PRE2016 4 Groep5: Difference between revisions
No edit summary |
|||
| (59 intermediate revisions by 5 users not shown) | |||
| Line 1: | Line 1: | ||
=Group 5: AED Drone from TU Delft= | =Group 5: AED Drone from TU Delft<ref name="TU Drone"> Momont, A., [http://resolver.tudelft.nl/uuid:36ce77ad-1b06-4149-8da4-a231dcdfec69 "Drones for Good"] (2014). TU Delft, Master of Science Integrated Product Design.</ref>= | ||
* 1. Thom Konijnenberg 0945007 t.j.c.konijnenberg (At) student.tue.nl | * 1. Thom Konijnenberg 0945007 t.j.c.konijnenberg (At) student.tue.nl | ||
* 2. Rense Nijenkamp 0960705 r.c.j.nijenkamp (At) student.tue.nl | * 2. Rense Nijenkamp 0960705 r.c.j.nijenkamp (At) student.tue.nl | ||
| Line 116: | Line 116: | ||
When plaque builds up in the arteries, the condition is called atherosclerosis. The buildup of plaque occurs over many years. | When plaque builds up in the arteries, the condition is called atherosclerosis. The buildup of plaque occurs over many years. | ||
Eventually, an area of plaque can rupture (break open) inside of an artery. This causes a blood clot to form on the plaque's surface. If the clot becomes large enough, it can mostly or completely block blood flow through a coronary artery. | Eventually, an area of plaque can rupture (break open) inside of an artery. This causes a blood clot to form on the plaque's surface. If the clot becomes large enough, it can mostly or completely block blood flow through a coronary artery. | ||
If the blockage isn't treated quickly, the portion of heart muscle fed by the artery begins to die. Healthy heart tissue is replaced with scar tissue. This heart damage may not be obvious, or it may cause severe or long-lasting problems. <ref>http://www.nhs.uk/conditions/heart-attack/Pages/Introduction.aspx] | If the blockage isn't treated quickly, the portion of heart muscle fed by the artery begins to die. Healthy heart tissue is replaced with scar tissue. This heart damage may not be obvious, or it may cause severe or long-lasting problems. <ref>National Health Service, [http://www.nhs.uk/conditions/heart-attack/Pages/Introduction.aspx "Symptoms of a heart attack"] 2015-7-9. Retrieved on 2017-5-17.</ref> | ||
| Line 126: | Line 126: | ||
A less common cause of heart attack is a severe spasm (tightening) of a coronary artery. The spasm cuts off blood flow through the artery. Spasms can occur in coronary arteries that aren't affected by atherosclerosis. | A less common cause of heart attack is a severe spasm (tightening) of a coronary artery. The spasm cuts off blood flow through the artery. Spasms can occur in coronary arteries that aren't affected by atherosclerosis. | ||
Common heart attack signs and symptoms include<ref>[http://www.mayoclinic.org/diseases-conditions/heart-attack/basics/symptoms/con-20019520] Retrieved on 2017-5-17.</ref>: | Common heart attack signs and symptoms include<ref>Mayo Clinic Staff, [http://www.mayoclinic.org/diseases-conditions/heart-attack/basics/symptoms/con-20019520 "Heart attack, Symptoms"] 2014-11-15. Retrieved on 2017-5-17.</ref>: | ||
* Chest discomfort, mild pain | * Chest discomfort, mild pain | ||
| Line 199: | Line 199: | ||
Similarly to the interaction of humans with drones, some research has been done to look at the interaction of drones with animals. The article "Approaching birds with drones: first experiments and ethical guidelines" from Elisabeth Vas looks at birds being approached by drones. The results were quite clear. 80% of the birds let the drone come closer to them until the distance was 4 metres. Once this mark had been exceeded, the bird would back off or fly away. A result like this was to be expected, since most birds fly away at about the same distance when a human is walking towards them. It gives them enough time to escape in a safe and quick way. However, when it comes to pigeons in the city, they allow humans to come much closer than the 4 metres achieved in the research. This is probably because of the pigeons growing accustomed to humans being near them. With time, the birds will realize that they are not in danger if a human comes close to them. The same thing can happen with drones and birds. If the birds get used to the drone, they may let it come closer than before. And if this is the case, the same result may present itself when looking at human behaviour. Humans learn from experience, so once they see something more often, they grow accustomed to it. In the case of the drones, it could happen that a human lets a drone fly much closer to him or her after a while. | Similarly to the interaction of humans with drones, some research has been done to look at the interaction of drones with animals. The article "Approaching birds with drones: first experiments and ethical guidelines" from Elisabeth Vas looks at birds being approached by drones. The results were quite clear. 80% of the birds let the drone come closer to them until the distance was 4 metres. Once this mark had been exceeded, the bird would back off or fly away. A result like this was to be expected, since most birds fly away at about the same distance when a human is walking towards them. It gives them enough time to escape in a safe and quick way. However, when it comes to pigeons in the city, they allow humans to come much closer than the 4 metres achieved in the research. This is probably because of the pigeons growing accustomed to humans being near them. With time, the birds will realize that they are not in danger if a human comes close to them. The same thing can happen with drones and birds. If the birds get used to the drone, they may let it come closer than before. And if this is the case, the same result may present itself when looking at human behaviour. Humans learn from experience, so once they see something more often, they grow accustomed to it. In the case of the drones, it could happen that a human lets a drone fly much closer to him or her after a while. | ||
= Experiment Plan = | = Experiment Plan = | ||
<!-- | |||
== Code of Conduct for Drones == | == Code of Conduct for Drones == | ||
When dealing with an ambulance on the road, there are certain rules that apply to that situation to make sure the ambulance can get through the traffic as quickly as possible. Examples of this are: moving to the side of the road when an ambulance with sirens on is behind you, waiting for an ambulance to cross an intersection (even if you have the green light and the ambulance does not) and making as much room as possible in the middle of the road when you are in a traffic jam and an ambulance approaches. When it comes to drones, there are no such guidelines. This is most likely the case because drones are such a new technology. However, as drones are being used more and more, there should be a general code of conduct. This means that the drone as well as the people in its surroundings have a clear idea on how to behave. | When dealing with an ambulance on the road, there are certain rules that apply to that situation to make sure the ambulance can get through the traffic as quickly as possible. Examples of this are: moving to the side of the road when an ambulance with sirens on is behind you, waiting for an ambulance to cross an intersection (even if you have the green light and the ambulance does not) and making as much room as possible in the middle of the road when you are in a traffic jam and an ambulance approaches. When it comes to drones, there are no such guidelines. This is most likely the case because drones are such a new technology. However, as drones are being used more and more, there should be a general code of conduct. This means that the drone as well as the people in its surroundings have a clear idea on how to behave. | ||
| Line 283: | Line 252: | ||
*** Voordat een verantwoordelijke een mededeling doet als bedoeld in het eerste lid, waartegen een derde naar verwachting bedenkingen zal hebben, stelt hij die derde in de gelegenheid zijn zienswijze naar voren te brengen indien de mededeling gegevens bevat die hem betreffen, tenzij dit onmogelijk blijkt of een onevenredige inspanning kost. | *** Voordat een verantwoordelijke een mededeling doet als bedoeld in het eerste lid, waartegen een derde naar verwachting bedenkingen zal hebben, stelt hij die derde in de gelegenheid zijn zienswijze naar voren te brengen indien de mededeling gegevens bevat die hem betreffen, tenzij dit onmogelijk blijkt of een onevenredige inspanning kost. | ||
*** Desgevraagd doet de verantwoordelijke mededelingen omtrent de logica die ten grondslag ligt aan de geautomatiseerde verwerking van hem betreffende gegevens. | *** Desgevraagd doet de verantwoordelijke mededelingen omtrent de logica die ten grondslag ligt aan de geautomatiseerde verwerking van hem betreffende gegevens. | ||
--> | |||
== Assumptions == | |||
;Flying the drone by hand is similar to an autonomous flying drone: | |||
first of all, the drone should be autonomous, however since we do not have time and the materials, we will simply control the drone "by hand" in this case that means that we use either software available for the pc, or the software available on the mobile phone to control the drone. We assume that faking the autonomy by hand is realistic. | |||
;The drone is able to fly to its destination without obstacles: | |||
We assume that there are no obstacles in the way such as trees. This is done to make it safer to test the drone, but shouldnt be of much impact to the tests. | |||
;The siren is as loud as an ambulance car siren: | |||
We assume that the siren system on the drone is as loud as the normal siren on an ambulance. This is done because there is no specification on how much noise the sirens of the drone make. We take the sound of an ambulance, since its a vehicle which has similar functionality to a drone in the case that someone needs help when a person has a cardiac arrest. | |||
;The drone is good enough to represent the real AED drone in experiments : | |||
Since the drone we use is roughly the same size, we believe that we will get similar results to the real AED drone. We also believe that the level of control of the drone will be very similar to the real AED drone. We do not think that the weight of the drone will impact the tests in any way, since the drones should be able to hover in the same way. | |||
;we can use the indiviual behaviour as a basis for the bahivour of humans in a group: | |||
Another assumption we made was that we could roughly predict how a crowd would react, by looking at individual measurements. Extrapolate from the individual behaviour what problems would arise, and what would happen if the individuals were put into a group. | |||
;The starting position of the drone: | |||
Since we do not have the means to test the drone from a far away position, flying towards the test person, the drone will start above the person we are testing on. We assume this will have no significant influence, since when the AED drone will be flying towards it's destination, it will also stop above the destination before it descends. | |||
== Personal space with a drone == | |||
=== Setup === | |||
; Problem statement : What is the vertical personal space of a person in relation to a drone? | ; Problem statement : What is the vertical personal space of a person in relation to a drone? | ||
; Hypothesis : We suspect that since danger rarely comes from above, people are less used to something coming from above, and therefore the vertical personal space is greater than the horizontal personal space. | ; Hypothesis : We suspect that since danger rarely comes from above, people are less used to something coming from above, and therefore the vertical personal space is greater than the horizontal personal space. <!-- Additionally, we expect that taller people have a larger vertical personal space than smaller people. Studies have shown there is such a difference in horizontal personal space (Hartnett, J. J. (1974). “Body Height, Position, and Sex as Determinants of Personal Space.”). --> | ||
; Aim : The aim of this experiment is to see at what distance, people are still comfortable of having a drone flying above their head. | ; Aim : The aim of this experiment is to see at what distance, people are still comfortable of having a drone flying above their head. | ||
; Equipment & materials : For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we | ; Equipment & materials : For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we assume that this drone is similar enough that it will produce the same results. Furthermore, we will use a camera to record and analyse the video later on and finally we need some people to conduct the experiment on. | ||
'''Drone:''' | '''Drone:''' | ||
* Weight: 420 g | * Weight: 420 g | ||
* Size (length, width | * Size (length, width): 57cm by 57cm | ||
* Number of participants | * Number of participants | ||
Participants are informed about the procedure and what is going to happen. They are instructed to tell the drone to stop when they feel uncomfortable/unsafe for the drone to come any closer, at which point the drone operator will stop the drone's descent and register the height of the drone from the ground. Before the experiment, the participant is asked to give some general information which might have an influence on the results: | Participants are informed about the procedure and what is going to happen. They are instructed to tell the drone to stop when they feel uncomfortable/unsafe for the drone to come any closer (stop distance technique)<ref name="Approach distance with UAVs">Duncan, Brittany A. and Murphy, Robin R., "Comfortable Approach Distance with small Unmanned Aerial Vehicles" (2013). CSE Conference and Workshop Papers. Paper 240. http://digitalcommons.unl.edu/cseconfwork/240</ref>, at which point the drone operator will stop the drone's descent and register the height of the drone from the ground. Before the experiment, the participant is asked to give some general information which might have an influence on the results: | ||
'''Information beforehand (Participant)''' | '''Information beforehand (Participant)''' | ||
* Current field of study/occupation | * Current field of study/occupation | ||
* Experience with drones | * Experience with drones | ||
* Age | * Age | ||
The participants are placed standing up in the center. The participant is requested to minimize their shoulder movement or prevent any significant changes in their posture. They are allowed to move their head around freely. The drone is airborne before the participant stands on their spot and the participant will walk to the starting position underneath the drone. | |||
The participants are placed standing up in the center. The | |||
; Method : We will be using a within-subjects design (all subjects are exposed to every experiment) in order to allow a direct comparison of distance data from each participant. Let all participants get a close look at the drone in order to prevent that participants let the drone get closer in order to have a better look at it, since the technology is still novel <ref name="Approach distance with UAVs"/>. This means that during the experiment, the participant is fully aware of the drone we’re doing the experiment with. The experiment takes place outside, since no suitable open space was found indoors and it increases the realism of the experiment. The space has to have minimal windy conditions, since it could interfere with the accuracy of the experiment, due to drift of the drone. The participant is asked to be standing up during the experiment, and told to minimize their shoulder movement while conducting the experiment. The participant is free to move their head around. The drone will start 10 meters above the participant and will descend at a speed of around 0.2 m/s. The participant is requested to indicate (using the ‘stop distance technique’ <ref> Kinzel, A. F. (1970). “Body-Buffer Zone in Violent Prisoners.” American Journal of Psychiatry 127(1): 59-64. </ref>, i.e. say ‘stop’.) the drone to stop when the participant feels uncomfortable. The drone operator will stop the drone once the participant has requested to stop the drone, and will document the height at which the drone has stopped. This experiment is repeated three times on all participants. After all experiments, the participants are asked to express their feeling towards the experiment in order to evaluate if any factors might have influenced the results. | |||
; Method : We will be using a within-subjects design (all subjects are exposed to every experiment) in order to allow a direct comparison of distance data from each participant. Let all participants get a close look at the drone in order to prevent that participants let the drone get closer in order to have a better look at it, since the technology is still novel <ref | |||
; Approach angles : Personal space depends on the angle of approach. Since the angle of approach of the drone varies depending on the situation, the approach angles should not be restricted to the reference frame of the person. We use approach angles right above the person and polar coordinates {(0.5m, 0°), (0.5m, 70°), (0.5m, 90°), (0.5m, 135°), (0.5m, 180°), (0.5m, -70°), (0.5m, -90°), (0.5m, -135°), } of the person. The 70° was chosen because that is the visual range when looking straight ahead. 135° is just about out of visual range including head movement and 180° is right behind the participant. The drone descends straight down. For the horizontal distance from the person for the angles where the drone is next to the person, we use the distance found by Torta E. et al. for robot personal space <ref>Torta E., Cuijpers R.H., Juola J.F. (2013), Design of a parametric model of personal space for robotic social navigation. International Journal of Social Robotics, Vol. 5(2013), No. 3, p. 357-365</ref> for people standing up, which is 173 cm. Since we try to intersect this personal space zone, we use a horizontal distance of 0.5 meters from the person. | <!-- | ||
; Approach angles : Personal space depends on the angle of approach. Since the angle of approach of the drone varies depending on the situation, the approach angles should not be restricted to the reference frame of the person. We use approach angles right above the person and polar coordinates {(0.5m, 0°), (0.5m, 70°), (0.5m, 90°), (0.5m, 135°), (0.5m, 180°), (0.5m, -70°), (0.5m, -90°), (0.5m, -135°), } of the person. The 70° was chosen because that is the visual range when looking straight ahead. 135° is just about out of visual range including head movement and 180° is right behind the participant. The drone descends straight down. For the horizontal distance from the person for the angles where the drone is next to the person, we use the distance found by Torta E. et al. for robot personal space <ref>Torta E., Cuijpers R.H., Juola J.F. (2013), Design of a parametric model of personal space for robotic social navigation. International Journal of Social Robotics, Vol. 5(2013), No. 3, p. 357-365</ref> for people standing up, which is 173 cm. Since we try to intersect this personal space zone, we use a horizontal distance of 0.5 meters from the person. --> | |||
