple to this component to bring package into the system | ||
Labels: | * See orientation mechanisms that could couple to align package | ||
<br> | |||
See ''' | ==Door Mechanisms== | ||
===Garage Door=== | |||
Labels: Door Mechanism | |||
<br>See '''page4''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 241: | Line 292: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | This is a scaled down version of the garage door/storage door we use in real life. It would cover the entry to the chimney and roll up on the side when signaled to open for a package. | ||
| | | Simple mechanism | ||
| | | Could be heavy ''or'' not durable | ||
|- valign="top" | |- valign="top" | ||
| | | Takes care of snow/rain that accumulates by rolling up and moving it away. | ||
| Could get caught up in itself when rolling up | |||
| | |||
|} | |} | ||
== | ===Double Doors=== | ||
Labels: Door Mechanism | Labels: Door Mechanism | ||
<br>See ''' | <br> | ||
See '''page6''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 261: | Line 310: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | One set flips up and outward to knock off any snow/debris and allow package inside. | ||
| | | Handles environmental factors | ||
| Doors flipping may hit something | |||
| | |||
|- valign="top" | |- valign="top" | ||
| | | | ||
| Malfunction could cause package to be flipped off the roof. | |||
|} | |} | ||
==Double | ===Double Flaps=== | ||
Labels: Door Mechanism | Labels: Door Mechanism | ||
<br> | <br> | ||
| Line 282: | Line 328: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | Hereby there are two sets up doors. 1 set flips up and outward to knock off any snow/debris and another set of doors that collapses inwards to allow the package through. These occur after each other to ensure nothing else gets into the system. | ||
| | | Extra precaution for bird/other external factors | ||
| | | Doors flipping to the inside take up space | ||
|- valign="top" | |- valign="top" | ||
| | | | ||
| | | Malfunction could cause package to be flipped off the roof. | ||
|- valign="top" | |- valign="top" | ||
| | | | ||
| Doors flipping out may hit something | |||
|} | |} | ||
==Folding Doors== | ===Folding Doors=== | ||
Labels: Door Mechanism | Labels: Door Mechanism | ||
<br>See '''page6''' in gallery above for sketch. | <br>See '''page6''' in gallery above for sketch. | ||
| Line 302: | Line 348: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | One set of doors that folds accordion style to the side which allows the package to proceed to the next stage. | ||
| | | Makes space the doors take up small when open. | ||
| Could allow environmental factors to fall inside. | |||
| | |||
|- valign="top" | |- valign="top" | ||
| | | | ||
| Mechanically more difficult | |||
|} | |} | ||
== | ==Orientation== | ||
Labels: | ===RF & Beacon=== | ||
<br> | Labels: Orientation | ||
See ''' | <br>See '''page5''' in gallery above for sketch. | ||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
| Line 323: | Line 366: | ||
! Cons | ! Cons | ||
|- valign="top" | |- valign="top" | ||
| rowspan="5" | | | rowspan="5" | This is a possible solution for orientation & identification of the package. Through a radio frequency a drone can signal to the delivery system that it is in range (or vice versa). Over this RFID information can be sent about the size and location of the drone drop zone so that the drone can find it. Once hovering over it, the drone can then align itself with a light beacon located at a point on the platform. | ||
| | | Can transfer information about the package over the RFID as well | ||
| | | Beacon can be blocked by environmental obstacles | ||
|- valign="top" | |||
| Allows specification of drone platform location and size of drone zone | |||
| Possible hacking? | |||
|} | |||
===Contrast Symbol=== | |||
Labels: Orientation | |||
<br>See '''page5''' in gallery above for sketch. | |||
{| border="1" class="wikitable" cellpadding="2" width="100%" | |||
|- valign="top" | |||
! width=50% |How it Works | |||
! Pros | |||
! Cons | |||
|- valign="top" | |- valign="top" | ||
| | | rowspan="5" | This is a possible solution for orientation & identification of the package. Through a symbol painted on the drone zone platform, the drone can perceive the contrast and orient itself accordingly to the symbol. | ||
| | | Simple Solution of painting a symbol | ||
| Paint can fade | |||
|- valign="top" | |- valign="top" | ||
| | | Allows specification of drone platform size on basis of symbol | ||
| | | Not a method to help find the platform | ||
|} | |} | ||
= Requirements = | = Requirements = | ||
{| border="1" class="wikitable" cellpadding="2" width="100%" | {| border="1" class="wikitable" cellpadding="2" width="100%" | ||
|- valign="top" | |- valign="top" | ||
! scope="row" width=" | ! scope="row" width="33%" | Functional | ||
! width=" | ! width="33%" | Process | ||
! width="33%" |External | |||
! width=" | |||
|- valign="top" | |- valign="top" | ||
| || || | | The component should be able to accept a package from a drone. || The component should be able to identify the package & designate a cubby location. || The delivery drones must be capable of moving to an exact location in x, y and z direction. | ||
|- valign="top" | |- valign="top" | ||
| || || | | The component should be able to get the package to the next phase of delivery. || The component should complete package retrieval within 30 seconds. || The delivery drones must have a Wifi Signal receiver to retrieve platform location information | ||
|- valign="top" | |- valign="top" | ||
| || || | | The component should have a way to handle debris & weather complications.|| The component should communicate with the delivery drone to provide location information. || The delivery drones should be able to calculate approach and positioning | ||
|- valign="top" | |- valign="top" | ||
| || | | The component should be able to report malfunction. || The component should know when a package is on the platform and is clear to proceed. || | | ||
|- valign="top" | |- valign="top" | ||
| || | | || || | | ||
|} | |} | ||
= Design Selection = | |||
Drop Zone - Flat with Wipers to maneuver package to chimney also grated to address some environmental factors | |||
<br>Door - Garage door system | |||
<br>Identification - RFID tags | |||
<br>Orientation - Radio signal & possibly visual tracking | |||
<br> | |||
<br> | |||
<br> | |||
Click to go to back to [[Opening]]. | |||
=References= | =References= | ||
<references /> | <references /> | ||
Latest revision as of 12:20, 19 October 2014
Click to go to back to Opening.
There are many aspects that need to be considered when developing the mechanical system.
Planning
| Completion | Due Date *a little flexible | Stage |
|---|---|---|
| 29-Sept | Answered all Research Questions | |
| 29-Sept | List of Requirements the opening should fulfill | |
| 29-Sept | Set Specifications/Facts for tote & speed | |
| 1-Oct | Mechanisms and Design Decisions Done to get to final concept | |
| 6-Oct | Detailed Sketch(es) of Opening | |
| 6-Oct | Description of how it works & how to build |
Facts

| Drone Tote | Height | Width | Depth | Weight |
|---|---|---|---|---|
| Average | 12 cm | 15 cm | 26 cm | 1.5 kg max 2.3 kg |
Specs were estimated from looking at the Amazon Prime Air video since no real dimensions could be found, currently.[1]
Tote has barcode located in bottom right corner of the tote on both the front and back face, simplifies orientation problem.
Totes expected to be handled p/day: 20 max
Time Spent handling a tote: 1 minute
Problem Description
Goal: The goal in this stage of the system is to receive a package from a drone, have it oriented in the appropriate position for further processing, and get it to the next stage of delivery.

| Environmental Factors | Dynamic Factors | Technical Factors |
|---|---|---|
| Rain | Birds | Waterproofing? |
| Snow | Bugs | Moisture Resistance? |
| Debris | Temp. affects on function? |
| Task/Function | Description |
|---|---|
| Positioning | Drone+/or Package reaches the correct place for dropping the package or entering the system |
| Identification | package+/or drone needs to be identified by the system so that it can further handle the package |
| Accuracy | drone landing/dropping of the package should be accurately placed in the landing zone |
| Speed | The rate at which a package should be handled to the next stage of the system |
| Size of Landing Zone | The size may effect accuracy of package dropping (want to make this as large as possible) |
| Flight Path Problem | How many DoF does the drone have to approach the opening? |
Assumptions:
- Drone has Obstacle Detection to avoid objects in its way
Research Questions
Identification
Question: What kind of identification methods are there and how do they work?
- Radio Frequency ID (RFID)[2] - makes use of wireless electromagnetic fields to transfer data. It allocates tracking and identification of tags which are attached to items. This has been used in many different areas: Access Control for Hotel Rooms, Transportation and logistics in a distribution center, Track and trace of package deliveries.
- How it works: To make use of this identification methods it consists of two parts: a Tag and a Reader. The tag has the identification which can be transmitted. The reader sends a signal to the tag & then reads its response. The type of RFID system that is used is dependent on the tags and readers chosen to use.
- Used in Real Life: Drone Tracks Steel Products in Storage Yard [3] The drone is equipped with an RFID reader and steal bundles have the tags. Daily this drone hovers over various areas, reads tags and couples its own GPS location to this information and feeds it to a PC where the company keeps track of inventory.
- This could possibly be used on the platform design to get the package identified and then couple a cubby number to the package as it further proceeds through the system.
- RFID Systems can: Keep count of stock through capturing all tags in a given areas & comparing them to a previous inventory position[4]
- This could solve keeping track of empty and full cubbies as well.
- Also good to note that RFID tags can be rewritten/relabeled after use [5]
(See | RFID Wiki for more information)
- Barcode Scanning [6] - makes use of a barcode and scanning devices that reads the barcodes. Barcodes are read via a light sensor which translates "optical impulses" into electrical ones, which decodes into the barcode's contents. Kinds of bar-code scanner that may be appropriate for our system.
- Omni-Directional Fixed Position Scanner - Can read poorly printed, wrinkled, or even torn barcodes. Often used in logistics to identify trays or pallets that need distribution to specific locations, or used in supermarkets. This type of scanner can be oriented in a position to read the barcodes off the package.