; Approach Height : Experiments with drones and birds <ref> Vas E, Lescroe¨l A, Duriez O, Boguszewski G, Gre´millet D. (2015), Approaching birds with drones: first experiments and ethical guidelines. Biol. Lett. 11: 20140754. http://dx.doi.org/10.1098/rsbl.2014.0754 </ref> have shown that from an approach height of 30 meters, birds rarely react to the drone and often are undisturbed by the drone from a distance of 4 meters. Other projects have been seen to start at a distance of 7 meters for a horizontal approach. For this experiment, we start at a height of 10 meters and if results show that this is inadequate, or excessive, we will adjust this height accordingly. | ; Approach Height : Experiments with drones and birds <ref name="Birds and Drones"> Vas E, Lescroe¨l A, Duriez O, Boguszewski G, Gre´millet D. (2015), Approaching birds with drones: first experiments and ethical guidelines. Biol. Lett. 11: 20140754. http://dx.doi.org/10.1098/rsbl.2014.0754 </ref> have shown that from an approach height of 30 meters, birds rarely react to the drone and often are undisturbed by the drone from a distance of 4 meters. Other projects have been seen to start at a distance of 7 meters for a horizontal approach. For this experiment, we start at a height of 10 meters and if results show that this is inadequate, or excessive, we will adjust this height accordingly. | ||
; Variables : There are a few variables in our experiment: angle of approach, height of the drone, and the length of the test person. | <!-- | ||
; Variables : There are a few variables in our experiment: angle of approach, height of the drone, and the length of the test person. | |||
; Expected result : We expect that people have a larger personal space from behind, since you can not see what is happening there. We also believe that the height might be a larger distance than the horizontal distance, since this area usually doesn't have anything above it. | ; Expected result : We expect that people have a larger personal space from behind, since you can not see what is happening there. We also believe that the height might be a larger distance than the horizontal distance, since this area usually doesn't have anything above it. | ||
; Treatment of results : We will plot the results of the experiment (height and direction of approach) on a graph with x-axis the direction and the y-axis the recorded height. To indicate the trend, we use polynomial regression. For each direction, we plot a bar chart of the results of the Likert scale according to their direction of approach. The relation between the Likert and the respective comfortable drone height is then represented in a graph with an approximating polynomial. | ; Treatment of results : We will plot the results of the experiment (height and direction of approach) on a graph with x-axis the direction and the y-axis the recorded height. To indicate the trend, we use polynomial regression. For each direction, we plot a bar chart of the results of the Likert scale according to their direction of approach. The relation between the Likert and the respective comfortable drone height is then represented in a graph with an approximating polynomial. --> | ||
==== | === Results === | ||
==== Summary ==== | |||
The experiments were conducted on a group of people consisting of 16 persons, which were a mix between male and female. Furthermore, their age was between 50 and 60. The participants indicated that they had little understanding or experience with drone technology. This age group was used as it would show how different people would react, instead of the students, which were used in an earlier stage. | |||
When the experiments were conducted, a few important remarks could be made. There was a difference in height the drone would be felt uncomfortable between the males and females of the participants. After the interview with some of the volunteers, it became transparent that the height difference was due to the boyish nature most men still have. As the women felt the drone was more dangerous, the men showed much more interest in the drone. <!-- One can conclude that the difference in opinions would be the likely cause of the height difference. --> | |||
When the second round started, it was noticeable that all participants allowed the drone to be closer than it was before. While some allowed just a little bit, quite a few allowed the drone to be an extra halve meter closer. The conclusion for this phenomenon is the unpredictable nature of the drone. One cannot predict the path the drone is going to follow, as it is not limited to directions in only possible way, like a car which can only move forward when it is already being driven. Therefore, when the second drone flight was operated, people started to thrust the drone more and allowing it to be closer to them. | |||
However, when the third round has started, people were getting a bit to overconfident due to their alcohol tolerance. While the drone was yet again allowed to fly even closer, some people let the drone fly in less than halve meter distance. This resulted in some peaks in the data that was acquired. However, the data still showed a descries in distance, as was predicted. | |||
Therefore, when taking the measurements into account, one could conclude what the best way of operation is for a drone. All of the participants allowed the drone to be in a range of less than 5 meters when the first flight was done. After multiple flights, the distance decreased and allowed the drone to be even closer. Therefore, when implementing this data with the AED Drone, one should say that the AED Drone should always fly at a distance of 5 meters from the ground for the first few years, minimalizing the time it would take for a drone to land. The data showed that if people get used to the flight of a drone, they will ease up and allow the drone to be closer. If the AED Drone is in use for a couple years, people will get used to it and therefore allowing it to fly even closer to the ground to make the fastest possible landing, which will be crucial in the golden minutes of when someone is in dire need of help. | |||
==== Analysis ==== | |||
The experiment was conducted on 16 individuals. The experiment was limited to just a drone coming from straight above the participant, because of inaccurate controls for the drone. For each person, we conducted three trials. Below is a numeric summary of the data: | The experiment was conducted on 16 individuals. The experiment was limited to just a drone coming from straight above the participant, because of inaccurate controls for the drone. For each person, we conducted three trials. Below is a numeric summary of the data: | ||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #a2a9b1; border-collapse: collapse; color: #000;" | {| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #a2a9b1; border-collapse: collapse; color: #000;" | ||
| Line 359: | Line 353: | ||
First, we construct the confidence interval for the mean distance across all data. The confidence interval is constructed as: x̄±z<sub>α/2</sub>*σ/sqrt(n). From the numeric summary we see; x̄=4.020833 σ=0.7816944 and n=48. We take a confidence of 95%, which means α=0.05 and z<sub>α/2</sub>=1.960. | First, we construct the confidence interval for the mean distance across all data. The confidence interval is constructed as: x̄±z<sub>α/2</sub>*σ/sqrt(n). From the numeric summary we see; x̄=4.020833 σ=0.7816944 and n=48. We take a confidence of 95%, which means α=0.05 and z<sub>α/2</sub>=1.960. | ||
This results the interval: [3.7997 ; 4.2420] | This results the interval: [3.7997 ; 4.2420] | ||
[[File:BoxPlot PS persons CI.png|300px]] | |||
The first result from this boxplot is the seemingly decreasing height per trial. To confirm this hypothesis, we test if we can assume that the means of the trials are the same, i.e. if the difference between trials is significant. Also, the gender boxplot seems to have a difference in distance between male and female participants. This difference is tested by an ANOVA test to test if the means of the two different genders can be assumed to be the same. | The first result from this boxplot is the seemingly decreasing height per trial. To confirm this hypothesis, we test if we can assume that the means of the trials are the same, i.e. if the difference between trials is significant. Also, the gender boxplot seems to have a difference in distance between male and female participants. This difference is tested by an ANOVA test to test if the means of the two different genders can be assumed to be the same. | ||
| Line 434: | Line 430: | ||
--> | --> | ||
From this we conclude that the means of the three trials are not equal, which means there is a significant difference of result between all trials. This however does not give us how the trials differ from each other. In order to find the actual relation between distance and trials, we create a linear model for the distance and trials. This model will be of the form Y=β<sub>0</sub> + β<sub>1</sub> * x | From this we conclude that the means of the three trials are not equal, which means there is a significant difference of result between all trials. This however does not give us how the trials differ from each other. to find this difference, we use R to create a regression model with response variable 'Distance' and explanatory value 'Trial'. First, using R, we calculate the correlation between the distance and the trial to analyse if the correlation is significant and how they might be correlated. | ||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | |||
|+ Correlation matrix | |||
! | |||
! Distance | |||
! Trial | |||
|- | |||
! Distance | |||
| 1.0000000 || -0.8048759 | |||
|- | |||
! Trial | |||
| -0.8048759 || 1.0000000 | |||
|} | |||
Since the value (-0.8048759) is negative, there is a clear negative correlation between distance and trial. Since the value is close to -1, we conclude that a linear model is sufficient for this data. | |||
In order to find the actual relation between distance and trials, we create a linear model for the distance and trials. This model will be of the form Y=β<sub>0</sub> + β<sub>1</sub> * x. Here x represents the trials. For the model values, we used R's linear model function: | |||
<!-- OLD MODEL, BAD! | |||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | {| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | ||
|+ Linear model (Distance ~ Trial) | |+ Linear model (Distance ~ Trial) | ||
| Line 451: | Line 464: | ||
! Trial 3 | ! Trial 3 | ||
| -1.5250 || 0.1675 || -9.103 || 9.07e-12 | | -1.5250 || 0.1675 || -9.103 || 9.07e-12 | ||
|} | |} --> | ||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | |||
|+ Linear model (Distance ~ Trial) | |||
! | |||
! Estimate | |||
! SE | |||
! t-value | |||
! p-value | |||
|- | |||
! Intercept | |||
| 5.54583 || 0.17907 || 30.971 || < 2e-16 | |||
|- | |||
! Trial | |||
| -0.76250 || 0.08289 || -9.199 || 5.41e-12 | |||
|} | |||
To get a proper model equation, the correct accuracy needs to be applied: | To get a proper model equation, the correct accuracy needs to be applied: | ||
<!-- | |||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | {| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | ||
|+ Linear model (Accuracy) | |+ Linear model (Accuracy) | ||
| Line 469: | Line 497: | ||
! Trial 3 | ! Trial 3 | ||
| -1.5250 || 0.1675 || 0.23 || -1.53 | | -1.5250 || 0.1675 || 0.23 || -1.53 | ||
|} --> | |||
{| style="margin: 1em 0; background-color: #f8f9fa; border: 1px solid #000; border-collapse: collapse; color: #000;" | |||
|+ Linear model (Accuracy) | |||
! | |||
! Value | |||
! SE | |||
! Accurate Value | |||
|- | |||
! Intercept | |||
| 5.54583 || 0.17907 || 5.55 | |||
|- | |||
! Trial | |||
| --0.76250 || 0.08289 || -0.763 | |||
|} | |} | ||
Therefore the model is: Y= | |||
Therefore the model is: Y=5.55-0.763x. | |||
This therefore clearly shows a significant negative correlation between the distance and the trials. The distance participants let the drone fly above their heads depends on how often they already performed the test. | This therefore clearly shows a significant negative correlation between the distance and the trials. The distance participants let the drone fly above their heads depends on how often they already performed the test. | ||
| Line 488: | Line 532: | ||
We therefore reject H<sub>0</sub>, because p<α. This means that there is at least one gender which is different from the others and because there are only two genders, we conclude that there is a significant difference between the two genders in terms of the distance to which they allow the drone to come. | We therefore reject H<sub>0</sub>, because p<α. This means that there is at least one gender which is different from the others and because there are only two genders, we conclude that there is a significant difference between the two genders in terms of the distance to which they allow the drone to come. | ||
== Individual evasive movement == | |||
=== Setup === | |||
=== | |||
; Problem statement : | ; Problem statement : | ||
How and when does an individual get out of the way of a landing drone? | How and when does an individual get out of the way of a landing drone? | ||
; Hypothesis : | ; Hypothesis : | ||
We expect that an individual will move out of the way of a landing drone as quickly as possible, which means that they move in the direction opposite from the drone position in relation to their position. We also expect the moment the individual starts moving away from the drone will | We expect that an individual will move out of the way of a landing drone as quickly as possible, which means that they move in the direction opposite from the drone position in relation to their position. We also expect the moment the individual starts moving away from the drone will correlate to the personal space results from the personal space experiment. | ||
; Aim : | ; Aim : | ||
| Line 521: | Line 544: | ||
; Equipment and materials : | ; Equipment and materials : | ||
For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we believe this drone is similar enough that it will produce the same results. Furthermore, we will use a camera to record and analyse the video later on | For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we believe this drone is similar enough that it will produce the same results. Furthermore, we will use a camera to record and analyse the video later on and finally we need some people to conduct the experiment on. | ||
'''Drone:''' | '''Drone:''' | ||
* Weight: 420 g | * Weight: 420 g | ||
* Size (length, width | * Size (length, width): 57cm by 57cm | ||
; Method : | ; Method : | ||
| Line 536: | Line 557: | ||
; Approach Height : | ; Approach Height : | ||
For consistency reasons, we start at the same height as the personal space experiment, i.e. 10 meters. If results show that this is inadequate, or excessive, we will adjust this height accordingly | For consistency reasons, we start at the same height as the personal space experiment, i.e. 10 meters<ref name="Birds and Drones"/>. If results show that this is inadequate, or excessive, we will adjust this height accordingly. | ||
; Expected result : | ; Expected result : | ||
We expect a correlation in trends between the drone height and the participants moving and the found personal space in the previous experiment | We expect a correlation in trends between the drone height and the participants moving and the found personal space in the previous experiment. For the direction in which the individual moves, we expect that it is the opposite direction from which the drone is approaching the individual. | ||
; Treatment of results : The direction in which the participants move are evaluated via an agreement score. The agreement score Ar evaluates for each approach angle which movement direction was the most agreed upon <ref> Wobbrock, J. O., Aung, H. H., Rothrock, B., & Myers, B. A. (2005). Maximizing the guess-ability of symbolic input. In Conference on Human Factors in Computing Systems - Proceedings. (pp. 1869-1872). DOI: 10.1145/1056808.1057043 </ref>: | ; Treatment of results : The direction in which the participants move are evaluated via an agreement score. The agreement score Ar evaluates for each approach angle which movement direction was the most agreed upon <ref> Wobbrock, J. O., Aung, H. H., Rothrock, B., & Myers, B. A. (2005). Maximizing the guess-ability of symbolic input. In Conference on Human Factors in Computing Systems - Proceedings. (pp. 1869-1872). DOI: 10.1145/1056808.1057043 </ref>: | ||
| Line 549: | Line 567: | ||
To evaluate the similarities between the personal space results and the moment the person starts ‘evading’ the drone in this experiment, we perform an ANOVA test on both results to test the hypothesis that these means are significantly similar. | To evaluate the similarities between the personal space results and the moment the person starts ‘evading’ the drone in this experiment, we perform an ANOVA test on both results to test the hypothesis that these means are significantly similar. | ||
=== Results === | |||
The drone was not stable enough in order to do the experiment above. We could not get the drone at the right angle and there was a danger that the drone would crash into the people who were willing to participate with the experiment. Therefore, this experiment was not used for our data. In order to fully do this experiment in the correct way, a better drone is needed. However, the parrot drone we currently used was just not stable enough. | |||
== Crowd movement == | |||
=== Setup === | |||
For the second experiment, we have taken 9 adults, from which 4 were female, and put them in group. The reasoning behind this was for to be able to see if people would react differently if they were in a group of people compared to how they acted while they were alone. The age factor of the participants was between 50 and 60 years old. The people would be dived in three groups of three, making a cubic shape and leaving halve a meter distance between them. | |||
=== Result === | |||
==== Summary ==== | |||