- Looking at possible barcode scanners that can be bought and their specifications I stumbled up Leuze Electronic. There I found a vast array of barcode scanners and detail in how they could be used. A Single Scanner, just 1 positioned however we want, could scan at high rates (industrial) but could only read a barcode from a specific orientation. A MPSi System, however, allowed the barcode to be read from any orientation. This was done by use for 2-3 scanners located in various positions. The cost of this kind of system, was definitely more pricey. Also to be noted is that each of these scanners require external power sources, or otherwise batteries that need replacement often. [7]
- Furthermore, there are various types of barcodes[8]: QR code, Universal Product Codes etc. Any of these would be appropriate for our system.
(See | Barcode Reader wiki for more information.)
What this research contributes to the design of this component:
From the research above, the RFID would be the better solution for the system:
- because it allows identification to be a continual process instead of requiring check points for scanning
- because it allows for re-writable totes, instead of having to sticker on a new barcode for every package
- because it creates more DoF in package orientation because a single receiver can located somewhere in the system, rather than placement of a scanner where the package has to pass by in the appropriate orientation
- Minor Considerations for the RFID: Security of the RFID/Interference with the RFID System
Orientation / Location Finding
Question: What kind of orientation methods are there to position robots/carts/etc. and how do they work?
- Parking Sensors[9] - signal the driver when he/she is getting close to an obstacle.
- How it Works: Sensors send out acoustic pulses, with a control unit measuring the return interval of each reflected signal and calculating object distances [10]
- Real Life Scenario: Automatic Parking Systems - Sensors installed on the bumpers act as transmitters and a receivers. These sensors send a signal that will be reflected back when it encounters an obstacle near the vehicle. Then, the returning time signals are used to determine the position of obstacles. The car will detect the parking space size and distance from the roadside, then drive the car into the parking space. Volvo Autonomous Parking Video
- Wireless Call & Receiver Units (PatentUS7636621) - Makes use of a directional wireless reception unit on a device. It can receive a radio wave guidance from a call unit and then move toward the unit on basis of intensity and direction of the signal. [11]
- Visual Tracking[12] - Through use of a tracking sensor and a target (symbol or object that device is set to detect) a system can align itself appropriately with the target. There are some difficulties with the feedback loop that should be addressed.
- How it Works: Alignment through rotation is completed by calculating what angle the device needs to turn in order to align with the target. A visual image sent to the system can allow calculation for the answer of degrees needed to move & a gyro could assist in sensor feedback to know how far the device has turned already. Distance measurement and alignment through x-y movement is can be done by programming a set distance one can move and comparing it to the status of the location of the target.[13]
What this research contributes to the design of this component:
From the research above it can be noted that there are means to get the drone to the landing platform as well as make it possible to align a certain way before dropping off the package. The Wireless Call & Receiver Units would be a good use of making the drone find the landing platform because the call unit signals can be sent when the drone is detected in proximity. Also the visual tracking could be used to align the drone in a certain direction on the platform. (If that is really necessary is dependent on the identification method used.) The complications with the visual tracking, however, could be that the alignment target may be covered by something which prevents detection. So solutions would have to be addressed for that.
Birds & Environmental Factors
Question: What are possible ways to keep birds off a platform?
To keep birds away, one can use visual deterrents, audio, scents etc. (Installing fake owls, spray designated areas with certain scents etc.) The issues are if birds can detect the owl is fake, they will come back and certain scents need to be reapplied regularly. Moving objects do well in keeping birds out of vicinities. [14]
Question: What are some simple solutions to prevent snow/rain accumulation on a raised platform?
- Have a grated platform allows drainage capabilities. [15]
- Have a slanted platform allows the snow and rain to slide away due to gravity [16]
- Spraying with Snow/Ice Repellent [17]
What this research contributes to the design of this component:
To address the environmental factors for our system, it is good to know that spraying with snow/ice repellent is quite effective in the winters. Although this will cause a hassle to get maintenance on the roof, it will make sure the system continues to function properly. Also to address the birds, if we have moving parts on our system, we already have a deterrent for the birds. Other means of repelling become less effective over time or have to be continually maintained.
Click to go to back to Opening.
Ideas
-
 KS-OpeningP3-27-09
KS-OpeningP3-27-09
Sloped Platform & Door Ideas -
 KS-OpeningP4-27-09
KS-OpeningP4-27-09
Flat Platform & Debris Ideas -
 KS-OpeningP5-27-09
KS-OpeningP5-27-09
Orientation Idea & Conveyor Idea -
 KS-OpeningP6-27-09
KS-OpeningP6-27-09
Funnel & Door Ideas




Drone Drop Zone
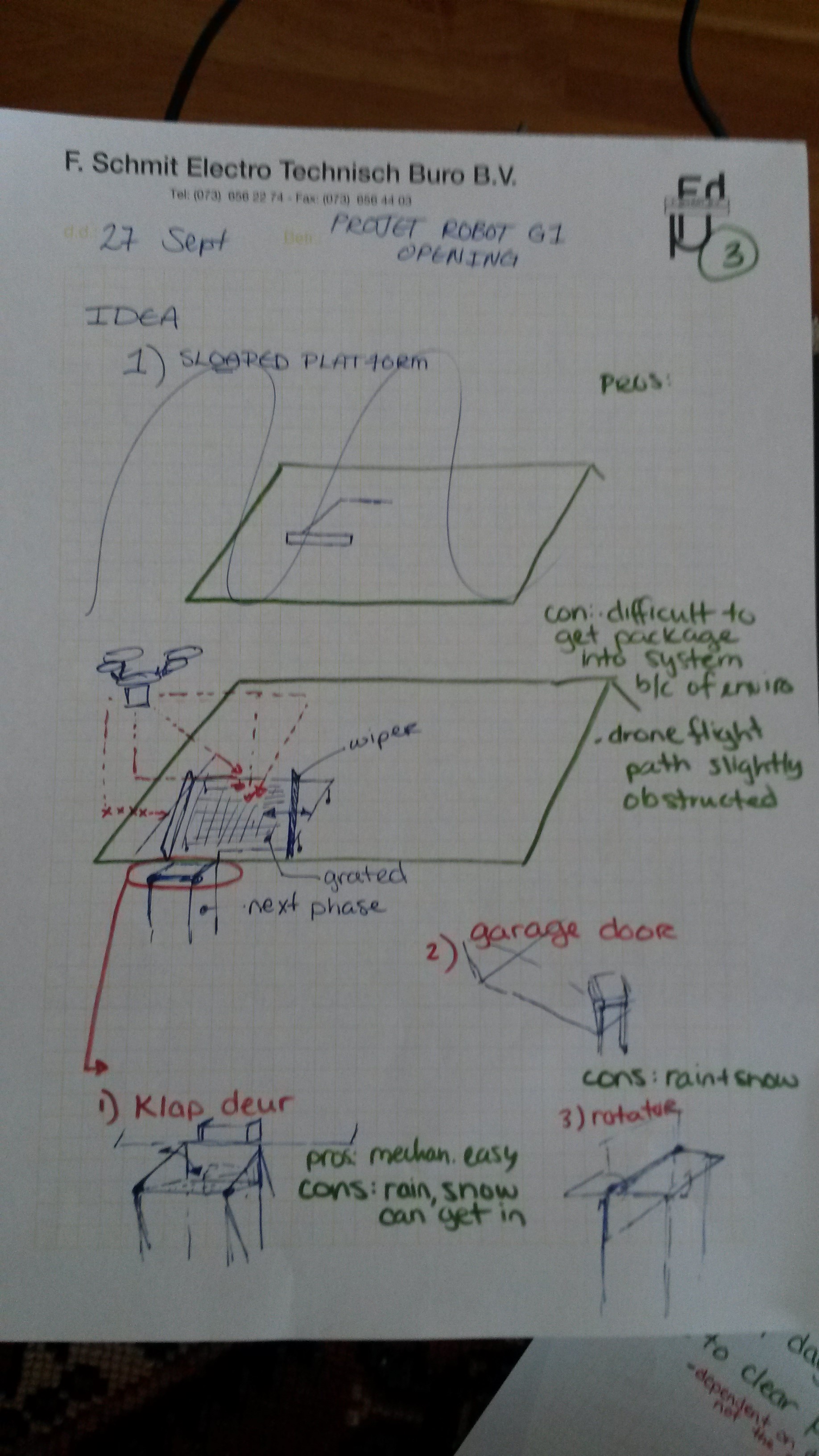
Sloped Platform
Labels: Drone Drop Zone
See page3 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| As the name suggests, this set-up has a platform that is sloped with alignment to the roof. The slope allows for the package to be dropped and travel down with gravity towards the opening of the chimney. Also this system has a wiper which pushes the package in alignment after dropping. To make sure the package does not fall off the platform, there are guides. | Wiper can be used to clean off debris & snow. | Drone flight path slightly obstructed due to wiper & guides |
| Allows wide land/drop zone for the drone. | May look odd on buildings with flat roofs | |
| Drone can be oriented, but is not necessarily required b/c system aligns package after drop |
- See door mechanisms that could couple to this component to bring package into the system
- See orientation mechanisms that could couple to align package
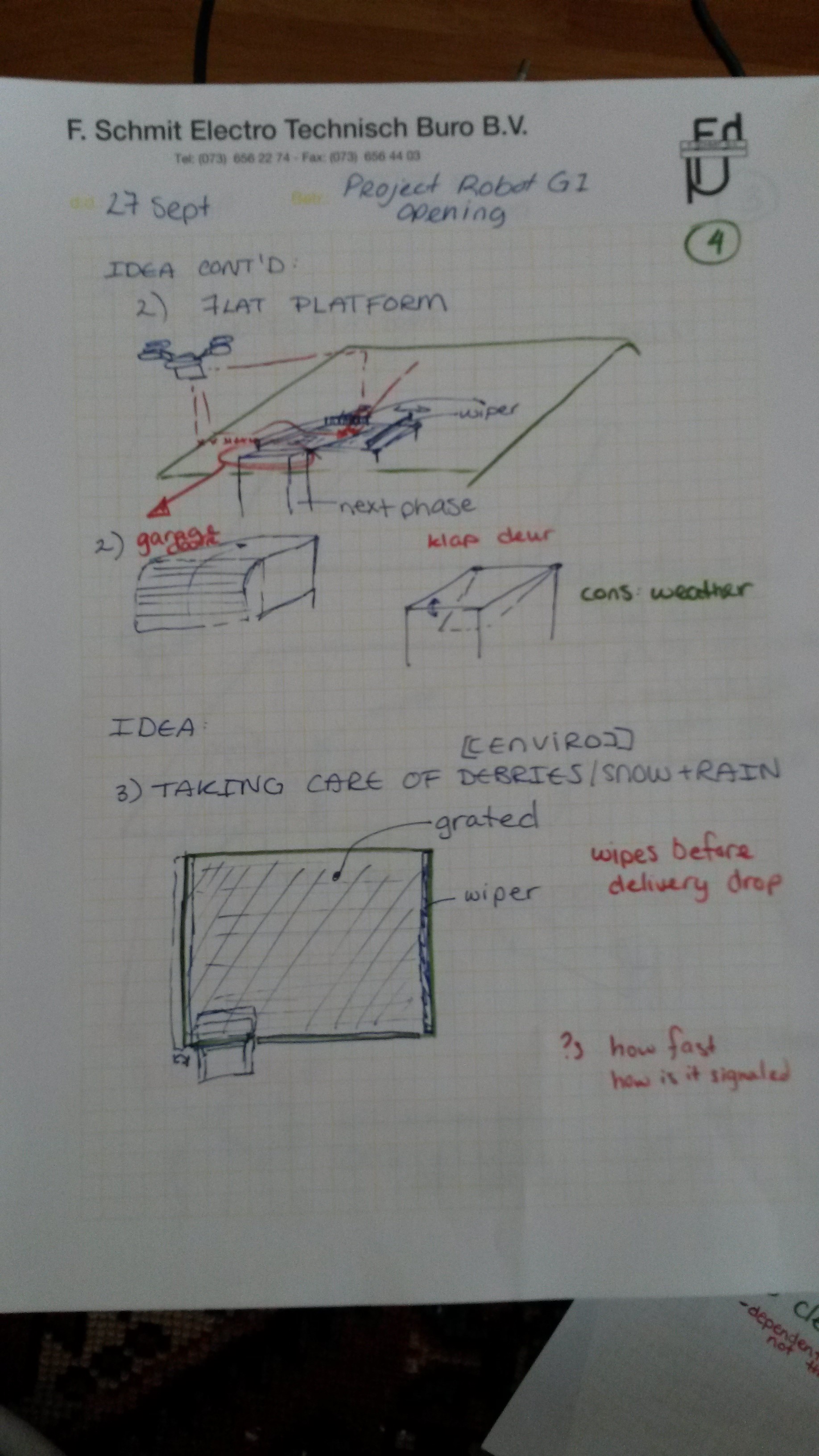
Flat Platform
Labels: Drone Drop Zone
See page4 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This set-up has a platform that is flat and makes the use of two wipers. One in the x direction and one in the y direction, which will be used t align the package accordingly with the opening of the chimney. Guides prevents the package from falling off the platform. | Gets package oriented and to location | Flat less effective than slanted |