When preforming the personal space experiment on the group, certain trends could be seen right way. As the drone was not flying straight above all of the participants, it could be spotted that some were uneasy, as the drone was not always in sight. | |||
However, the first group whose personal space was intruded was due to the person in the middle. After interviewing, it became clear that the cause of this was due the lack of capable movement, or in other words, the amount of obstacles (other participants) present. The middle person was not able to run in any of the directions, as they were all blocked by fellow participants. | |||
The second group whose space was invaded was the front group. They lacked the constant vision on the drone, making it hard to decide where the exact location of the drone was. This caused them to feel invaded. | |||
The last group was the back group. These persons were the last group whose personal space was invaded. This was due to having constant vision on the drone and not be limited by obstacles, meaning they could jump away in every instance if they so desired. | |||
Thus, one can conclude that if the AED Drone would be flying over a busy street, its height should incorporate the feelings of the persons who cannot jump away if they wanted and might feel threatened by the drone. | |||
This | == Discussion == | ||
'''notifying the crowd''' | |||
Currently, sound are being used for alerting users in the area of a given car. This is done so that people know they should move away. For the drone, cars don't have to move away as such, however there is a crowd of people that should move away. Since the drone will be flying above houses, where there are no obstacles, sound should only be made near the destination to avoid disturbance. However, it should be on time such that people can already start moving away. We believe that a distance of about 50 meters should be sufficient to give people enough time to move away from a crowded spot and leave some place for a drone to land. according to the paper of the AED drone<ref name="TU Drone"/> the drone can accelerate and decelerate at 25 m/s^2. using the physics formula to calculate the the distance by the time and acceleration s = t + 0.5at^2, we calculate that it takes 2 seconds to accelerate at a speed of 25 m/s^2 at a distance of 50 meters. we believe 2 seconds is long enough to alert people a drone is coming, and is also short enough to optimize the amount of time it takes for the drone to land. | |||
In addition to the speed, we also believe the drone should make a distinct sound when approaching the crowd. This is done such that the people in crowd will not be confused with an ambulance, once people recognize what sound the drone makes, they will know a lot better how to react. | |||
=== Effect of the wind === | === Effect of the wind === | ||
| Line 562: | Line 598: | ||
=== Battery Life === | === Battery Life === | ||
The battery of the AR Parrot has an estimated battery life of 12 minutes. In these 12 minutes, we can roughly do one experiment on one person. This makes doing the experiment really counterproductive. Therefore, we probably will need 4 to 5 batteries to be able to do a full experiment as charging a drone takes | The battery of the AR Parrot has an estimated battery life of 12 minutes. In these 12 minutes, we can roughly do one experiment on one person. This makes doing the experiment really counterproductive. Therefore, we probably will need 4 to 5 batteries to be able to do a full experiment as charging a drone takes about 3 hours. We contacted Duarte for more batteries and received additional ones. | ||
[[File:Battery_drone.PNG|300px]] | |||
=Protocol= | =Protocol= | ||
The AED drone needs to be able to deal with big crowds. In order to improve the landing speed and safety, people in the crowd need to know what they have to do when the drone wants to land. How people react in an emergency depends on how well they are prepared, which we try to accomplish with this protocol <ref>Safety Study Emergency Evacuation of Commercial Airplanes NTSB/SS-00/01 PB2000-917002 National Transportation Safety Board, June 27, 2000</ref> | |||
==Reasoning== | |||
If a person needs to move out of the way from the drone, there is a likelihood that they will be blocked by nearby people. Therefore there needs to be a mutually understood protocol which will ensure that people move accordingly in order to make enough space. People who are closer to the drone should be prioritized and the surrounding crowd should try to help them move away from the drone. According to Helbing et. al., it is implied that people are moving with less panic and in a more controlled manner if they are feeling comfortable and relaxed.<ref name="Simulating escape panic"> Helbing, D., Farkas, I., Vicsek, T., "Simulating dynamical features of escape panic" (2000). Nature 407, 487-490. http://dx.doi.org/10.1038/35035023</ref> Therefore keeping close contact with nearby people to a minimum needs to be a priority. | |||
In conclusion people should move in a calm and controlled manner such that everybody can move out of the way whilst avoiding stress and panic by avoiding close contact with nearby people. | |||
Person calling the drone: After you have contacted the emergency services and they have informed you that they will send a drone, you shall receive instructions from the operator. | |||
The instructions will be: You will go to the nearest possible landing spot for the drone. There you shall pick up the drone and bring it to the person suffering from heart attack. | |||
Then you will attach the AED. | |||
Someone can find themselves in one of two scenarios: | |||
* A stationary crowd or a moving crowd. In the case of a stationary crowd, avoid uncoordinated motion<ref name="Simulating escape panic"/> in order to reduce fear and panic in the crowd. | |||
* In a moving crowd, avoid standing in one place in order for the flow of the crowd not to be disturbed and people getting involuntarily stuck in the crowd, which can cause panic. | |||
==Rules== | |||
When a person notices that an AED drone is in the vicinity and it indicates that it wants to land, it best that he follows the following rules: | |||
* If you are in a position near to where the drone indicates that it wants to land, you should move out of the way. | |||
* If you are not near the drone, do not stand and watch, but keep moving in order to keep the street from overcrowding. | |||
* Make sure that other people can also move out of way of the drone. | |||
* You have to make way for the caller of the drone. | |||
* Do not panic, stay alert and avoid being distracted. | |||
* Do not try to catch the drone and let it land safely. | |||
==Poster== | |||
[[File:Protocol_Poster.png|200px|Poster]] | |||
=Recommendations= | =Recommendations= | ||
The scope of this project has been the landing phase of the drone, as it is critical to do this as fast as possible. After the research on the subject, it has been found out that the AED drone has a couple of factors which can be improved. | The scope of this project has been the landing phase of the drone, as it is critical to do this as fast as possible. After the research on the subject, it has been found out that the AED drone has a couple of factors which can be improved. During this project some unexplored subjects came to light with regards to drones and human interaction. | ||
The amount of research already done in the field of human-drone interaction is limited, especially for drones above the person. We strongly recommend that more research is done in this field since, as shown by the ambulance drone, drones could improve important areas in our society. We have performed one full experiment, but we also recommend that the experiment of personal evasive movement when landing a drone is done. The experiment on personal space can also be extended with more approach angles to gain more understanding the actual personal space all around a person. When performing either of these experiments, it is strongly recommended that a stable and reliable drone is used as it can influence the results. Furthermore, we recommend that our exploratory experiment with a small crowd is repeated and extended with more participants and more trials. | |||
* | One of the assumptions in our experiment is that the participant is aware of the drone. This is however not necessarily the case in a real-life scenario. To overcome this problem we recommend a couple of key points. | ||
* Equip the drone with a siren. This is also a direct recommendation to the TU Delft ambulance drone and a repeat of their own recommendations. A problem which could occur in open spaces is that no one would notice the drone which wants to land. In order to make the people more aware of a nearby drone we propose that an alarm system should be added, which would activate when a drone nears his point of landing. Although not researched in our project, we recommend to further explore this in further research. | |||
* | * Equip the drone with landing lighting. This is another awareness measure in order to increase the landing speed. This is again a recommendation to the TU Delft ambulance drone and a repeat of their own recommendations. In order to clarify and therefore reduce panic and anxiousness from the nearby people as to where the drone wants to land, it is a good idea to add a lighting system which would indicate where the drone plans to land. Although not researched in our project, we recommend to further explore this in further research. | ||
* Make people aware of the existence of the drone. Since the use of drones is really novel at this point, before implementing an ambulance drone, people need to become aware that they could need to pay attention to something coming from above. As described in the protocol part, a protocol on how people should react would help improve how fast people get out of the way. Therefore, we highly recommend that before implementing an ambulance drone in public, first the protocol has to be distributed and promoted. | |||
=Conclusion= | =Conclusion= | ||
| Line 747: | Line 787: | ||
<!-- | |||
= Presentation = | = Presentation = | ||
Conclusion (text): | '''Intro:''' | ||
'''Problem statement/goal:''' | |||
'''Objectives:''' | |||
'''Experiment setup:''' | |||
* Participants (number, age, technological experience) | |||
* Equipment (drone, battery life) | |||
* Instructions (stand under the drone, say stop when feeling uncomfortable (stop distance technique)) | |||
* | |||
* | |||
'''Experiment assumptions:''' | |||
* Similarity between test drone and TU Delft drone | |||
* The drone is near its destination (we do not consider taking off, flying at high speeds. We only consider starting from when the drone is considering a place to land) | |||
* We assume the drone is autonomous | |||
* The drone descends at a constant speed | |||
* The drone descends straight down | |||
* | |||
'''Results + video:''' | |||
* General result | |||
[[File:BoxPlot PS persons.png|300px]] | |||
* Remarks from participants | |||
'''Discussion/results analysis:''' (implement post-hoc) | |||
* Confidence interval for the mean | |||
[[File:BoxPlot PS persons CI.png|300px]] | |||
* Difference per trial | |||
[[File:BoxPlot Personal Space.png|300px]] | |||
* Discussion | |||
'''Conclusion (text):''' | |||
* A very important factor when it comes to human interaction with drones is trust. | * A very important factor when it comes to human interaction with drones is trust. | ||
* If a person trusts a drone more, he/she will let it come a lot closer. | * If a person trusts a drone more, he/she will let it come a lot closer. | ||
| Line 755: | Line 831: | ||
* Improving the odds of survival through shorter traveling time. | * Improving the odds of survival through shorter traveling time. | ||
* Protocol needs to be learned by people so they know what to do, but this takes time (comparison with ambulance on the road). | * Protocol needs to be learned by people so they know what to do, but this takes time (comparison with ambulance on the road). | ||
Conclusion (keywords for in the slides): | Conclusion (keywords for in the slides): | ||
* Trust | * Trust | ||
| Line 761: | Line 836: | ||
* Improve survivability | * Improve survivability | ||
* Protocol | * Protocol | ||
'''Recommendations:''' | |||
* When an ambulance drone is implemented in the real world, the public needs to be informed about this. | |||
* This ensures that people are more comfortable with the drone, which by our conclusion improves the odds of survival. | |||
* People will have to become aware of what they should do when a drone wants to land near them. | |||
* The ambulance drone by the TU Delft has to increase its accuracy whilst landing in order to prevent the crowd from panicking | |||
* Further research can look how to best gain the attention of people for a drone flying above them. | |||
* Further research also should do more tests with actual crowds. | |||
* More research should be done with directing a crowd through signals (like sound or lighting). | |||
'''recomendations?''' | |||
* Alarm and lighting system - We propose a combination of alarm and lighting system for the drone in order to notify the crowd. | |||
* Informing the public - The public should be informed in order to avoid panic, which will reduce the effectiveness of the drone | |||
* Protocol - The protocol will add guidelines to how the public will react which will improve the landing speed of the drone significantly. ''' I put it as a recommendation but am not sure whether it should be here''' | |||
* Further research and tests - There should be further research on human-drone personal space, especially with the exact drone used in Delft. Also experiments regarding the notification of the crowd should be performed. | |||
--> | |||
= Planning = | |||
=== Milestones === | |||
* First presentation: 1-05-2017 | |||
* Second presentation: 26-06-2017 | |||
* Finish defining problem statement: 3-05-2017 | |||
* Finish literature study: 22-05-2017 | |||
* Finish Data analysis: 11-06-2017 | |||
* Finish Experiments for the drone: 11-06-2017 | |||
* Finish Wiki: 18-06-2017 | |||
=== Gantt Diagram === | |||
[[File:Gantt Planning - Final.png|1250px|Gantt Planning]] | |||
=== New Planning for the final 5 weeks === | |||
Week 4: Make arrangements for the experiments (drone, room, people, pick a date for next week) | |||
* Do try-out experiments (try the experiments on ourselves) | |||
* Improve experiment plan (make it very explicit, step by step) | |||
* Processing results (hypothesis, what to do when we actually get the results?) | |||
* Check our wiki with the original planning | |||
Week 5 (only Monday, Tuesday, Wednesday): | |||
* Perform experiments on test people | |||
* Analyze first data | |||
Week 6: | |||
* Perform experiments if we don’t have enough data yet | |||
* Analyze and process data | |||
Week 7: | |||
* Complete analysis of the experiments and connect the correct conclusions to them. | |||
Week 8: | |||
* Finalizing everything (presentation, wiki, evaluation, follow up research) | |||
Week 9: | |||
* presentation | |||
= Peer Review = | |||
Thom: 8 | |||
*Took a lot of work on his shoulders for the execution experiment and many other smaller tasks. Shaped a lot of the project. Overall commendable work | |||
*Most active person of the group. | |||
*Good enthousiasm, knows what needed to be done, carried out the experiments well, made important decisions when necessary. Communication could have been a bit better | |||
Rense: 7 | |||
*Did everything he needed to do and did it well. | |||
*Did a decent amount of work, nothing special to say about it. | |||
* Was an usefull member of the group. Got the things done when asked. | |||
Nikolay: 6.5 | |||
*Did work, but often needed some additional corrections. | |||
*Did some good work, about average. | |||
*Had some good input during meetings, but did not elaborate on some things he had written. The pieces he wrote were sometimes unclear and unstructured. | |||
Patrick: 4.8 | |||
* Not sure what he contributed to a larger extend to the project except for the occasional spelling check. Every time we expected him to have done work, he would not have time for it and artificially extend the deadline. | |||
*Tried to do his part for this project, but the pieces he wrote were inadequate a lot of times. They often had to be revised by someone else to make it sufficient. Also, his planning could be improved, since he always had the excuse of having no time to do his task before a deadline. If the timing is an issue, the communication needs to be better so the rest of the group knows about it. | |||
* When things on his part went wrong, he just said it at our weekly meeting instead of earlier. This resulted in work not done on time. | |||
Wessel: 7.5 | |||
* Did a nice amount of work for the experiments, however, difficult to contact (mail is a pain). | |||
* Did a great job in processing of the results, tasks he had were carried out in a structured way. Could have been more of a leader since he had a clear idea of how he wanted | |||
* Made sure the experiment plan was correct and really thought through how to use the experiments towards our goal. | |||
= References = | = References = | ||
<!-- | |||
Code of conduct: https://www.drones.nl/wetgeving http://wetten.overheid.nl/BWBR0019147/2015-11-07 https://www.anwb.nl/verkeer/veiligheid/wat-te-doen-in-verkeer-bij-sirene-en-zwaailicht | Code of conduct: https://www.drones.nl/wetgeving http://wetten.overheid.nl/BWBR0019147/2015-11-07 https://www.anwb.nl/verkeer/veiligheid/wat-te-doen-in-verkeer-bij-sirene-en-zwaailicht | ||
http://aedvergelijk.nl/aed/aed-plus | http://aedvergelijk.nl/aed/aed-plus --> | ||
<References/> | <References/> | ||
Latest revision as of 17:58, 25 June 2017
Group 5: AED Drone from TU Delft[1]
- 1. Thom Konijnenberg 0945007 t.j.c.konijnenberg (At) student.tue.nl
- 2. Rense Nijenkamp 0960705 r.c.j.nijenkamp (At) student.tue.nl
- 3. Nikolay Stoyanov 0980910 n.stoyanov (At) student.tue.nl
- 4. Wessel van der Heijden 0951686 g.w.v.d.heijden (At) student.tue.nl
- 5. Patrick Shaw 0900654 Pthom.shaw (At) gmail.com
Introduction
Every week, 300 cases of cardiac arrest will happen outside of the hospital in the Netherlands. Because it happens outside of the hospital, the survivability rate is less than 10%. This rate is tremendously low for a country in the EU. These rates are caused by the fact that after a cardiac arrest, only an AED or a defibrillator can revive the heart and with every minute passing, the chance of survival drop with another 10%. incident. This high number of casualties is caused by the relatively slow response time of emergency services (10 minutes). Brain death and permanent death start to occur in just 4 to 6 minutes.
However, the AED Drone from TU Delft is a solution for the slow response time. Because the drone is carrying an AED, it eliminates the need for a person to retrieve an EAD, which is very time costly. The drone is faster as an ambulance as well, due to the high speeds it can reach. Furthermore, as the air is much more open space than the roads have, the drone will not be limited by any form of traffic. The drone can reach the patient faster than any emergency service can and revive a person before the crucial minutes are over. However, the Drone from Delft is just a proto-type and the employment of Drones are blooming in this decade.
It is of upmost importance that the drone lands as fast as possible and to be able to land everywhere. However, the TU Delft only tested the prototype in optimal situations where there were no external factors. The goal of this project is to learn how people react to drones when it tries to land as fast as possible and as close as possible to the patient.
In order to show the assumptions that have been taken, a scenario is made which shows the difference between the implementation of a drone and without the implementation A man, aged 54, is taking a stroll through the centrum of Eindhoven on a hot Saturday. Suddenly, he is feeling unwell and decides to rest on a nearby bench. However, as he is sitting down, he feels a great pain coming from his chest. The pain is so severe that he can not cry out for help and collapses on the bench. In total, thirty seconds have been passed since he collapsed. A nearby bystanders tries to make contact but fails to achieve so and therefore decides to call the emergency number. A crowd starts to form around the collapsed man. The call is made and contact is established with the emergency contact center. On this moment, one minute has passed already while the bystander starts to reanimate the man.
- The closest ambulance is contacted and has been giving orders to move to the location of the emergency. However, the traffic is terrible and causes the ambulance to loose precious seconds. With great hurry, the ambulance tries to move as fast as possible through the crowd but struggles a bit due to the amount of people that have to move out of the way. In total the ambulance took 6 minutes to arrive at the scene, making the total amount 7 minutes. They try to revive the man with the use of a defibrillator. The man has a survivability rate of less than 50%.
- Another bystander who notices the call to the emergency center tried to help by retrieving the nearest AED and using it on the collapsed man. The bystander pulls out a phone and tries to locate the nearest AED. This takes 1 minute as not every AED on the map is available in the weekend. The bystander starts running in order to reach the AED, located 350 meters from the emergency location, on time. The running, retrieving, and running back will take another 5 minutes. In total 7 minutes have passed and the AED has to be used through the help of a bystander
- The emergency center sends the closest drone to the emergency location. Due to the high-speed of the drone, it reaches the location within one minute and starts to land slowly. When contact with the ground is made, less than 3 minutes have passed. The AED has to be used through the help of a bystander.
Problem statement
Speed is one of the most important factor in saving lives. This has been mentioned in the introduction and will affect the problem statement as well. Currently, the drone is used in optimal situations, which are not present in every situation. For this project, the landing of the drone will be tackled. Landing a drone can be done in multiple ways, making great use of the speed the drone has. However, the landing will not be done on a landing site, landing will be done when there is a crowd of people.
There is not much research done on how people feel about drones when they are up-close. If a drone must land as fast as possible, it will try to arrive at a low altitude in order to have a low amount of time needed to land. However, to what extent does this influence the behavior of the people who are close to the drone. A drone is different than an ambulance, as it does not show a predictable course when it is moving towards a location. Furthermore, the downstream of wind is a feeling people are not experienced with and may cause fear.
Because the drone is not an object people are used to, an experiment will be done in order to see the effect the drone has on people when it needs to land as fast as possible. If people will move unpredictable, they may locate themselves in positions that are unfavorable for the landing of the drone. More information about the experiment can be found in the experiment plan.
Approach
- Literature research.
While there is not much information available about how people react when a drone is trying to land as fast as possible, a lot of information is available about the TU Delft drone. When the capabilities of the drone are known, ideas can be formed on how the experiment needs to be done and if adjustments are necessary for the future. The state of the art can be researched, which will give a lot of insight on the possibilities the drone may have.
Despite the lack information regarding the relations between human and drone, there is a lot of information and references which show the proper base for the experiment that is going to be conducted. Other groups have conducted experiments, which we will be able to use to create ouw own experiment.
- Experiment
An experimentation on how people will react when a drone is close by. As mentioned above, there is not much information regarding how people react when drones are close but this give us a base of approach. The experiment will give insight on how people tend to react when the drone is flying above them. Furthermore, this will give information about the personal space one feels when a drone is flying above a person. These kind of experiments should result in proper data which would allow us to what extend a drone can fly without creating any hindrance for nearby bystanders or be hindered by the reaction of bystanders.
- Environment
The project is going to be focused on the environment aspect. The people who are not part of the crisis situation will have an effect on how the drone must reach its location. Therefore it is important to learn and know how the environment, or the crowd in this research, will be affected.
AED Map
Based on the AED map, made by the Red cross, one can pinpoint every location of an AED. However, one can conclude that there are certain area’s which are not covered by AEDs. From every AED, a circle is drawn with a radius of 500 meters. This is based on the distance one could access the situation, locate the nearest AED, retrieve it, and apply the AED to the patient. The 500 meters will take almost 10 minutes, giving the patient a chance of less than 10%. The biggest issue is still the time it takes to return with an AED. In order to get the survivability to reasonable numbers, the time must be made shorter. To get an response time within 3 minutes, which are called the golden minutes, is the main goal, as after 3 minutes brain damage will be caused. (link to Nikolay and picture of Alec mont). Therefore, help needs to arrive quickly in order to make a full recovery. The 500 meter are in reality little to 50 meter if one wants to apply the AED in the golden minutes.

For the current map, an area of 28 square kilometers has been taken, in which 60 AEDs are visible. These 60 cover about 50% of the area. Furthermore, of these 60 AEDs, about 40% are accessible at any given time, while the remainder is limited to the business hours of its location. Placing more AEDs in strategical places is an costly project. Most of the AEDs are over the price range of 1000 Euro and need an outside protector, otherwise it will be limited to the opening hours of its location. At the moment, an AED is placed when the owner feels the need to buy one or when it is a public building. This causes area’s which are used for homes and not for businesses or public buildings to be left without an AED. It can be seen on the map that those areas are usually more than 1 kilometer removed from the nearest AED. This will be almost certain death.
Because the time in which a cardiac arrest happens and the time a person calls the emergency number is already so costly on the patients live, a faster system must be used. The AED Drone has a response time of 1 minute inside its 2 kilometer radius. Because of this response time, the chances of survivability are greatly improved. At the moment, there is no better solution as the AED drone brings help at an unraveled speed, helping the patient in the golden minutes. This is caused by the speed of the drone and lack of traffic it finds on its path. Placing AED Drones around Eindhoven, will not only be the cheaper solution, compared to strategically placing AEDs everywhere, it will bring the needed equipment in the most critical minutes of the patients life.
Objectives
- Research on how the crowd reacts to a drone landing from above
- Create a protocol people should folliw if the drone is in use
- Research on how the drone does not disturb the crowd to a large extend.
- Improve the landing speed of the drone
USE
User
The users for the AED drone are different than users normally are, as the users from the AED drone are not prepared and is mostly forced upon them. When one comes across a collapsed person who has cardiac arrest, the user has to dail the emergency number and a drone will be send towards the location using the GPS of the person who called the emergency number. After a couple of minutes, when the AED Drone has arrived, further instructions will be provided, as is the norm with an AED. This is one user for the AED drone, the one helping the patient. However, there are more users involved in this matter. Obviously, there is the patient himself. Even though the patient does not use the product, he has the most interest in the product being used well, since it's his life that is on the line. There is also the operator behind the drone who will send the drone and assist in the process of applying the AED after the drone has arrived. Another important user is the emergency services. The drone itself can be considered as a part of the ambulance system. The government and insurance companies are also indirect users of the drone. Also the drone will need maintenance so the people who provide should also be considered as users.
Primary user
- People, who are going to make the phone call and provide the needed assistance to the people described on the next line.
- People, suffering from heart attack and on which the AED will be used.
- People, who will operate the drone and provide assistance to the user who is making the call.
Secondary user
- Hospital - The AED drone in function and usability is similar to an ambulance, therefore it is provided that the drone is connected to the hospital(emergency services).
Tertiary user
- Government - The government is a big factor as it will introduce the AED drone as part of the healthcare system.
- Insurance - The AED drone is going to save lives and is connected to the health of the people, therefore the insurance has a role.
- Maintenance - The AED drone is fundamentally a mechanical tool and will need experts who will ensure that it always performs as needed.
Society
For society, this idea has a lot of impact. When a drone is used to help people survive a heart attack or other urgent healthcare problems, there are a number of issues which need to be dealt with:
- Privacy. Should the drone be able to access all locations? For example: entering someone’s garden in order to get to the victim. This is very important to the research because we are trying to save lives. However, this can't be achieved without thinking about the people. They need to specify what is acceptable for a drone. Taking a shortcut through another person's garden might increase the chances of survival for a patient, but the privacy of the bystander is at risk.
- Crowd control. What are the effects on a crowd of people when a drones passes by at high speeds? For example: a drone could cause a lot of panic within a crowd. Again, the same principle as before applies here. How far can the drone go in order to save lives? It should always be safe, but it should also handle a group of people with enough caution, but also have enough speed to get to its destination quickly.
- Parking. How can a parking space be created? How can you get a group of people to make room in an efficient way?
These three main issues focus on society’s opinions and behaviour. This needs to be analyzed by investigating completed studies on a variety of subjects regarding society’s view towards robotics used for healthcare. It is also important to look at the current rules that apply for emergency services such as the ambulance helicopter.
Enterprise
The main enterprises that will be impacted by this idea are:
- Insurance companies
- Hospitals and government
- Drone manufacturers
These enterprises have different interests when it comes to this idea. Whereas the hospitals, government and drone manufacturers might want there to be as many drones like this as possible, the insurance companies might not want this to happen. At the end of the day, the insurance companies main objective is to make profit. Having some expensive drones save lives might be more costly than deploying a “normal” ambulance, which will be more beneficial for the insurance companies. However, the survival of a patient might be worth a lot more than the costs of the drone. A person's life can't really be expressed in terms of money, so there are conflicting interests.