| Allows for big area land/drop zone | Drone flight path slightly obstructed by wipers & guides | |
| Drone can be oriented, but is not necessarily required b/c system aligns package after drop |
- See door mechanisms that could couple to this component to bring package into the system
- See orientation mechanisms that could couple to align package
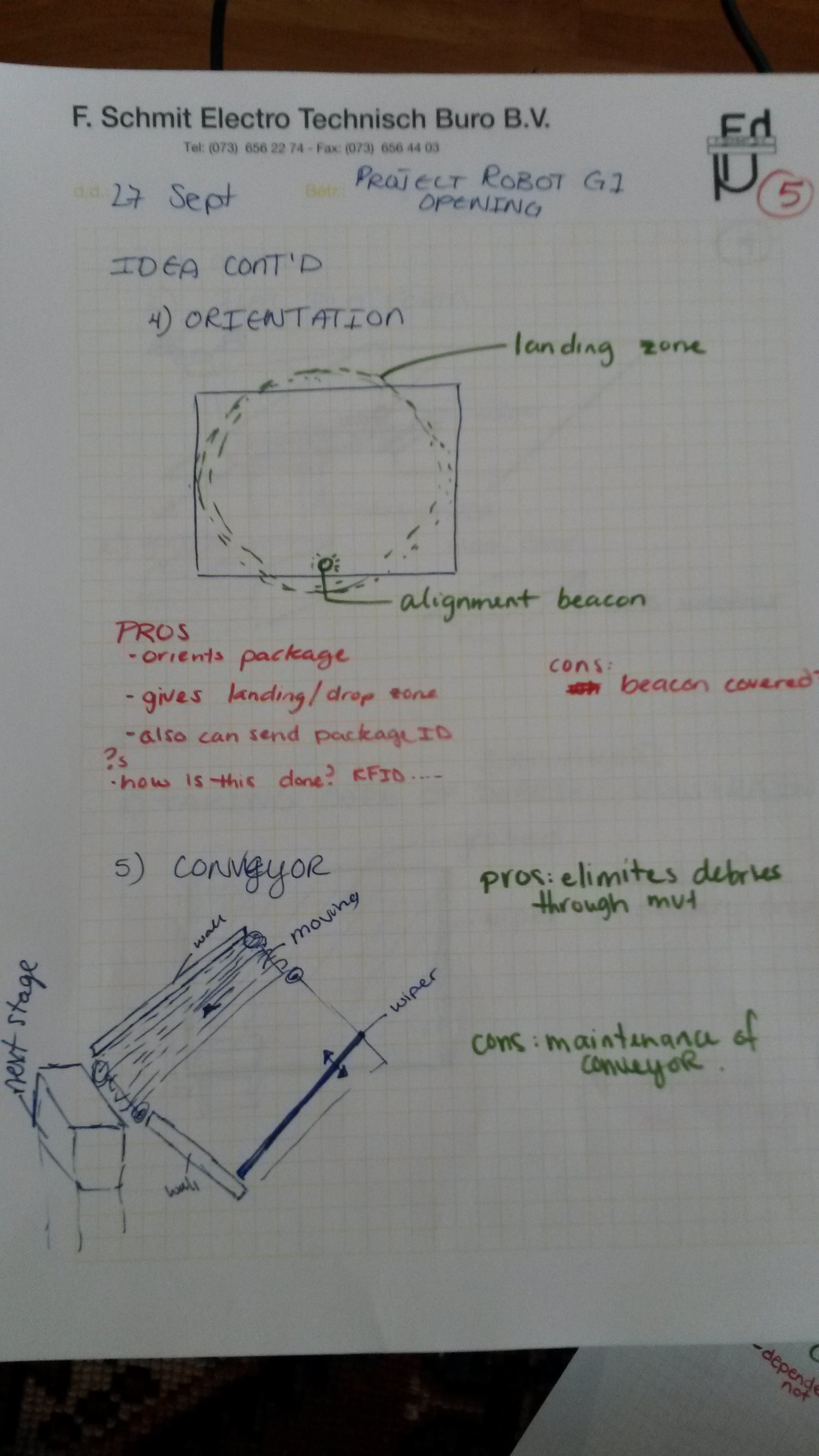
Conveyor
Labels: Drone Drop Zone See page5 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| Similar to the other two platforms above. This idea has a large landing platform but has a continual moving conveyor located on one side. A wiper pushes the package onto the grated conveyor which leads the package to the chimney. | Continual movement of conveyor limits debris and snow accumulation | Maintenance very important |
| Possible noise issues? |
- See door mechanisms that could couple to this component to bring package into the system
- See orientation mechanisms that could couple to align package
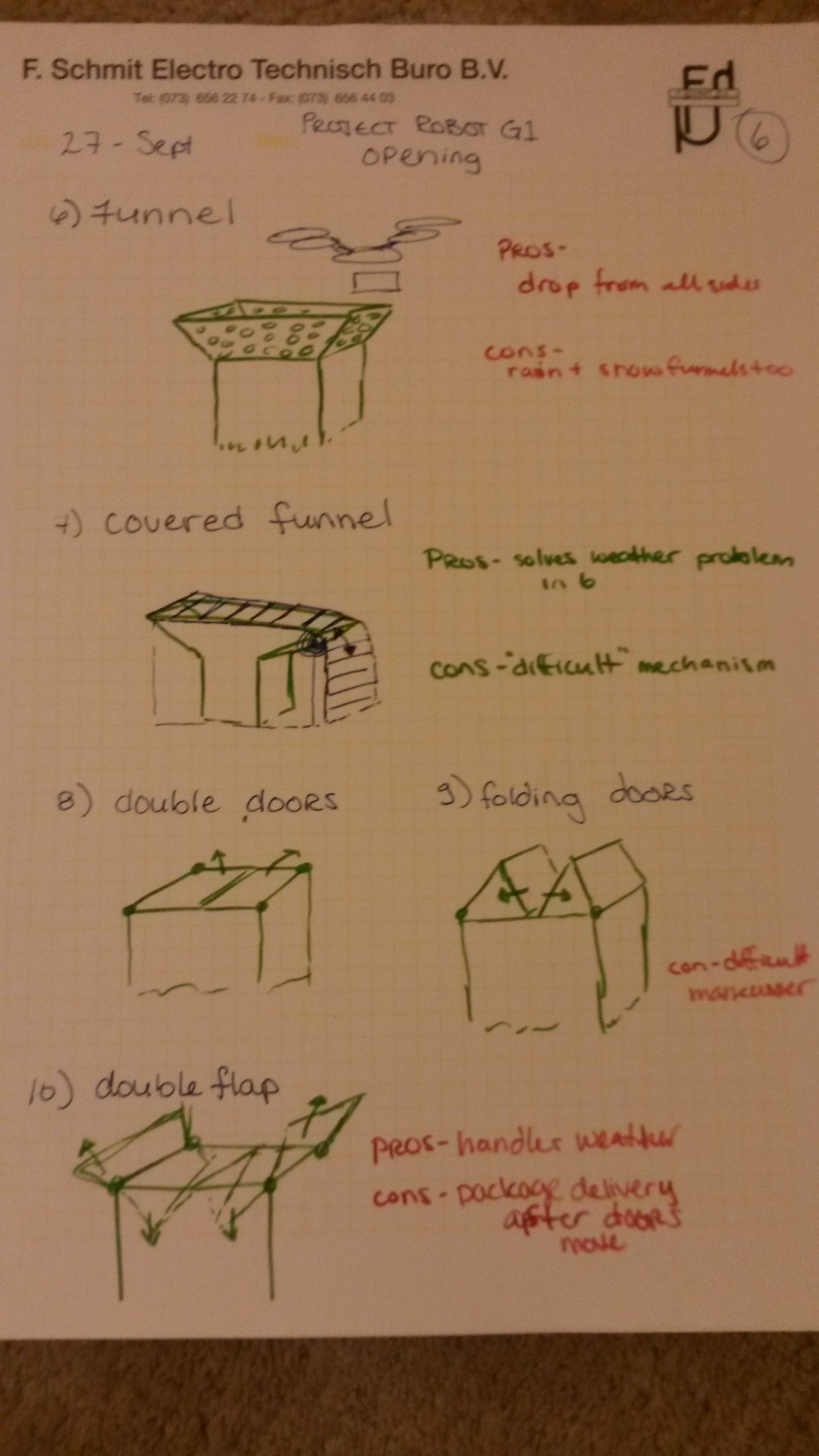
Funnel
Labels: Drone Drop Zone
See page6 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This is a large low gradient funnel. The drone drops the package off somewhere in the funnels area and the package then slides down to the chimney opening via gravity. | Mechanically Simple | Snow and other environmental factors also funnel to the chimney opening. |
| Drop area is large | Package may be too light to be affected by the gradient? |
- See door mechanisms that could couple to this component to bring package into the system