Issues
The ambulance drone is an unmanned aerial vehicle which means that it will need to use a camera in order for it to be operated. The drone will also move in crowded environments and will eventually interact with people. Therefore there are many issues concerning it’s behaviour. There should be rules concerning the ambulance drone, however there are currently no rules specifically for an unmanned ambulance drone, and therefore the drone will have to abide by the rules of consumer or business drones, which will currently prevent this project from taking off for real use. The good side is that there is a possibility that this project can be approved and have exceptional rules concerning it. However, for it to be approved, the drone must overcome dangers and ethical issues which will be discussed in the following sections.
Privacy
The camera itself brings a lot of issues concerning privacy. It is easy for a drone with a camera to gather different kinds of data. If a person is inputting his email on a computer, a drone can easily hover behind him unnoticed whilst recording it. Then it is needless to say that the person who has access to the video can without trouble learn the credentials of this email. Also people do not want to be seen what they are doing in their homes which can be unnoticably done by a drone. Drones can also be used for gathering economical data such as who are the people shopping on a given street [2]. The drone’s purpose however is not to use the camera with such intentions and therefore some rules regarding the drones should be omitted and concern the ambulance drone. Even if such a drone may sometimes endanger invade the privacy of a person, that camera is needed for the drone to deliver life-saving functionality which is a reasonable trade-off.
Criminality
According to an article [3] a man has shot down a drone which was flying over his yard. That same man has been sued by the owner of the drone and the judge ruled the man to be innocent. However during the case there has been discussion of the height at which the drone was flying. Which leads to the conclusion that if the drone has been flying high enough the man would not be legally allowed to shoot down the drone. The drone is supposed to fly high above the ground and at reasonable speed which means that people who try to shoot down or steal such a drone will not have done so with concern for their privacy, but with violent intentions and should be brought to justice for destroying/stealing government property.
Safety
There are also many issues concerning the safety of such a drone. This is why there are many rules to prohibit drones in many places. Many of these rules have been stated in the code of conduct for drones, however there are a couple of modifications that are needed for the AED.
The current regulations for drone do not allow drones to be flown over cities, buildings and people. However if all the regulations for regular drones are applied to the AED drone the project will be stopped. More importantly this would also be true for ambulances or police cars, but the society has decided that those privileges are a good trade off for a more secure environment. The AED drone will be considered safe to fly over crowded environment and will be operated in such a manner that it will not provide any privacy issues within the society. The purpose of the drone would be to fly from A to B as fast as possible and will therefore cause no problems, apart from when it is landing, but this is a good trade-off in order to increase the survival rate from heart attacks.
Liability
If AED drones were allowed to fly in cities, we get the following problem of who is responsible for the drones. since these drones are autonomous we have no direct control over where they fly, and thus there is always a possibility of the drone crashing into objects. There are many studies about autonomous robots and their liability [reference]. Currently we do not know who is responsible if such a drone crashes, which will be more clear if there are any regulations in place.
So even though there are a lot of problems when it comes to implementing the AED drone into society, an exception needs to be made. When it comes to saving lives, the law suddenly is not that important anymore. For example: an ambulance on the road is allowed to cross a red light at an intersection if it is in a hurry to get to a patient or a hospital. The same principle can apply to the AED drone. If all laws are taken into account, the AED drone simply would not be able to exist. It would be illegal, meaning the project is dead. Since this is a shame and we believe there is actually a future with the drone in it, we assume that the AED drone is allowed to break the law in cases of emergency. What's left to find out is how far the drone can go with this. The next step is to find out what a group of people think is acceptable behaviour for the AED drone in order to save lives.
Theory
- Coronary Heart Disease -
Heart attacks most often occur as a result of coronary heart disease (CHD), also called coronary artery disease. CHD is a condition in which a waxy substance called plaque builds up inside the coronary arteries. These arteries supply oxygen-rich blood to your heart. When plaque builds up in the arteries, the condition is called atherosclerosis. The buildup of plaque occurs over many years. Eventually, an area of plaque can rupture (break open) inside of an artery. This causes a blood clot to form on the plaque's surface. If the clot becomes large enough, it can mostly or completely block blood flow through a coronary artery. If the blockage isn't treated quickly, the portion of heart muscle fed by the artery begins to die. Healthy heart tissue is replaced with scar tissue. This heart damage may not be obvious, or it may cause severe or long-lasting problems. [4]

- Coronary Artery Spasm -
A less common cause of heart attack is a severe spasm (tightening) of a coronary artery. The spasm cuts off blood flow through the artery. Spasms can occur in coronary arteries that aren't affected by atherosclerosis.
Common heart attack signs and symptoms include[5]:
- Chest discomfort, mild pain
- Coughing
- Nusea
- Vomiting
- Crushing chest pain
- Pressure tightness, pain, squeezing or aching in the chest or arms that spreads to the neck, jaw, or back
- Dizziness
- Dyspnea (shortness of breath)
- Face seems gray
- A feeling of terror that your life is coming to its end
- Feeling really awful (general feeling)
- Restlessness
- Feeling clammy and sweaty
- Shortness of breath
Heart attack risk factors include:
- Age. Men age 45 or older and women age 55 or older are more likely to have a heart attack than are younger men and women.
- Tobacco. Smoking and long-term exposure to secondhand smoke increase the risk of a heart attack.
- High blood pressure. Over time, high blood pressure can damage arteries that feed your heart by accelerating atherosclerosis. High blood pressure that occurs with obesity, smoking, high cholesterol or diabetes increases your risk even more.
- High blood cholesterol or triglyceride levels. A high level of low-density lipoprotein (LDL) cholesterol (the "bad" cholesterol) is most likely to narrow arteries. A high level of triglycerides, a type of blood fat related to your diet, also ups your risk of heart attack. However, a high level of high-density lipoprotein (HDL) cholesterol (the "good" cholesterol) lowers your risk of heart attack.
- Diabetes. Insulin, a hormone secreted by your pancreas, allows your body to use glucose, a form of sugar. Having diabetes — not producing enough insulin or not responding to insulin properly — causes your body's blood sugar levels to rise. Diabetes, especially uncontrolled, increases your risk of a heart attack.
- Family history of heart attack. If your siblings, parents or grandparents have had early heart attacks (by age 55 for male relatives and by age 65 for female relatives), you may be at increased risk.
- Lack of physical activity. An inactive lifestyle contributes to high blood cholesterol levels and obesity. People who get regular aerobic exercise have better cardiovascular fitness, which decreases their overall risk of heart attack. Exercise is also beneficial in lowering high blood pressure.
- Obesity. Obesity is associated with high blood cholesterol levels, high triglyceride levels, high blood pressure and diabetes. Losing just 10 percent of your body weight can lower this risk, however.
- Stress. You may respond to stress in ways that can increase your risk of a heart attack.
- Illegal drug use. Using stimulant drugs, such as cocaine or amphetamines, can trigger a spasm of your coronary arteries that can cause a heart attack.
- A history of preeclampsia. This condition causes high blood pressure during pregnancy and increases the lifetime risk of heart disease.
- A history of an autoimmune condition, such as rheumatoid arthritis or lupus. Conditions such as rheumatoid arthritis, lupus and other autoimmune conditions can increase your risk of having a heart attack.
The Drone in use
The AED drone’s design has be narrowed down to 2 choices:

The AED drone will respond to phone calls regarding heart attacks nearby. It works as follows: A person (close to the person suffering from heart attack) calls the given number. He gets instructions on where the drone will arrive. Parallel to that an AED drone is dispatched to the calling peron’s location. The drone is supposed to autonomously travel at 200 km/h to the target location. However currently there is no collusion avoidance which works flawlessly at the target speed, so the drones may need to be operated manually until that technology is created. When the drone arrives it is picked up by the calling person who is supposed to bring it close to the person suffering from heart attack. The drone itself is equipped with a camera and microphone so the interaction between the operator and the people at the spot is achieved easily. After the drone is placed next to the patient, an able person is supposed to attach the defibrillator in the following way:

Since the AED drone has a camera and operator he is the one who times the shock pauses needed. After a while, hopefully the person suffering from heart attack has recovered, an ambulance arrives at the site. That is when the AED drone is no longer needed, and is returned to it’s base.
State of the Art
AED
The drone should carry an AED. An AED is not very heavy or big, so it should be easy to put this inside the drone and fly with it without any issues.
Navigation
For the purpose of navigating the drone to a specified location, a gps would be needed. Currently GPSis accurate to about 5 meters in the horizontal direction, however the european Galileo navigation system is accurate to 1 meter, and 1 cm for the army. This is more than accurate enough to fly the drone to a destination. However, what GPS cannot do is to modify the navigation based on obstacles in between the current position and the destination. for this, an internal system will have to be used. A camera can be used to see whether there are obstacles in the way, or additionally, there could be some sort of ultrasonic sensing where you map the area in proximity of the drone, and build an obstacle map from there. Since this is a very vague and complex idea, we will not be focussing on implementing this. We make the assumption that the drone is able to fly to its destination without having to overcome any obstacles. The path from A to B can be completed simply by using GPS
Communication
Since the drone operator would have to communicate with the AED user, the drone would need some sort of communication system. This system would include sound recording and image recording, since the operator needs to be able to see what the drone is doing, and where the drone is at all times, as well as assisting the user with the AED. To enable the operator to have access to the video and sound feeds from the drone, the drone would have to be connected to a network where it can send the feeds to the operator. In the Netherlands, the 4G coverage is 80-99% of the Netherlands depending on which network you are. 4G also has a speed of 150 mbit/s which should be more than enough to transmit full hd (1920x1080 pixels) video. This enables the communication of the drone to run smoothly if necessary. In an ideal situation, the drone will be able to reach its destination without any supervision, but if it cannot, the communication should be adequite for both the operator and the user on the ground to cooperate and make the drone perform its task.
Drone Design
It is important that the drone used has a distinctive color since it is an emergency service just like an ambulance. The drone used by the University of Delft is painted in exactly the same colors as a normal ambulance on the road, and we agree with this design. If the AED drone gets implemented into society, the task it performs will be very similar to the job of an ambulance: save as many lives as possible. Therefore it's not that hard to think that the AED drone will be part of the emergency services regarding healthcare, so giving the drone the same color design as the ambulance is the right choice. Another important part of the drone's appearance is the sound it makes. When it comes to this characteristic, we believe the drone should not make the same sound as an ambulance. This is the case because when one hears the sirens of an ambulance, the person immediately has an idea of what to expect. The person expects a car to appear. However, if one hears the same sound approaching but it comes from a drone instead of an ambulance, the person will still expect to see an ambulance. This has a big impact on the person's behaviour, which is not wat we want. One should react differently to a drone than to an ambulance. Also, when one hears the sound, they should know right away what to expect. Therefore, we want the drone to make a clearly distinguishable sound from an ambulance. A sound which notifies the people in the area that something is going on, which a unique melody and tone to it so that it cannot be confused with the sound of an ambulance.
Drone Specifications
Other specs which matter when it comes to the drone are the actual performace specifications. The acceleration of the drone used in the Delft project is 18 m/s2 and its top speed is 135 km/h. This is just the protoype, however. The final product is destined to have an acceleration of 25 m/s2 and the top speed will be 200 km/h. For now, we will use the specs from the prototype, since this is already built and verified. This means the drone will reach its top speed in just over 2 seconds and it is able to reach its destination a kilometer away in just 26.7 seconds when operating at maximum speed. Victims can be reached very quickly with these specifications already, but as mentioned before, the actual product will have even better performance, so even more lives can be saved. The drone needs to carry an AED with it, so it needs to have enough thrust to be able to carry this extra weight with it. The prototype is able to carry a weight of 6 kg's, but the finalized product will be able to carry a weight of 8 kg's. Since an AED weighs only about 3 kg's, the drone could even carry other items on board such as a regular first aid kit.
Personal Space Regarding Drones
Some research has already been performed on the human interaction with drones. One of these researchers is Jessica R. Cauchard. In her article "Drone & Me: An Exploration Into Natural Human-Drone Interaction" she discusses how people interact with drones. What is interesting is that the majority of people interact with drones in the same way as they would with another human or a pet. So even though a drone is not a living thing, it is not really treated like a machine. This is probably because it is able to fly around you on its own without you being in control. This is vastly different behaviour from for example, a computer. When using this, the user is always in complete control and the machine does nothing if the user doesn't tell it to. It also is not moving, which is a big contributor to the living aspect of a machine. Some machines do actually move, cars for example. However, when it comes to cars, the user is in complete control and similarly to the computer, the car does not do anything without the user telling it to. So the combination of (partial) autonomy and the ability to move around gives many users the idea that the drone is a living thing, when of course, it is not.
Similarly to the interaction of humans with drones, some research has been done to look at the interaction of drones with animals. The article "Approaching birds with drones: first experiments and ethical guidelines" from Elisabeth Vas looks at birds being approached by drones. The results were quite clear. 80% of the birds let the drone come closer to them until the distance was 4 metres. Once this mark had been exceeded, the bird would back off or fly away. A result like this was to be expected, since most birds fly away at about the same distance when a human is walking towards them. It gives them enough time to escape in a safe and quick way. However, when it comes to pigeons in the city, they allow humans to come much closer than the 4 metres achieved in the research. This is probably because of the pigeons growing accustomed to humans being near them. With time, the birds will realize that they are not in danger if a human comes close to them. The same thing can happen with drones and birds. If the birds get used to the drone, they may let it come closer than before. And if this is the case, the same result may present itself when looking at human behaviour. Humans learn from experience, so once they see something more often, they grow accustomed to it. In the case of the drones, it could happen that a human lets a drone fly much closer to him or her after a while.
Experiment Plan
Assumptions
- Flying the drone by hand is similar to an autonomous flying drone
first of all, the drone should be autonomous, however since we do not have time and the materials, we will simply control the drone "by hand" in this case that means that we use either software available for the pc, or the software available on the mobile phone to control the drone. We assume that faking the autonomy by hand is realistic.
- The drone is able to fly to its destination without obstacles
We assume that there are no obstacles in the way such as trees. This is done to make it safer to test the drone, but shouldnt be of much impact to the tests.
- The siren is as loud as an ambulance car siren
We assume that the siren system on the drone is as loud as the normal siren on an ambulance. This is done because there is no specification on how much noise the sirens of the drone make. We take the sound of an ambulance, since its a vehicle which has similar functionality to a drone in the case that someone needs help when a person has a cardiac arrest.
- The drone is good enough to represent the real AED drone in experiments
Since the drone we use is roughly the same size, we believe that we will get similar results to the real AED drone. We also believe that the level of control of the drone will be very similar to the real AED drone. We do not think that the weight of the drone will impact the tests in any way, since the drones should be able to hover in the same way.
- we can use the indiviual behaviour as a basis for the bahivour of humans in a group
Another assumption we made was that we could roughly predict how a crowd would react, by looking at individual measurements. Extrapolate from the individual behaviour what problems would arise, and what would happen if the individuals were put into a group.
- The starting position of the drone
Since we do not have the means to test the drone from a far away position, flying towards the test person, the drone will start above the person we are testing on. We assume this will have no significant influence, since when the AED drone will be flying towards it's destination, it will also stop above the destination before it descends.
Personal space with a drone
Setup
- Problem statement
- What is the vertical personal space of a person in relation to a drone?
- Hypothesis
- We suspect that since danger rarely comes from above, people are less used to something coming from above, and therefore the vertical personal space is greater than the horizontal personal space.
- Aim
- The aim of this experiment is to see at what distance, people are still comfortable of having a drone flying above their head.
- Equipment & materials
- For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we assume that this drone is similar enough that it will produce the same results. Furthermore, we will use a camera to record and analyse the video later on and finally we need some people to conduct the experiment on.
Drone:
- Weight: 420 g
- Size (length, width): 57cm by 57cm
- Number of participants
Participants are informed about the procedure and what is going to happen. They are instructed to tell the drone to stop when they feel uncomfortable/unsafe for the drone to come any closer (stop distance technique)[6], at which point the drone operator will stop the drone's descent and register the height of the drone from the ground. Before the experiment, the participant is asked to give some general information which might have an influence on the results:
Information beforehand (Participant)
- Current field of study/occupation
- Experience with drones
- Age
The participants are placed standing up in the center. The participant is requested to minimize their shoulder movement or prevent any significant changes in their posture. They are allowed to move their head around freely. The drone is airborne before the participant stands on their spot and the participant will walk to the starting position underneath the drone.
- Method
- We will be using a within-subjects design (all subjects are exposed to every experiment) in order to allow a direct comparison of distance data from each participant. Let all participants get a close look at the drone in order to prevent that participants let the drone get closer in order to have a better look at it, since the technology is still novel [6]. This means that during the experiment, the participant is fully aware of the drone we’re doing the experiment with. The experiment takes place outside, since no suitable open space was found indoors and it increases the realism of the experiment. The space has to have minimal windy conditions, since it could interfere with the accuracy of the experiment, due to drift of the drone. The participant is asked to be standing up during the experiment, and told to minimize their shoulder movement while conducting the experiment. The participant is free to move their head around. The drone will start 10 meters above the participant and will descend at a speed of around 0.2 m/s. The participant is requested to indicate (using the ‘stop distance technique’ [7], i.e. say ‘stop’.) the drone to stop when the participant feels uncomfortable. The drone operator will stop the drone once the participant has requested to stop the drone, and will document the height at which the drone has stopped. This experiment is repeated three times on all participants. After all experiments, the participants are asked to express their feeling towards the experiment in order to evaluate if any factors might have influenced the results.
- Approach Height
- Experiments with drones and birds [8] have shown that from an approach height of 30 meters, birds rarely react to the drone and often are undisturbed by the drone from a distance of 4 meters. Other projects have been seen to start at a distance of 7 meters for a horizontal approach. For this experiment, we start at a height of 10 meters and if results show that this is inadequate, or excessive, we will adjust this height accordingly.
Results
Summary
The experiments were conducted on a group of people consisting of 16 persons, which were a mix between male and female. Furthermore, their age was between 50 and 60. The participants indicated that they had little understanding or experience with drone technology. This age group was used as it would show how different people would react, instead of the students, which were used in an earlier stage.
When the experiments were conducted, a few important remarks could be made. There was a difference in height the drone would be felt uncomfortable between the males and females of the participants. After the interview with some of the volunteers, it became transparent that the height difference was due to the boyish nature most men still have. As the women felt the drone was more dangerous, the men showed much more interest in the drone.
When the second round started, it was noticeable that all participants allowed the drone to be closer than it was before. While some allowed just a little bit, quite a few allowed the drone to be an extra halve meter closer. The conclusion for this phenomenon is the unpredictable nature of the drone. One cannot predict the path the drone is going to follow, as it is not limited to directions in only possible way, like a car which can only move forward when it is already being driven. Therefore, when the second drone flight was operated, people started to thrust the drone more and allowing it to be closer to them.
However, when the third round has started, people were getting a bit to overconfident due to their alcohol tolerance. While the drone was yet again allowed to fly even closer, some people let the drone fly in less than halve meter distance. This resulted in some peaks in the data that was acquired. However, the data still showed a descries in distance, as was predicted.
Therefore, when taking the measurements into account, one could conclude what the best way of operation is for a drone. All of the participants allowed the drone to be in a range of less than 5 meters when the first flight was done. After multiple flights, the distance decreased and allowed the drone to be even closer. Therefore, when implementing this data with the AED Drone, one should say that the AED Drone should always fly at a distance of 5 meters from the ground for the first few years, minimalizing the time it would take for a drone to land. The data showed that if people get used to the flight of a drone, they will ease up and allow the drone to be closer. If the AED Drone is in use for a couple years, people will get used to it and therefore allowing it to fly even closer to the ground to make the fastest possible landing, which will be crucial in the golden minutes of when someone is in dire need of help.
Analysis
The experiment was conducted on 16 individuals. The experiment was limited to just a drone coming from straight above the participant, because of inaccurate controls for the drone. For each person, we conducted three trials. Below is a numeric summary of the data:
| Mean | Standard deviation | IQR | Min | Median | Max | n | |
|---|---|---|---|---|---|---|---|
| All Trials | 4.020833 | 0.7816944 | 1 | 2.3 | 4 | 5.6 | 48 |
| Trial 1 | 4.79375 | 0.5384778 | 0.800 | 4.0 | 4.80 | 5.6 | 16 |
| Trial 2 | 4.00000 | 0.3829708 | 0.725 | 3.5 | 4.05 | 4.5 | 16 |
| Trial 3 | 3.26875 | 0.4867837 | 0.725 | 2.3 | 3.20 | 4.0 | 16 |
-
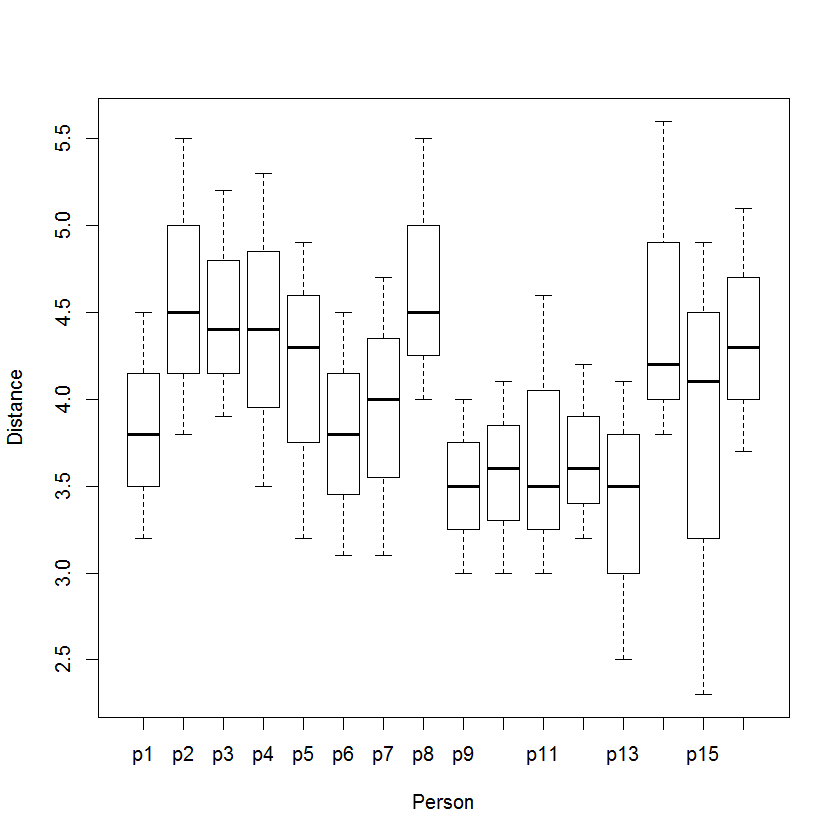
Personal space per person -
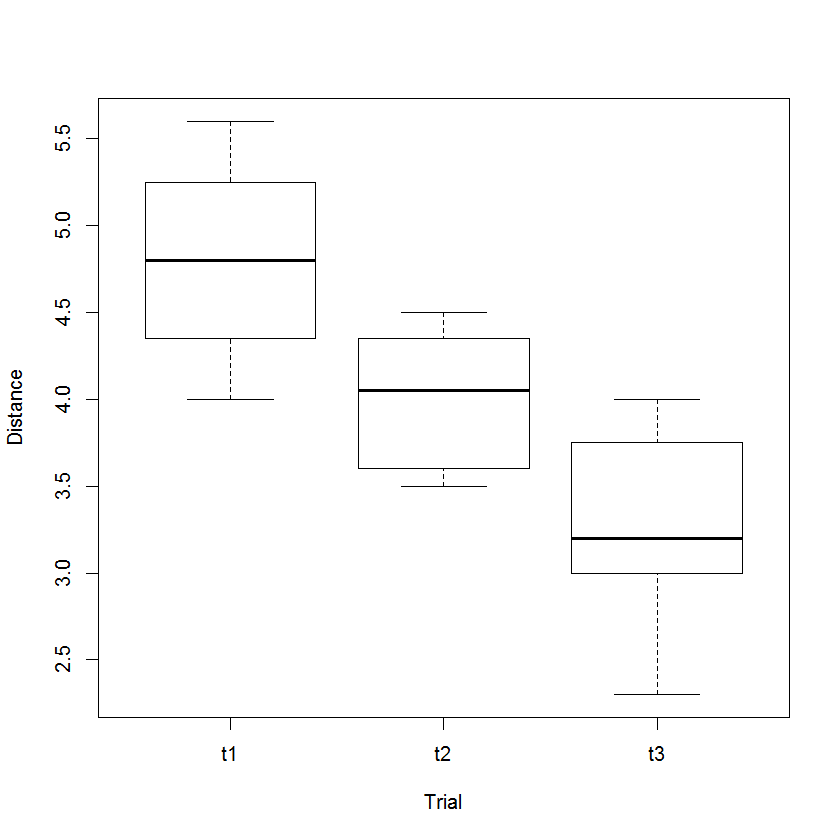
Personal space per trial -
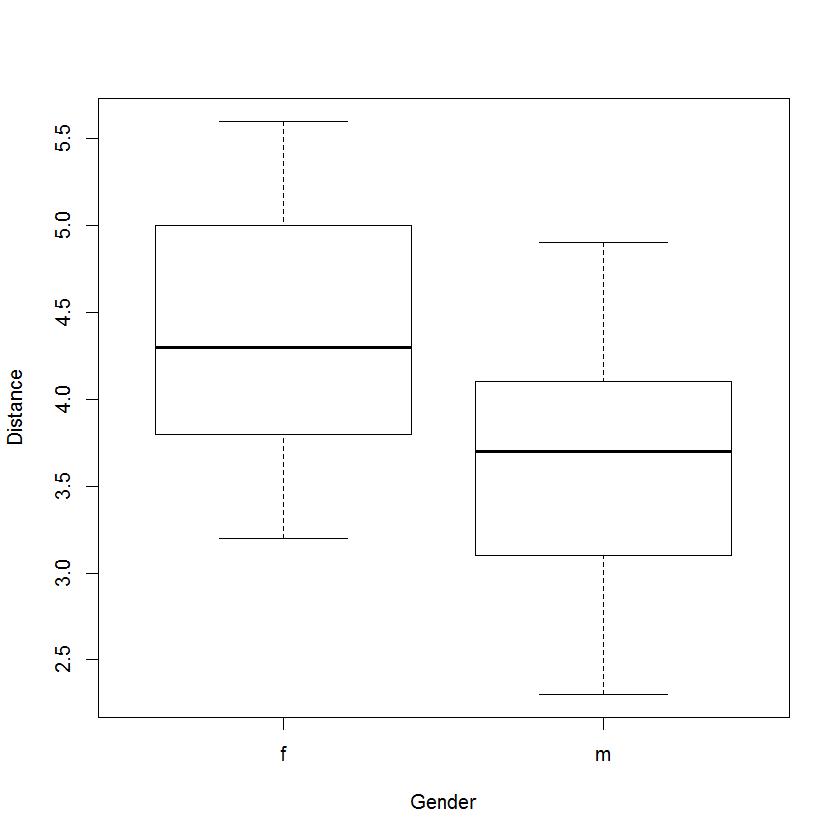
Personal space per gender



First, we construct the confidence interval for the mean distance across all data. The confidence interval is constructed as: x̄±zα/2*σ/sqrt(n). From the numeric summary we see; x̄=4.020833 σ=0.7816944 and n=48. We take a confidence of 95%, which means α=0.05 and zα/2=1.960. This results the interval: [3.7997 ; 4.2420]

The first result from this boxplot is the seemingly decreasing height per trial. To confirm this hypothesis, we test if we can assume that the means of the trials are the same, i.e. if the difference between trials is significant. Also, the gender boxplot seems to have a difference in distance between male and female participants. This difference is tested by an ANOVA test to test if the means of the two different genders can be assumed to be the same.