- See orientation mechanisms that could couple to align package
Covered Funnel
Labels: Drone Drop Zone with Door Mechanism
See page6 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This is a large low gradient funnel. The drone signals to the system that it is approaching and the funnel's cover opens. Then the drone drops the package off somewhere in the funnels area and the package slides down to the chimney opening via gravity. | Addresses the environmental factors | Package may be too light for gradient |
| Large area for dropping | Funneling package may create noise? |
- See door mechanisms that could couple to this component to bring package into the system
- See orientation mechanisms that could couple to align package
Door Mechanisms
Garage Door
Labels: Door Mechanism
See page4 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This is a scaled down version of the garage door/storage door we use in real life. It would cover the entry to the chimney and roll up on the side when signaled to open for a package. | Simple mechanism | Could be heavy or not durable |
| Takes care of snow/rain that accumulates by rolling up and moving it away. | Could get caught up in itself when rolling up |
Double Doors
Labels: Door Mechanism
See page6 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| One set flips up and outward to knock off any snow/debris and allow package inside. | Handles environmental factors | Doors flipping may hit something |
| Malfunction could cause package to be flipped off the roof. |
Double Flaps
Labels: Door Mechanism
See page6 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| Hereby there are two sets up doors. 1 set flips up and outward to knock off any snow/debris and another set of doors that collapses inwards to allow the package through. These occur after each other to ensure nothing else gets into the system. | Extra precaution for bird/other external factors | Doors flipping to the inside take up space |
| Malfunction could cause package to be flipped off the roof. | ||
| Doors flipping out may hit something |
Folding Doors
Labels: Door Mechanism
See page6 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| One set of doors that folds accordion style to the side which allows the package to proceed to the next stage. | Makes space the doors take up small when open. | Could allow environmental factors to fall inside. |
| Mechanically more difficult |
Orientation
RF & Beacon
Labels: Orientation
See page5 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This is a possible solution for orientation & identification of the package. Through a radio frequency a drone can signal to the delivery system that it is in range (or vice versa). Over this RFID information can be sent about the size and location of the drone drop zone so that the drone can find it. Once hovering over it, the drone can then align itself with a light beacon located at a point on the platform. | Can transfer information about the package over the RFID as well | Beacon can be blocked by environmental obstacles |
| Allows specification of drone platform location and size of drone zone | Possible hacking? |
Contrast Symbol
Labels: Orientation
See page5 in gallery above for sketch.
| How it Works | Pros | Cons |
|---|---|---|
| This is a possible solution for orientation & identification of the package. Through a symbol painted on the drone zone platform, the drone can perceive the contrast and orient itself accordingly to the symbol. | Simple Solution of painting a symbol | Paint can fade |
| Allows specification of drone platform size on basis of symbol | Not a method to help find the platform |
Requirements
| Functional | Process | External |
|---|---|---|
| The component should be able to accept a package from a drone. | The component should be able to identify the package & designate a cubby location. | The delivery drones must be capable of moving to an exact location in x, y and z direction. |
| The component should be able to get the package to the next phase of delivery. | The component should complete package retrieval within 30 seconds. | The delivery drones must have a Wifi Signal receiver to retrieve platform location information |
| The component should have a way to handle debris & weather complications. | The component should communicate with the delivery drone to provide location information. | The delivery drones should be able to calculate approach and positioning |
| The component should be able to report malfunction. | The component should know when a package is on the platform and is clear to proceed. | |
Design Selection
Drop Zone - Flat with Wipers to maneuver package to chimney also grated to address some environmental factors
Door - Garage door system
Identification - RFID tags
Orientation - Radio signal & possibly visual tracking
Click to go to back to Opening.
References
- ↑ Allain, R.(2013).Physics of the Amazon Octocopter Drone.Wired Science Blogs.<http://www.wired.com/2013/12/physics-of-the-amazon-prime-air-drone/>
- ↑ Wikipedia. (2014). Radio-frequency identification. <http://en.wikipedia.org/wiki/Radio-frequency_identification>
- ↑ Swedberg, C.(2014, 26 Sept). RFID-Reading Drone Tracks Structural Steel Products in Storage Yard. RFID Journal. <http://www.rfidjournal.com/articles/view?12209>
- ↑ Waer Systems.(2014). RFID Asset Track & management System. Waer Systems Limited.<http://www.waersystems.com/rfid.html?gclid=CjwKEAjwhqShBRDS95LciqqaonISJADj1rga7qK8f-0pshuxN_Y90T1yieFTxy_JHOIqdiBpTyG0aRoCH2Hw_wcB>
- ↑ Roberti, M. (2014, 26 Feb). How Can I Program a Rewritable RFID Tag?. RFID Journal. <http://www.rfidjournal.com/blogs/experts/entry?10929>
- ↑ Wikipedia.(2014).Barcode reader.<http://en.wikipedia.org/wiki/Barcode_reader>
- ↑ N.A.(2014).Barcodeleser.Leuze Electronic GmbH.<http://www.leuze.com/en/deutschland/produkte/identifikation/barcode_identifikation/stationaere_barcodeleser/index.php>
- ↑ Wikipedia.(2014).Barcode.<http://en.wikipedia.org/wiki/Barcode#Types_of_barcodes>
- ↑ Wikipedia.(2014).Parking Sensors.<http://en.wikipedia.org/wiki/Parking_sensors>
- ↑ N.A.(2008).Mercedes Benz Parktronic system (PTS). Launch Tech. <http://www.micro-tronik.com/Support/Info/Benz-PTS.htm>
- ↑ Industrial Technology Research Institute-Taiwan. (2009). Path Guidance method for autonomous mobile device. <http://www.google.com/patents/US7636621>
- ↑ Papanikolopoulos, N., Khosla, P. K., & Kanade, T. (1991, June). Adaptive robotic visual tracking. In American Control Conference, 1991 (pp. 962-967). IEEE.
- ↑ N.A. (2013).Visual Tracking. RoboRealm.<http://www.roborealm.com/tutorial/FIRST/slide030.php>
- ↑ Zemsky, M.(2013).Deterring Birds. About Home. http://gardening.about.com/od/gardenproblems/a/Deterring_Birds.htm
- ↑ N.A.(2010).DIAMONDBACK® Deckplate Planks.McNichols.<http://www.mcnichols.com/products/grating/plank/serrated-vented-surface/>
- ↑ Crawford, N.(2011).The Pros & Cons of Flat vs. Pitched Roofing.Hearst Communications Inc.<http://homeguides.sfgate.com/pros-cons-flat-vs-pitched-roofing-6931.html>
- ↑ N.A. (2011) Blog: How or What can i use to keep the snow off my direct tv sat dish?. DBSTalk. <http://www.dbstalk.com/topic/188869-how-or-what-can-i-use-to-keep-the-snow-off-my-direct-tv-sat-dish/>