Before we test if the means can be assumed to be the same, we first test if we can assume the data follows a normal distribution. To test this, we plot a Quantile Comparison Plot:
-
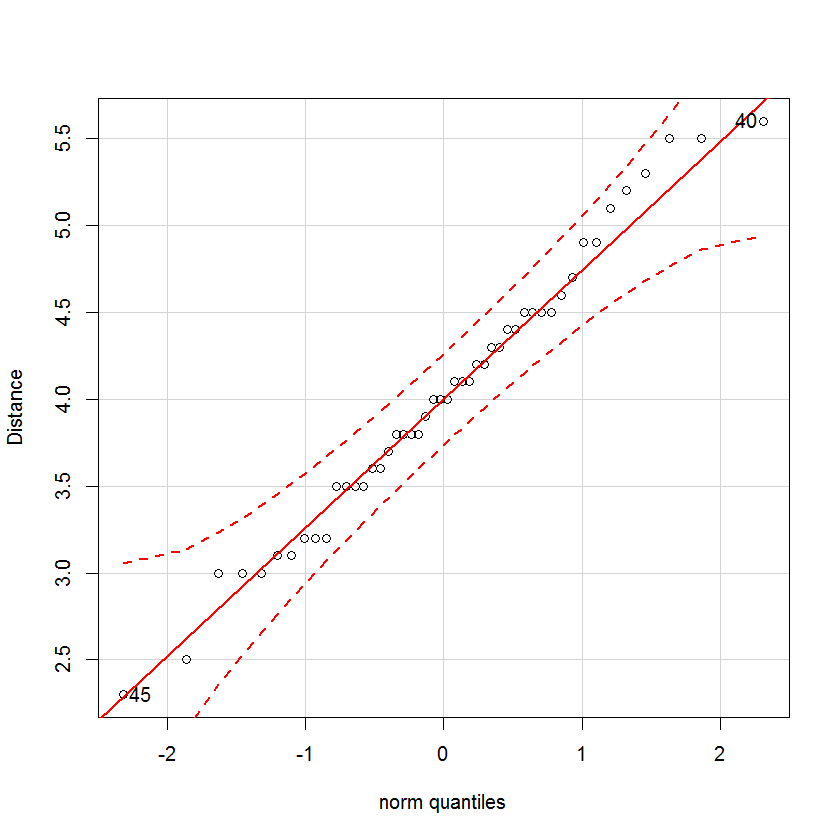
Quantile comparison plot

All points in this plot are along the normal line, which means we can assume a normal distribution. Now, we perform an ANOVA test on the trial number to see if there exists a difference between the trials. H0 = all trials are the same.
| df | Sum Sq | F value | p | |
|---|---|---|---|---|
| Trials | 2 | 18.61 | 41.45 | 6.19e-11 |
From this p value (6.19e-11), we reject H0 and conclude that there is at least one trial which is different from the others. Now that it is known that at least one of the trials is different from the others, we perform a post-hoc Tukey range test to test if the means of the trials compared with each other are significantly different. The null hypothesis in the Tukey's range test states: H0= 'The means being compared are from the same population, i.e. μ0=μ1'
| Estimate | SE | t-value | p-value | |
|---|---|---|---|---|
| t2 - t1 == 0 | -0.7938 | 0.1675 | -4.738 | < 1e-04 |
| t3 - t1 == 0 | -1.5250 | 0.1675 | -9.103 | < 1e-04 |
| t3 - t2 == 0 | -0.7312 | 0.1675 | -4.365 | 0.000195 |
We take a confidence of 95%, which means α=0.05.
t2 - t1 == 0: We reject H0, because p<α.
t3 - t1 == 0: We reject H0, because p<α.
t3 - t2 == 0: We reject H0, because p<α.
From this we conclude that the means of the three trials are not equal, which means there is a significant difference of result between all trials. This however does not give us how the trials differ from each other. to find this difference, we use R to create a regression model with response variable 'Distance' and explanatory value 'Trial'. First, using R, we calculate the correlation between the distance and the trial to analyse if the correlation is significant and how they might be correlated.
| Distance | Trial | |
|---|---|---|
| Distance | 1.0000000 | -0.8048759 |
| Trial | -0.8048759 | 1.0000000 |
Since the value (-0.8048759) is negative, there is a clear negative correlation between distance and trial. Since the value is close to -1, we conclude that a linear model is sufficient for this data.
In order to find the actual relation between distance and trials, we create a linear model for the distance and trials. This model will be of the form Y=β0 + β1 * x. Here x represents the trials. For the model values, we used R's linear model function:
| Estimate | SE | t-value | p-value | |
|---|---|---|---|---|
| Intercept | 5.54583 | 0.17907 | 30.971 | < 2e-16 |
| Trial | -0.76250 | 0.08289 | -9.199 | 5.41e-12 |
To get a proper model equation, the correct accuracy needs to be applied:
| Value | SE | Accurate Value | |
|---|---|---|---|
| Intercept | 5.54583 | 0.17907 | 5.55 |
| Trial | --0.76250 | 0.08289 | -0.763 |
Therefore the model is: Y=5.55-0.763x.
This therefore clearly shows a significant negative correlation between the distance and the trials. The distance participants let the drone fly above their heads depends on how often they already performed the test.
We now perform the ANOVA for the genders to test if there is a significant difference.
| df | Sum Sq | F value | p | |
|---|---|---|---|---|
| Gender | 1 | 5.467 | 10.82 | 0.00193 |
We take again the standard confidence of 95%, which means α=0.05. We therefore reject H0, because p<α. This means that there is at least one gender which is different from the others and because there are only two genders, we conclude that there is a significant difference between the two genders in terms of the distance to which they allow the drone to come.
Individual evasive movement
Setup
- Problem statement
How and when does an individual get out of the way of a landing drone?
- Hypothesis
We expect that an individual will move out of the way of a landing drone as quickly as possible, which means that they move in the direction opposite from the drone position in relation to their position. We also expect the moment the individual starts moving away from the drone will correlate to the personal space results from the personal space experiment.
- Aim
The aim of this experiment is to see how an individual reacts when a drone attempts to land near a person, when coming from above. We also want to see how the direction of approach influences the direction in which the individual steps out of the way. It is also of relevance to see if the individual keeps the drone in their field of view or decides to do something different.
- Equipment and materials
For this experiment we will be using an AR parrot 2.0 power edition drone. The drone has a built-in height sensor. We don’t have access to the actual AED drone, however, we believe this drone is similar enough that it will produce the same results. Furthermore, we will use a camera to record and analyse the video later on and finally we need some people to conduct the experiment on.
Drone:
- Weight: 420 g
- Size (length, width): 57cm by 57cm
- Method
We will be using a within-subjects design (all subjects are exposed to every experiment) in order to allow a direct comparison of distance data from each participant. For this experiment, we will be using the same participants whom have participated in the previous personal space experiment. Let all participants get a close look at the drone in order to prevent that participants let the drone get closer in order to have a better look at it, since the technology is still novel. This means that during the experiment, the participant is fully aware of the drone we’re doing the experiment with. The experiment takes place outside, since no suitable open space was found indoors and it increases the realism of the experiment. The space has to have minimal windy conditions, since it could interfere with the accuracy of the experiment. The participant is asked to be standing up at the beginning of the experiment. After the trial has started, the participant is free to move around in any way they feel comfortable. The drone starts 10 meters above the participant and will descend at a certain speed. The speed is changed in different trials, however the drone will never descend at a speed which is dangerous. The participant prior to the experiment is requested to get out of the way at any time they feel comfortable. The drone operator lands the drone and maintains a constant speed during the landing. For each approach angle, the participant indicates their preference of the approach by a Likert scale and a brief explanation for the given value. After all experiments, the participants are asked to express their feeling towards the experiment in order to evaluate if any factors might have influenced the results.
- Approach angles
For this experiment, the same polar coordinates are used as in the personal space experiment. We use approach angles right above the person and polar coordinates {(0.5m, 0°), (0.5m, 70°), (0.5m, 90°), (0.5m, 135°), (0.5m, 180°), (0.5m, -70°), (0.5m, -90°), (0.5m, -135°), } of the person.
- Approach Height
For consistency reasons, we start at the same height as the personal space experiment, i.e. 10 meters[8]. If results show that this is inadequate, or excessive, we will adjust this height accordingly.
- Expected result
We expect a correlation in trends between the drone height and the participants moving and the found personal space in the previous experiment. For the direction in which the individual moves, we expect that it is the opposite direction from which the drone is approaching the individual.
- Treatment of results
- The direction in which the participants move are evaluated via an agreement score. The agreement score Ar evaluates for each approach angle which movement direction was the most agreed upon [9]:
- [math]\displaystyle{ A_r = \sum_{P_i} ( \left| \frac{P_i}{P_r} \right| )^2 }[/math]
Where Pi is the subset of all identical movements and Pr is the subset of all proposed movements. Movement directions can never be completely identical, therefore we distinguish eight different directions; North (-22,5° to +22,5°), North East (+22,5° to +67,5°), East (+67,5° to +112,5°), South East (+112,5° to +157,5°), South (+157,5° to -157,5°), South West (-112,5° to -157,5°), West (-67,5° to -112,5°) and North West (-22,5° to -67,5°). To evaluate the similarities between the personal space results and the moment the person starts ‘evading’ the drone in this experiment, we perform an ANOVA test on both results to test the hypothesis that these means are significantly similar.
Results
The drone was not stable enough in order to do the experiment above. We could not get the drone at the right angle and there was a danger that the drone would crash into the people who were willing to participate with the experiment. Therefore, this experiment was not used for our data. In order to fully do this experiment in the correct way, a better drone is needed. However, the parrot drone we currently used was just not stable enough.
Crowd movement
Setup
For the second experiment, we have taken 9 adults, from which 4 were female, and put them in group. The reasoning behind this was for to be able to see if people would react differently if they were in a group of people compared to how they acted while they were alone. The age factor of the participants was between 50 and 60 years old. The people would be dived in three groups of three, making a cubic shape and leaving halve a meter distance between them.
Result
Summary
When preforming the personal space experiment on the group, certain trends could be seen right way. As the drone was not flying straight above all of the participants, it could be spotted that some were uneasy, as the drone was not always in sight.
However, the first group whose personal space was intruded was due to the person in the middle. After interviewing, it became clear that the cause of this was due the lack of capable movement, or in other words, the amount of obstacles (other participants) present. The middle person was not able to run in any of the directions, as they were all blocked by fellow participants. The second group whose space was invaded was the front group. They lacked the constant vision on the drone, making it hard to decide where the exact location of the drone was. This caused them to feel invaded.
The last group was the back group. These persons were the last group whose personal space was invaded. This was due to having constant vision on the drone and not be limited by obstacles, meaning they could jump away in every instance if they so desired.
Thus, one can conclude that if the AED Drone would be flying over a busy street, its height should incorporate the feelings of the persons who cannot jump away if they wanted and might feel threatened by the drone.
Discussion
notifying the crowd
Currently, sound are being used for alerting users in the area of a given car. This is done so that people know they should move away. For the drone, cars don't have to move away as such, however there is a crowd of people that should move away. Since the drone will be flying above houses, where there are no obstacles, sound should only be made near the destination to avoid disturbance. However, it should be on time such that people can already start moving away. We believe that a distance of about 50 meters should be sufficient to give people enough time to move away from a crowded spot and leave some place for a drone to land. according to the paper of the AED drone[1] the drone can accelerate and decelerate at 25 m/s^2. using the physics formula to calculate the the distance by the time and acceleration s = t + 0.5at^2, we calculate that it takes 2 seconds to accelerate at a speed of 25 m/s^2 at a distance of 50 meters. we believe 2 seconds is long enough to alert people a drone is coming, and is also short enough to optimize the amount of time it takes for the drone to land. In addition to the speed, we also believe the drone should make a distinct sound when approaching the crowd. This is done such that the people in crowd will not be confused with an ambulance, once people recognize what sound the drone makes, they will know a lot better how to react.
Effect of the wind
When the experiments were done, we took notice that the wind is influenced the drone too much. This has quite a big impact on the experiments as the drone could not steady fly in a straight line without having to do adjustments to the control. This meant that flying above a person and slowly moving down was an hard task to complete. A person could not really stand underneath a drone as it moved every few seconds to the side. If we tried to slowly descent, the drone would already move with the wind. Therefore, we have to reason which salutation are most suitable for the next set of experiments.
- A heavier drone can be used in order to make the wind affect the drone less. If the drone is heavier, the wind will not push the drone away when it is trying to hover above a person. However, we do not know if an heavier drone will be available on the University. The persons in Delft did not answer the mails send to them and we think that Duarte does not possess an heavier drone. The option of hiring a drone will also be hard as most big drones need an licensed operator which makes doing our experiments very costly.
- An inside location can be used in order to counter the effect of the wind. However, the soccer pitch has an roof of 3 meters, which makes the personal space experiment impossible. For the experiment to be a success, we need at least 7 meters of height. This can be achieved in certain college rooms, however, we do not know if we can book a college room and if we use a college room, we cannot ask random people.
- If the first two solutions cannot be done, than we have to keep doing the experiment the same way as we did before despite the wind moving the drone to not preferred locations.
Battery Life
The battery of the AR Parrot has an estimated battery life of 12 minutes. In these 12 minutes, we can roughly do one experiment on one person. This makes doing the experiment really counterproductive. Therefore, we probably will need 4 to 5 batteries to be able to do a full experiment as charging a drone takes about 3 hours. We contacted Duarte for more batteries and received additional ones.

Protocol
The AED drone needs to be able to deal with big crowds. In order to improve the landing speed and safety, people in the crowd need to know what they have to do when the drone wants to land. How people react in an emergency depends on how well they are prepared, which we try to accomplish with this protocol [10]
Reasoning
If a person needs to move out of the way from the drone, there is a likelihood that they will be blocked by nearby people. Therefore there needs to be a mutually understood protocol which will ensure that people move accordingly in order to make enough space. People who are closer to the drone should be prioritized and the surrounding crowd should try to help them move away from the drone. According to Helbing et. al., it is implied that people are moving with less panic and in a more controlled manner if they are feeling comfortable and relaxed.[11] Therefore keeping close contact with nearby people to a minimum needs to be a priority. In conclusion people should move in a calm and controlled manner such that everybody can move out of the way whilst avoiding stress and panic by avoiding close contact with nearby people.
Person calling the drone: After you have contacted the emergency services and they have informed you that they will send a drone, you shall receive instructions from the operator. The instructions will be: You will go to the nearest possible landing spot for the drone. There you shall pick up the drone and bring it to the person suffering from heart attack. Then you will attach the AED.
Someone can find themselves in one of two scenarios:
- A stationary crowd or a moving crowd. In the case of a stationary crowd, avoid uncoordinated motion[11] in order to reduce fear and panic in the crowd.
- In a moving crowd, avoid standing in one place in order for the flow of the crowd not to be disturbed and people getting involuntarily stuck in the crowd, which can cause panic.
Rules
When a person notices that an AED drone is in the vicinity and it indicates that it wants to land, it best that he follows the following rules:
- If you are in a position near to where the drone indicates that it wants to land, you should move out of the way.
- If you are not near the drone, do not stand and watch, but keep moving in order to keep the street from overcrowding.
- Make sure that other people can also move out of way of the drone.
- You have to make way for the caller of the drone.
- Do not panic, stay alert and avoid being distracted.
- Do not try to catch the drone and let it land safely.
Poster

Recommendations
The scope of this project has been the landing phase of the drone, as it is critical to do this as fast as possible. After the research on the subject, it has been found out that the AED drone has a couple of factors which can be improved. During this project some unexplored subjects came to light with regards to drones and human interaction.
The amount of research already done in the field of human-drone interaction is limited, especially for drones above the person. We strongly recommend that more research is done in this field since, as shown by the ambulance drone, drones could improve important areas in our society. We have performed one full experiment, but we also recommend that the experiment of personal evasive movement when landing a drone is done. The experiment on personal space can also be extended with more approach angles to gain more understanding the actual personal space all around a person. When performing either of these experiments, it is strongly recommended that a stable and reliable drone is used as it can influence the results. Furthermore, we recommend that our exploratory experiment with a small crowd is repeated and extended with more participants and more trials.
One of the assumptions in our experiment is that the participant is aware of the drone. This is however not necessarily the case in a real-life scenario. To overcome this problem we recommend a couple of key points.
- Equip the drone with a siren. This is also a direct recommendation to the TU Delft ambulance drone and a repeat of their own recommendations. A problem which could occur in open spaces is that no one would notice the drone which wants to land. In order to make the people more aware of a nearby drone we propose that an alarm system should be added, which would activate when a drone nears his point of landing. Although not researched in our project, we recommend to further explore this in further research.
- Equip the drone with landing lighting. This is another awareness measure in order to increase the landing speed. This is again a recommendation to the TU Delft ambulance drone and a repeat of their own recommendations. In order to clarify and therefore reduce panic and anxiousness from the nearby people as to where the drone wants to land, it is a good idea to add a lighting system which would indicate where the drone plans to land. Although not researched in our project, we recommend to further explore this in further research.
- Make people aware of the existence of the drone. Since the use of drones is really novel at this point, before implementing an ambulance drone, people need to become aware that they could need to pay attention to something coming from above. As described in the protocol part, a protocol on how people should react would help improve how fast people get out of the way. Therefore, we highly recommend that before implementing an ambulance drone in public, first the protocol has to be distributed and promoted.
Conclusion
As can be seen from the results, a very important factor when it comes to human interaction with drones is trust. If a person trusts a drone more, he/she will let it come a lot closer. This result was to be expected, since to a certain degree, the same applies to a human interacting with another human. You allow the ones you trust to come close to you. Even though for humans this is not meant in a literal way, it still shows a lot about the level of trust a human being can develop. What this means for the AED Drone is that with time, people will be more comfortable with a drone flying close to them, meaning the drone is able to fly closer to the ground. The closer to the ground the drone can fly, the less time it takes to land. This will then leed to a shorter traveling time to reach a patient, thus improving the odds of survival. For example: a drone hovering at 3 metres above the ground will need 3 seconds to land when it is at a speed of 1 m/s. The same drone hovering at 10 metres above the ground will need 3 times as much time in order to make the same landing. This may not seem like a significant change, but when it comes to treating a heart attack, every second counts. The protocol which people need to follow when an AED Drone is approaching will make the landing happen smoothly and quickly. Here, the familiarity of the drone comes back. The more times a person deals with this kind of situation involving an AED Drone, the easier it will be for him/her to respond to this and do what is asked of him/her. When the ambulance was first introduced in the 20th century, people did not know how to behave in order to enable the ambulance to do its work. However, now this is not the case anymore. Once an ambulance approaches another car on the road, the driver in the car knows where to move in order to let the ambulance through. The same will happen with the AED Drones once people get used to it more. The protocol will be followed better and this will improve the survivability of a heart attack.
Meeting notes
Week 1
Presentation feedback:
- Sounds: Where does it come from (specific sound)
- Etiquetes of behaviour: how people should react (not yet established for drone ambulances)
- Catching a drone instead of landing it
- What is the need: What is the current availability of AED's
- When should the drone create noise (if any)
- What will we add to the existing product of TU Delft
- Where did TU Delft reasearch stop
Week 2
After the presentation, what is the definitive direction of our project?
Most studies about crowd movement focuss on an non-interruptive environment where fluid dynamics can be used in order to model the behaviour. We want to focuss more on the human aspects, which are unpridictable agents.
We make a map of available AEDs in Eindhoven and when they are still available for use to illustrate the problem. What is the survival chance?
- Experiment:
- Rules and Regulation: (Nikolay & Patrick)
- Privacy
- Criminality
- Safety (weather)
- Liability (assuming it is autonomous
- Experiment plan (Rense & Wessel
- Code of Cunduct (of the tu/e)
- Reasoning (+Hypothesys)
- Experiment Setup
- Rules and Regulation: (Nikolay & Patrick)
Update Wiki (finilaze problem statement etc.):
- Thom
Next meeting: 8-5, 11:15, MF15
Week 3
Meeting May 8th
The problem statement is vague and inaccurate:
- Provide a more concrete problem statement
- We described law, but it is not part of the problem statement (best to not include it at all, since it is not actually relevent to our project)
- Perhaps skip the ethical part
- Focuss more on landing as fast as possible In a human acceptable way
- How much 'fear' or 'panic' is acceptable in order increase the landing speed.
Experiment:
- Perhaps perform an experiment with a crowd
- Perhaps do the experiment in Delft?
- What if the drone arrives early?
- Prevent interference of bystanders
USE:
- Are there exceptions for ambulance/police drones currently?
- Perhaps there are interesting rules for ambulance helicopters
- Are there exceptions for unmanned aerial vehicles?
Other:
- A map of AEDs is a good introduction to the problem statement, and what is the best strategical placement of the drones.
- Who currently pays for the AEDs?
- Perhaps recommend rules and regulations in our conclusion
- Rules and regulations should not be our main focuss in this project
Next meeting:
- Read the ambulance drone paper (on the drive) - All
- Rewrite problem statement
- Improve Objectives - Nikolay
- Further elaborate Users - Patrick
- Setup of the experiment - Wessel
- State of the art (paper) - Thom
- Look up robot experiment examples - Rense
Next meeting: 10-5, 10:00 in OGO2
Meeting May 10th
- State of the art of the drone (TU Delft paper) - Patrick
- Map (why do we need drones) - Thom
- Theory (How do EADs work, using the drone from start to end) - Nikolay
- Elaborate USE part - Rense
- Experiment (further elaborate the options) - Wessel
Week 4
Meeting may 15th
- Look at a previous group who did package delivery with a drone
- Perhaps incorporate approach velocity in the experiment
- Make sure we have a good end product in mind
- Keep all tasks relevant to the end product
- Take technical implementations from Delft for granted
- Keep all tasks relevant to the end product
- For the experiment setup, formulate how to process the data
- Formulate in general better questions regarding the project
- Why are we doing this? Is it relevant? ... etc.
- How are we going to achieve the goals
- Split problems in smaller parts (Divide and conquer)
- For the drone, contact Duarte Antunes (D.Antunes@tue.nl)
Week 5
Meeting may 22nd
- Arrange more accu's to be able to perform the experiments
- How much does an accu cost?
- Perhaps try with two persons
- How does the individual experiments scale to a larger crowd
Meeting may 24th
We performed preliminary experiments:
- Use more reliable control software (3rd party)
- Perhaps arrange an heavier drone, since the current one is easily influenced by wind.
- Perhaps find a better inside location
- Make sure there is enough open space to move about.
- Use third party software to extract flight data from the drone in order to get more accurate data.
Week 6
Experiment meetings: 31-5 (14:00, 17:00), 1-6 (12:00, 15:00), 2-6 (10:00)
Technical issues during experiments.
Week 7
Meeting June 7th
Personal space experiments done TODO:
Process measurements (Thom, Wessel)
- Insert all information
- Male/female
- 1st, 2nd, 3rd time
- State of the participant (interested/drunk)
- Discussion data and assumptions (application for any drone)
Guidelines for a landing drone (Patrick, Nikolay)
- Fastest way
- people's behaviour (set up a protocol)
- Sounds/sirens
State of the art (Rense)
- drone design
- color, sound, speed, other specs
- Personal space with drones
Conclusion, Discussion
Week 8
Meeting June 12th
Meeting June 14th
Prepare the presentation:
- Intro (problem -> heart diseases, show delft drone)
- Problem statement/goal (Needs to be clear)
- Objectives (Revise)
- Experiment setup
- Experiment assumptions (write an overview)
- Results + video
- Discussion/results analysis (implement post-hoc)
- Conclusion
- Recommendations
Planning
Milestones
- First presentation: 1-05-2017
- Second presentation: 26-06-2017
- Finish defining problem statement: 3-05-2017
- Finish literature study: 22-05-2017
- Finish Data analysis: 11-06-2017
- Finish Experiments for the drone: 11-06-2017
- Finish Wiki: 18-06-2017
Gantt Diagram

New Planning for the final 5 weeks
Week 4: Make arrangements for the experiments (drone, room, people, pick a date for next week)
- Do try-out experiments (try the experiments on ourselves)
- Improve experiment plan (make it very explicit, step by step)
- Processing results (hypothesis, what to do when we actually get the results?)
- Check our wiki with the original planning
Week 5 (only Monday, Tuesday, Wednesday):
- Perform experiments on test people
- Analyze first data
Week 6:
- Perform experiments if we don’t have enough data yet
- Analyze and process data
Week 7:
- Complete analysis of the experiments and connect the correct conclusions to them.
Week 8:
- Finalizing everything (presentation, wiki, evaluation, follow up research)
Week 9:
- presentation
Peer Review
Thom: 8
- Took a lot of work on his shoulders for the execution experiment and many other smaller tasks. Shaped a lot of the project. Overall commendable work
- Most active person of the group.
- Good enthousiasm, knows what needed to be done, carried out the experiments well, made important decisions when necessary. Communication could have been a bit better
Rense: 7
- Did everything he needed to do and did it well.
- Did a decent amount of work, nothing special to say about it.
- Was an usefull member of the group. Got the things done when asked.
Nikolay: 6.5
- Did work, but often needed some additional corrections.
- Did some good work, about average.
- Had some good input during meetings, but did not elaborate on some things he had written. The pieces he wrote were sometimes unclear and unstructured.
Patrick: 4.8
- Not sure what he contributed to a larger extend to the project except for the occasional spelling check. Every time we expected him to have done work, he would not have time for it and artificially extend the deadline.
- Tried to do his part for this project, but the pieces he wrote were inadequate a lot of times. They often had to be revised by someone else to make it sufficient. Also, his planning could be improved, since he always had the excuse of having no time to do his task before a deadline. If the timing is an issue, the communication needs to be better so the rest of the group knows about it.
- When things on his part went wrong, he just said it at our weekly meeting instead of earlier. This resulted in work not done on time.
Wessel: 7.5
- Did a nice amount of work for the experiments, however, difficult to contact (mail is a pain).
- Did a great job in processing of the results, tasks he had were carried out in a structured way. Could have been more of a leader since he had a clear idea of how he wanted
- Made sure the experiment plan was correct and really thought through how to use the experiments towards our goal.
References
- ↑ 1.0 1.1 Momont, A., "Drones for Good" (2014). TU Delft, Master of Science Integrated Product Design.
- ↑ Roger Clarke, "Regulation and Privacy on Civilian Drones" , 2014-03-03. Retrieved on 2017-5-7.
- ↑ Chris Matyszczyk, "Judge rules man had right to shoot down drone over his house" , 2015-10-28. Retrieved on 2017-5-7.
- ↑ National Health Service, "Symptoms of a heart attack" 2015-7-9. Retrieved on 2017-5-17.
- ↑ Mayo Clinic Staff, "Heart attack, Symptoms" 2014-11-15. Retrieved on 2017-5-17.
- ↑ 6.0 6.1 Duncan, Brittany A. and Murphy, Robin R., "Comfortable Approach Distance with small Unmanned Aerial Vehicles" (2013). CSE Conference and Workshop Papers. Paper 240. http://digitalcommons.unl.edu/cseconfwork/240
- ↑ Kinzel, A. F. (1970). “Body-Buffer Zone in Violent Prisoners.” American Journal of Psychiatry 127(1): 59-64.
- ↑ 8.0 8.1 Vas E, Lescroe¨l A, Duriez O, Boguszewski G, Gre´millet D. (2015), Approaching birds with drones: first experiments and ethical guidelines. Biol. Lett. 11: 20140754. http://dx.doi.org/10.1098/rsbl.2014.0754
- ↑ Wobbrock, J. O., Aung, H. H., Rothrock, B., & Myers, B. A. (2005). Maximizing the guess-ability of symbolic input. In Conference on Human Factors in Computing Systems - Proceedings. (pp. 1869-1872). DOI: 10.1145/1056808.1057043
- ↑ Safety Study Emergency Evacuation of Commercial Airplanes NTSB/SS-00/01 PB2000-917002 National Transportation Safety Board, June 27, 2000
- ↑ 11.0 11.1 Helbing, D., Farkas, I., Vicsek, T., "Simulating dynamical features of escape panic" (2000). Nature 407, 487-490. http://dx.doi.org/10.1038/35035023